Wetenschap
Een robot met een stevige maar zachte greep
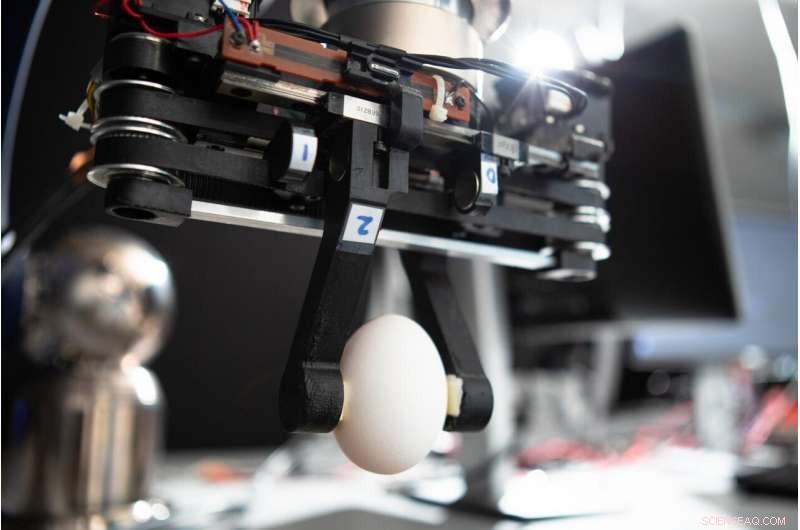
Een robotgrijper ontwikkeld in het laboratorium van de Universiteit van Buffalo, ingenieur Ehsan Esfahani, gebruikt afstoting tussen magneten om de stijfheid van de greep aan te passen, veiligheid verbeteren. Credit:Douglas Levere/Universiteit in Buffalo
Mensenhanden zijn opmerkelijk bedreven in het manipuleren van een reeks objecten. We kunnen een ei of een aardbei oprapen zonder het stuk te slaan. We kunnen een spijker slaan.
Een kenmerk dat ons in staat stelt een verscheidenheid aan taken uit te voeren, is het vermogen om de stevigheid van onze greep te veranderen, en de ingenieurs van de Universiteit van Buffalo hebben een robothand met twee vingers ontwikkeld die deze eigenschap deelt.
Het ontwerp van de robothand stelt hem in staat om tijdens botsingen energie te absorberen van schokken. Dit voorkomt dat alles wat de robot vasthoudt, breekt, en maakt het ook veiliger voor mensen om met en in de buurt van de machines te werken.
Dergelijke grijpers zouden een waardevolle aanwinst zijn voor samenwerking tussen mens en robot in assemblagelijnen in de automobielindustrie, elektronische verpakking en andere industrieën, zegt Ehsan Esfahani, doctoraat, universitair hoofddocent werktuigbouwkunde en ruimtevaarttechniek aan de UB School of Engineering and Applied Sciences.
"Onze robotgrijper bootst het vermogen van de menselijke hand na om de stijfheid van de grip aan te passen. Deze grijpers zijn ontworpen voor collaboratieve robots die samenwerken met mensen, "zegt Esfahani. "Ze worden helpers, dus ze moeten veilig zijn, en variabele stijfheid grijpers helpen om dat doel te bereiken."
Een nieuwe studie online gepubliceerd op 10 september in IEEE-transacties op industriële elektronica benadrukt het veilige ontwerp van het apparaat, onder meer door experimenten die laten zien hoe de schokabsorberende eigenschappen van de grijper voorkomen dat een spaghettistick breekt tijdens een botsing.
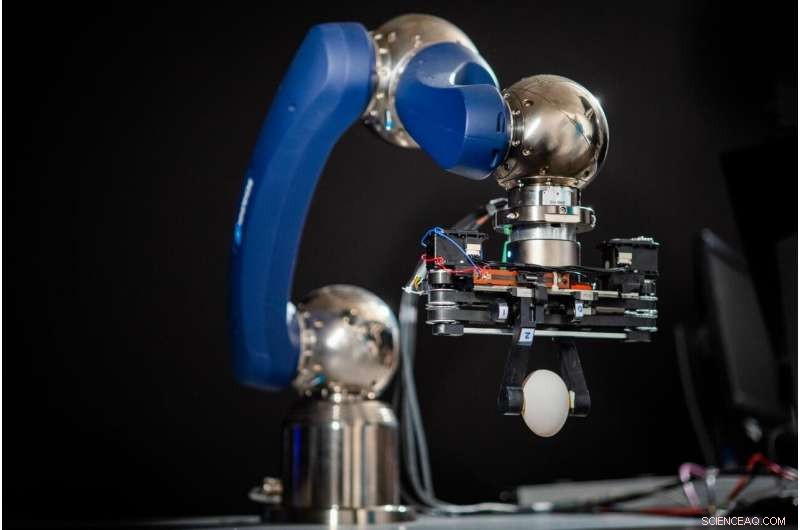
Een robotgrijper ontwikkeld in het laboratorium van de universiteit van Buffalo, ingenieur Ehsan Esfahani. De grijper is bevestigd aan een in de handel verkrijgbare robotarm. Credit:Douglas Levere/Universiteit in Buffalo
Magneten geven deze robot een zachte touch
Esfahani legt uit dat magneten het geheim zijn achter de veelzijdigheid van de robotgrijper.
In plaats van twee vingers die op hun plaats zijn vastgezet, elk van de vingers van de grijper heeft een magnetische basis die tussen twee neodymiummagneten zit die afstoten, of duwen tegen, de vinger.
De luchtspleet tussen de magneten werkt als een veer, een beetje meegeven wanneer de hand een voorwerp oppakt of botst met een externe kracht. De stijfheid van de grip kan ook worden aangepast door de ruimte tussen magneten te vergroten of te verkleinen.
In de nieuwe krant Esfahani en Amirhossein Memar, een voormalig UB Ph.D. kandidaat in werktuigbouwkunde en ruimtevaarttechniek, rapporteren over deze veiligheidsvoorzieningen.
In een reeks tests, de ingenieurs plaatsten een korte spaghettistaaf in de lengte tussen de vingers van de robothand. Toen de grijper tegen een vast object botste, het apparaat heeft gedetecteerd dat de externe kracht wordt uitgeoefend, waardoor de magneten hun positie aanpasten, tijdelijk de stijfheid van de grip verminderen en de grijper in staat stellen een deel van de energie van de botsing te absorberen.
