Wetenschap
Een nieuwe benadering om robotnavigatie in binnenomgevingen te verbeteren
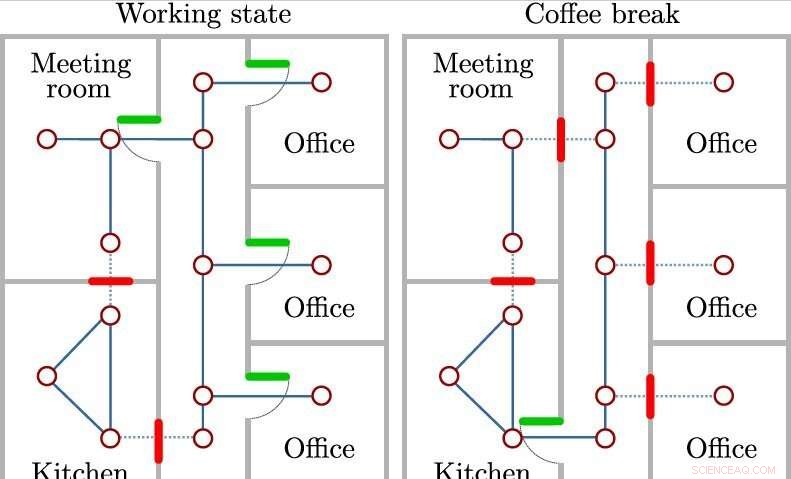
Een eenvoudig voorbeeld van herhalende configuraties in een kantoor. Krediet:Nardi &Stachniss.
Om effectief door hun omgeving te navigeren, robots plannen doorgaans paden op basis van vooraf ontworpen kaarten van de omgeving waarin ze opereren en observaties die door hun sensoren zijn verzameld. Hoewel dit type navigatiestrategie nuttig kan zijn in eenvoudige en statische omgevingen, het is verre van ideaal in meer complexe en onvoorspelbare, zoals die in de echte wereld.
In feite, zelfs als kaarten die aan een robot worden toegevoerd zorgvuldig zijn samengesteld en nauwkeurig zijn, ze houden geen rekening met onverwachte obstakels of veranderingen in de omgeving. Aangezien de meeste omgevingen waarin robots uiteindelijk moeten worden ingezet (bijv. ziekenhuizen, winkelcentra, luchthavens, enz.) zijn zeer onvoorspelbaar en veranderen snel, navigatiebenaderingen die voornamelijk afhankelijk zijn van vooraf ontworpen kaarten, kunnen leiden tot slechte trajecten en navigatiestrategieën.
Bewust van dit probleem, twee onderzoekers van de Universiteit van Bonn hebben onlangs een aanpak ontwikkeld waarmee robots gedurende langere tijd effectiever kunnen navigeren in snel veranderende binnenomgevingen. Deze nieuwe aanpak, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, werkt in wezen door herhalende patronen vast te leggen in hoe een omgeving verandert en deze kennis te benutten om weloverwogen navigatiebeslissingen te nemen.
"Het idee van deze studie is dat veel veranderingen in binnenomgevingen plaatsvinden na herhalende ruimtelijke patronen, bijvoorbeeld deuren die tegelijkertijd openen en sluiten, "Lorenzo Nardi, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore . "Robots die voor langere tijd in deze omgevingen worden ingezet, kunnen de omgeving observeren en er continu informatie over verzamelen en deze kennis benutten om betere navigatiestrategieën te plannen."
In een eerdere studie, hetzelfde team van onderzoekers ontwikkelde een aanpak die informatie verzamelt over hoe een terrein de navigatie van een robot buitenshuis beïnvloedt en deze vervolgens gebruikt om trajecten te berekenen die trillingen aan boord en stroomverbruik minimaliseren. In hun nieuwe studie ze besloten zich te concentreren op robotnavigatie binnenshuis, door de verschillende configuraties te voorspellen die een omgeving in de loop van de tijd aanneemt.
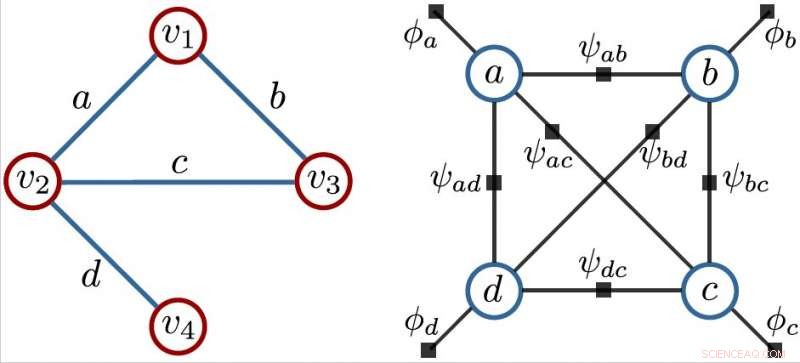
Een voorbeeldtopologie (links) en het probabilistische grafische model dat de onderzoekers in hun werk hebben gebruikt (rechts). Krediet:Nardi &Stachniss.
De aanpak die ze ontwikkelden, is ontworpen om de navigatie binnenshuis van een robot te verbeteren door patronen van dynamische omgevingsveranderingen te modelleren en deze informatie te benutten om paden voor de robot te plannen. Door hun aanpak te gebruiken, zo komt een robot op zijn pad naar een bepaalde locatie minder obstakels en geblokkeerde doorgangen tegen.
"Het belangrijkste voordeel van onze aanpak is dat het een omgevingsrepresentatie beschouwt die in staat is om continu nieuwe observaties over de omgeving te integreren, " legde Nardi uit. "Deze weergave maakt het mogelijk om betere trajecten in de tijd te plannen dan hebzuchtige planners van de kortste paden op basis van statische geometrische kaarten van de omgeving."
