Wetenschap
Turing-test voor androïden zal beoordelen hoe levensecht humanoïde robots kunnen zijn
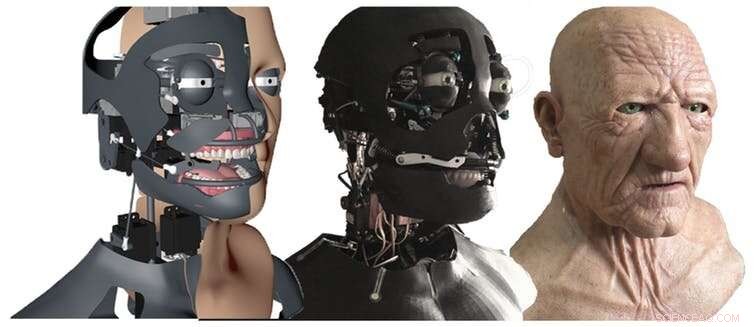
De test breekt het robotbouwproces af. Krediet:Carl Strathearn, Auteur verstrekt
Alan Turing werd onlangs aangekondigd als het gezicht van het nieuwe biljet van £ 50 voor zijn codebrekende bijdragen in de Tweede Wereldoorlog en het leggen van de basis voor informatica. Echter, Turing's werk daagt nog steeds uit en inspireert veel mensen die vandaag de dag werken, vooral die in robotica en kunstmatige intelligentie.
In 1950 vroeg hij "Kunnen machines denken?", en kwam met een test die onderzoekers nog steeds gebruiken om te beoordelen of een computer op dezelfde manier als echt intelligent kan worden beschouwd als mensen. Maar, uit een tijd waarin autonome robots nog maar in de kinderschoenen stonden, de Turing-test is alleen ontworpen om kunstmatige hersenen te beoordelen, niet een volledig kunstmatig persoon.
Nu we steeds realistischer uitziende androïden hebben, we hebben een 21e-eeuwse versie van de test nodig. Mijn collega's en ik hebben een "Multimodale Turing Test" ontworpen om het uiterlijk van een machine te beoordelen, beweging, stem en wat we belichaamde kunstmatige intelligentie (EAI) noemen. Dit is een maatstaf voor hoe goed kunstmatige intelligentie is geïntegreerd met een robotlichaam om een persoonlijkheid uit te drukken.
Dit betekent dat we een humanoïde robot systematisch kunnen vergelijken met een levende tegenhanger. Op deze manier, we kunnen de vraag stellen:"Kunnen we robots bouwen die perceptueel niet van mensen te onderscheiden zijn?"
Turing beweerde dat als een computerprogramma meer dan 30% van de mensen zou kunnen misleiden om te geloven dat het bewust was in echte omstandigheden, dan is het in feite niet te onderscheiden van de menselijke geest - het kan denken. Een computer slaagde in 2014 voor deze test. Dat betekent niet dat er geen werk is om echte kunstmatige intelligentie te creëren. Verre van. Maar de Turing Test geeft ons een maatstaf om onze vooruitgang te beoordelen.
Veel wetenschappers denken dat het uiteindelijke doel van robotica is om een humanoïde robot te creëren die niet van een echte mens te onderscheiden is. Toch is er momenteel geen standaard manier om te evalueren hoe levensecht androïden zijn, het is dus onmogelijk om deze ontwikkeling te benchmarken.
Zoals Turing, we beweren niet dat een robot transformeert in een organisch wezen wanneer het de omstandigheden van een mens kan repliceren. Maar als er een robot verschijnt, zich gedraagt en functioneert op een manier die niet te onderscheiden is van een mens in reële omstandigheden, dan kan het effectief worden gezien als hetzelfde als een mens.