Het eindresultaat? De spaghettistick bleef heel.
Volgende stappen in ontwikkeling
Esfahani merkt op dat de grijper die zijn team ontwikkelt, kan worden bevestigd aan commercieel verkrijgbare robotarmen die al in veel faciliteiten worden gebruikt. Dit zou de kosten van het aanpassen van de technologie kunnen verlagen voor bedrijven die geïnteresseerd zijn in het verbeteren van de veiligheid en mogelijkheden van bestaande machines.
Esfahani lanceert een startup bedrijf om de grijper te commercialiseren, licentietechnologie van UB.
Zijn team heeft $ 55 ontvangen, 000 van het Buffalo Fund:Accelerator—gefinancierd door de Innovation Hub, die wordt beheerd door UB en wordt ondersteund door Empire State Development - om de robothand verder te ontwikkelen. Naast het verfijnen van het huidige ontwerp van de grijper, het team kan ook ontwikkelingen onderzoeken, zoals het toevoegen van een derde vinger.
Onderzoekers die betrokken zijn geweest bij het ontwerpen en testen van de grijper zijn onder meer Ph.D. student Sri Sadhan Jujjavarapu en Memar, de co-auteur van de nieuwe spaghettistick-studie, die zijn Ph.D. van de UB en is nu een postdoctoraal onderzoeker bij Facebook Reality Labs.
 Wereldwijd BECCS-potentieel wordt grotendeels beperkt door duurzame irrigatie
Wereldwijd BECCS-potentieel wordt grotendeels beperkt door duurzame irrigatie- Lessen uit de reeks aardbevingen in Ridgecrest
- Klimaatwetenschappers bereiken ondubbelzinnige consensus over door de mens veroorzaakte opwarming in historisch rapport
- Studie daagt zorgen rond geïmporteerde gekweekte garnalen uit
- Convectief transport verklaart ontbrekend ijs nabij de tropische tropopauze
Hoofdlijnen
- Hoe maak je een geweldige flessenraket ontworpen voor afstand
- Genen die mensen scheiden van fruitvliegen gevonden
- Inspanningen om zeeschildpadden te redden zijn een wereldwijd succesverhaal op het gebied van natuurbehoud:wetenschappers
- Een geïntegreerde beoordeling van vaatplantensoorten in Amerika
- Nieuwe studie identificeert genetische basis voor resistentie tegen maïswortelwormen in maïs
- Plasmamembraan: definitie, structuur en functie (met diagram)
- Er zit een diepere vis in de zee
- Krillgedrag brengt koolstof naar de diepten van de oceaan
- Een 3D-plantencel maken met huishoudelijke materialen
- Boeing haalt enorme order binnen bij British Airways nadat Airbus A380 . beëindigt

- Evoluerende spraak en AI als venster op geestelijke gezondheid

- Turing-test voor androïden zal beoordelen hoe levensecht humanoïde robots kunnen zijn

- Onderdelen van Li-ionbatterijen die moeten worden afgedrukt op een inkjetprinter
- Nieuwe antibiotica zijn hard nodig - machine learning kan helpen

 Oude Egyptische handleiding onthult nieuwe details over mummificatie
Oude Egyptische handleiding onthult nieuwe details over mummificatie- De soorten flessen die worden gebruikt voor het bewaren van zuren en basen
- Adsorberend materiaal ontwikkeld uit PET-flessen voor het verwijderen van antibiotica uit water
- Microsoft profiteert van stijgende winst
- Afbeelding:berg Fuji, Japan
- Koolstofbom:studie zegt dat klimaatimpact door verlies van intacte tropische bossen schromelijk ondergerapporteerd is
- Ingenieurs overwinnen een hindernis bij het kweken van een revolutionair optisch metamateriaal
- Wetenschap biedt nieuwe manier om in poriën te kijken
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