De onderzoekers evalueerden hun aanpak door deze toe te passen op een reeks scenario's in vier verschillende binnenomgevingen:een klein kantoor, een middelgroot kantoor, een groot kantoor en een ziekenhuis. Bij deze experimenten hun aanpak presteerde opmerkelijk goed, het plannen van effectieve paden die rekening houden met veranderingen in het milieu. In aanvulling, ze vergeleken hun aanpak met bestaande technieken op basis van statische kaarten en ontdekten dat het kortere en betere paden genereert wanneer de robot voor langere tijd wordt ingezet.
"Onze bevindingen laten zien dat hoewel de complexiteit van het navigatiesysteem toeneemt, onze aanpak leidt de robot in de loop van de tijd om nauwkeurige voorspellingen te doen over omgevingsconfiguraties en deze kennis te benutten om langs kortere paden te navigeren, ' zei Nardi.
In de toekomst, de door Nardi en zijn collega Cyrill Stachniss voorgestelde aanpak zou kunnen helpen om robotnavigatie in snel veranderende binnenomgevingen te verbeteren. Het kan met name handig zijn in omgevingen waar de efficiëntie van een robot van cruciaal belang is, zoals ziekenhuizen. De onderzoekers zijn nu van plan om hun aanpak te testen met behulp van een echt robotplatform, omdat dit hen uiteindelijk in staat zal stellen te evalueren of de eerste bevindingen die ze hebben verzameld nog steeds gelden in de praktijk.
"Een andere interessante richting voor toekomstig onderzoek zou kunnen zijn om hoogfrequent dynamisch gedrag te integreren, zoals andere bewegende dynamische agenten, in het kader, ' zei Nardi.
© 2019 Wetenschap X Netwerk
 Verandering van richting in immuunafweer:wierook herprogrammeert ontstekingsenzym
Verandering van richting in immuunafweer:wierook herprogrammeert ontstekingsenzym- Nieuw algoritme helpt vergeten figuren onder Da Vinci-schilderij te ontdekken
- Regulering van CO2 in het lichaam
- Hoe wordt propaan gemaakt?
- Geneesmiddelenresistentie bestrijden met snelle, kunstmatige verbetering van natuurlijke producten
Hoofdlijnen
- Staan we op een kantelpunt met onkruidbestrijding?
- Exon: definitie, functie en belang in RNA Splicing
- Stages of Mitosis (Cell Division)
- Geschiedenis van de aarde: tijdlijn, proces en feiten
- Je lichaam doneren aan de wetenschap wordt steeds populairder in de VS
- Hoe zijn fotosynthese en cellulaire ademhaling gerelateerd
- Hoe zal klimaatverandering de arctische kariboes en rendieren beïnvloeden?
- 10 tips van gelukkige mensen
- Hoe Brain Mapping werkt
- meer doekjes, geen jeans:Amazon beperkt verzendingen naar magazijnen

- Nieuw materiaal vangt giftige luchtverontreinigende stoffen op en zet deze om in industriële chemicaliën
- Wat is augmented reality, hoe dan ook?

- Grote plannen om de planeet te redden zijn afhankelijk van nanoscopische materialen die de energieopslag verbeteren

- Windenergie snelle groei, uitgelegd (update)

 Wetenschappers hebben meer vertrouwen in het projecteren van ENSO-veranderingen onder het broeikaseffect
Wetenschappers hebben meer vertrouwen in het projecteren van ENSO-veranderingen onder het broeikaseffect- Inzichten over de enorme impact die seizoenen hebben op agrarische economieën
- Hoe een oxidatie nummer te vinden
- Raciale vooroordelen bij kinderen verminderen
- Het gebruik van neurale netwerken om deeltjes te ontdekken
- De exorbitante kosten van klimaatuitstelgedrag
- Metasurface hologrammen:snel, compacte polarisatiemetingen voor spectroscopie en sensing
- Firmware, blinde vlekken gemarkeerd door onderzoek naar Spectre-aanvallen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