Doorgaan voor mens? Krediet:Carl Strathearn, Auteur verstrekt
Een van de grootste uitdagingen voor levensechte robotbouwers is het overwinnen van wat bekend staat als de "griezelige vallei". Dit verwijst naar een ontwikkelingsfase waarin robots dichter bij mensen komen te staan, maar in werkelijkheid onaangenaam zijn voor mensen omdat ze niet helemaal gelijk hebben. Het probleem is dat conventionele methoden om het probleem te beoordelen niet genuanceerd genoeg zijn om precies te bepalen waarom een robot mensen ongemakkelijk maakt.
Deze benaderingen hebben de neiging om de robot als geheel te vergelijken met een mens, in plaats van het op te splitsen in zijn samenstellende functies. Bijvoorbeeld, een kleine misrekening in de beweging van het oog van een verder realistisch ogende robot kan het hele spel verraden. Hoogwaardige kenmerken van andere gezichtszones worden dan onderdeel van dat falen.
Ons idee is om elk gebied stap voor stap te evalueren. Zolang elk kenmerk is ontworpen om eruit te zien alsof het deel uitmaakt van hetzelfde lichaam (zelfde geslacht, leeftijd enzovoort), als een oog en mond afzonderlijk de test kunnen doorstaan, moeten ze deze ook samen doorstaan. Dit zou een robotbouwer in staat stellen om de voortgang te beoordelen om ervoor te zorgen dat elk lichaamsdeel niet te onderscheiden is van dat van een mens en om te voorkomen dat hij eindigt met iets dat in de griezelige vallei valt.
Onze test is ook georganiseerd in vier fasen, elk moeilijker dan de vorige, wat neerkomt op wat we de 'hiërarchie van menselijke emulatie' noemen. Eerst, de robot moet er gewoon echt uitzien als hij stilstaat. Tweede, het moet op een natuurlijk ogende manier bewegen. Derde, het moet een realistische simulatie van fysieke spraak produceren, zowel in uiterlijk als in de manier waarop het beweegt.
Eindelijk komt de test van belichaamde kunstmatige intelligentie, beoordelen of de robot op de wereld kan reageren door emoties realistisch uit te drukken, zodat hij op natuurlijke wijze met mensen kan communiceren. Als een humanoïde robot tegelijkertijd alle vier de niveaus van de test kan doorstaan, dan is het perceptueel niet te onderscheiden van mensen.
"We kunnen maar een korte afstand vooruit kijken, maar we kunnen daar genoeg zien dat gedaan moet worden." Deze verklaring is vandaag net zo nauwkeurig als de dag dat Turing het in 1950 zei. robotingenieurs zijn dichter dan ooit bij het bereiken van hun doel van een realistische mensachtige machine, en 2017 was getuige van de inhuldiging van 's werelds eerste robotburger.
Vandaag, we hebben de tools om humanoïde robots te ontwikkelen met een steeds levensechter uiterlijk, beweging, spraak en EAI. Maar onze Multimodale Turing Test geeft ingenieurs een toegankelijke manier om hun werk te evalueren en zo te verbeteren.
Net als bij de originele test van Turing, onze benadering roept vragen op over wat het betekent om een persoon te zijn als we niet langer het verschil kunnen zien tussen een echte mens en een kunstmatige. Als we deze vragen te snel proberen te beantwoorden omdat we sneller vooruit willen dan we in werkelijkheid zijn, kan dit leiden tot fouten, zoals het verlenen van wettelijke rechten aan een machine die lang niet levensecht is. Maar hoe meer we humanoïde robots ontwikkelen, hoe meer we leren over onze waarden en zelfs onze emoties.
Dit artikel is opnieuw gepubliceerd vanuit The Conversation onder een Creative Commons-licentie. Lees het originele artikel. 
 Nieuw type binnenzonnecellen voor slimme verbonden apparaten
Nieuw type binnenzonnecellen voor slimme verbonden apparaten- Een hydrogel die stevig hecht aan kraakbeen en meniscus
- Gigantische elektronische geleidbaarheidsverandering aangedreven door kunstmatige omschakeling van kristaldimensionaliteit
- Een stap dichter bij een waterstofeconomie met een efficiënte anode voor het splitsen van water
- Psoriasis voorkomen met vanilline
- NASA's Terra-satelliet vangt einde van Atlantische tropische depressie 15
- Het nieuwe normaal van Californië kan meer intense hitte zijn, branden, droogtes en overstromingen
- Nieuwe aanpak geeft beter zicht op koolstof dieper onder de grond
- Het verschil tussen kabeljauw en zwarte kabeljauw
- Australiër breekt wereldrecord met Everest-top
Hoofdlijnen
- The Differences Between Clams & Scallops
- Goud zeven uit de datastroom
- Onderzoekers beschrijven allereerste hybride vogelsoorten uit de Amazone
- Honden likken hun mond om te communiceren met boze mensen
- Nieuwe interactieve technologie maakt zeldzame celtypes zichtbaar
- Bijtkrachtonderzoek onthult dinosaurus-etende kikker
- Hoe helpt marihuana de gezondheid van mensen
- Het belang van plantaardige cellen
- Albatrospopulaties nemen af door visserij en veranderingen in het milieu
- Wat mensen willen in een geautomatiseerde auto

- Hoe verliest een magneet zijn magnetisme?

- Standaard aangekondigd voor brailleleesregels voor verschillende besturingssystemen en hardware

- Zelfrijdende platforms van Waymo om Google-vracht te vervoeren

- Maak je klaar voor wat lama- en bagel-emoji's:appels voegen 70 nieuwe pictogrammen toe in iOS 12.1-update


 Wetenschappers identificeren 18 redenen waarom megaprojecten vaak mislukken, evenals 54 preventieve oplossingen
Wetenschappers identificeren 18 redenen waarom megaprojecten vaak mislukken, evenals 54 preventieve oplossingen- Algoritme simuleert met succes kleurperceptie voor #theDress-afbeelding
- Methaan is een krachtig broeikasgas. Zou het omzetten in CO2 de klimaatverandering kunnen bestrijden?
- Nieuwe zwaailampen verlichten het interieur
- 17 tips die je moet weten om een superzoeker op Google te maken
- Celmembraan als materiaal voor botvorming
- Hoe maak je een citroenzuurbufferoplossing
- Grote klussen:Veiligheid, planningssleutel voor het verhogen van de productieprestaties bij Spallation Neutron Source
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
