Wetenschap
Ingenieurs bouwen vloot van autonome boten die van vorm veranderen

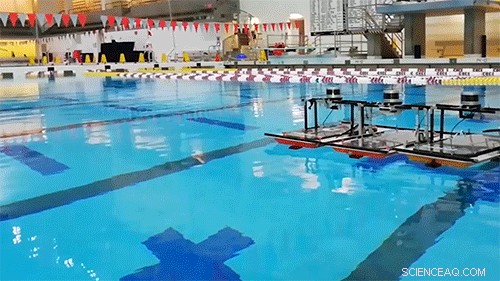
MIT's vloot van robotboten is geüpdatet met nieuwe mogelijkheden om "shapeshift, ” door autonoom los te koppelen en weer in elkaar te zetten in verschillende configuraties om verschillende drijvende platforms in de grachten van Amsterdam te vormen. Bij experimenten in een zwembad, de boten herschikten zichzelf van een verbonden rechte lijn in een "L" (hier afgebeeld) en andere vormen. Krediet:Massachusetts Institute of Technology
MIT's vloot van robotboten is geüpdatet met nieuwe mogelijkheden om "shapeshift, " door autonoom los te koppelen en weer in elkaar te zetten in verschillende configuraties, om drijvende constructies te vormen in de vele grachten van Amsterdam.
De autonome boten - rechthoekige rompen uitgerust met sensoren, stuwraketten, microcontrollers, GPS-modules, camera's, en andere hardware worden ontwikkeld als onderdeel van het lopende "Roboat"-project tussen MIT en het Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute). Het project wordt geleid door MIT-hoogleraren Carlo Ratti, Daniela Rus, Dennis Fransman, en Andrew Whittle. In de toekomst, Amsterdam wil dat de roboats over 165 kronkelende grachten varen, goederen en mensen vervoeren, afval verzamelen, of zelfmontage in 'pop-up'-platforms, zoals bruggen en podia, om de congestie in de drukke straten van de stad te helpen verlichten.
in 2016, MIT-onderzoekers testten een roboat-prototype dat vooruit kon, achteruit, en zijdelings langs een voorgeprogrammeerd pad in de grachten. Vorig jaar, onderzoekers ontwierpen goedkope, 3D-geprint, kwartschaalversies van de boten, die efficiënter en wendbaarder waren, en was uitgerust met geavanceerde algoritmen voor het volgen van banen. In juni, ze creëerden een autonoom vergrendelingsmechanisme waarmee de boten op elkaar konden richten en vastklampen, en blijf proberen als het niet lukt.
In een nieuw artikel dat vorige week werd gepresenteerd op het IEEE International Symposium on Multi-Robot and Multi-Agent Systems, de onderzoekers beschrijven een algoritme waarmee de roboats zichzelf zo efficiënt mogelijk soepel kunnen hervormen. Het algoritme handelt alle planning en tracking af waarmee groepen roboat-eenheden van elkaar kunnen worden ontgrendeld in één vaste configuratie, een botsingsvrij pad afleggen, en maak ze opnieuw vast op hun juiste plek in de nieuwe setconfiguratie.
In demonstraties in een MIT-pool en in computersimulaties, groepen gekoppelde roboat-eenheden herschikten zichzelf van rechte lijnen of vierkanten in andere configuraties, zoals rechthoeken en "L"-vormen. De experimentele transformaties duurden slechts enkele minuten. Complexere gedaanteveranderingen kunnen langer duren, afhankelijk van het aantal bewegende eenheden - dat tientallen kunnen zijn - en verschillen tussen de twee vormen.
"We hebben de roboats nu in staat gesteld verbindingen te maken en te verbreken met andere roboats, met de hoop activiteiten in de straten van Amsterdam naar het water te verplaatsen, " zegt Rus, directeur van het Computer Science and Artificial Intelligence Laboratory (CSAIL) en de Andrew en Erna Viterbi Professor of Electrical Engineering and Computer Science. "Een set boten kan samenkomen om lineaire vormen te vormen als pop-up bruggen, als we materialen of mensen van de ene kant van een kanaal naar de andere moeten sturen. Of, we kunnen bredere pop-upplatforms creëren voor bloemen- of voedselmarkten."
Deelnemen aan Rus op het papier zijn:Ratti, directeur van het Senseable City Lab van MIT, en, ook uit het laboratorium, eerste auteur Banti Gheneti, Ryan Kelly, en Drew Meyers, alle onderzoekers; postdoc Shinkyu Park; en onderzoekscollega Pietro Leoni.
Krediet:Massachusetts Institute of Technology
Botsingsvrije trajecten
Voor hun werk, moesten de onderzoekers uitdagingen aangaan met autonome planning, volgen, en het verbinden van groepen roboat-eenheden. Elke unit unieke mogelijkheden geven om, bijvoorbeeld, elkaar vinden, het eens zijn over hoe uit elkaar te vallen en te hervormen, en dan vrij rondlopen, zou complexe communicatie- en controletechnieken vereisen die beweging inefficiënt en traag zouden kunnen maken.
Om een vlottere werking mogelijk te maken, de onderzoekers ontwikkelden twee soorten eenheden:coördinatoren en arbeiders. Een of meer werknemers verbinden zich met één coördinator om een enkele entiteit te vormen, een "connected-vessel-platform" (CVP) genoemd. Alle coördinatoren en arbeiderseenheden hebben vier propellers, een draadloze microcontroller, en verschillende geautomatiseerde vergrendelingsmechanismen en detectiesystemen waarmee ze aan elkaar kunnen worden gekoppeld.
Coördinatoren, echter, zijn ook uitgerust met GPS voor navigatie, en een traagheidsmeeteenheid (IMU), die lokalisatie berekent, houding, en snelheid. Werknemers hebben alleen actuatoren die de CVP helpen om langs een pad te sturen. Elke coördinator is op de hoogte van en kan draadloos communiceren met alle aangesloten medewerkers. Structuren omvatten meerdere CVP's, en individuele CVP's kunnen aan elkaar vastklikken om een grotere entiteit te vormen.
Tijdens het veranderen van vorm, alle verbonden CVP's in een structuur vergelijken de geometrische verschillen tussen de oorspronkelijke vorm en de nieuwe vorm. Vervolgens, elke CVP bepaalt of hij op dezelfde plek blijft en of hij moet verhuizen. Elke bewegende CVP krijgt vervolgens een tijd om te demonteren en een nieuwe positie in de nieuwe vorm.
Elke CVP gebruikt een aangepaste trajectplanningstechniek om een manier te berekenen om zijn doelpositie zonder onderbreking te bereiken, terwijl u de route optimaliseert voor snelheid. Om dit te doen, elke CVP berekent vooraf alle botsingsvrije gebieden rond de bewegende CVP terwijl deze roteert en weg beweegt van een stationaire.
Na het voorberekenen van die botsingsvrije gebieden, de CVP vindt dan het kortste traject naar zijn eindbestemming, waardoor het nog steeds de stationaire eenheid niet raakt. Opmerkelijk, optimalisatietechnieken worden gebruikt om het hele trajectplanningsproces zeer efficiënt te maken, waarbij de voorberekening iets meer dan 100 milliseconden kost om veilige paden te vinden en te verfijnen. Met behulp van gegevens van de GPS en IMU, de coördinator schat vervolgens zijn houding en snelheid op het zwaartepunt, en bestuurt draadloos alle propellers van elke eenheid en beweegt naar de doellocatie.
In hun experimenten, de onderzoekers testten driedelige CVP's, bestaande uit een coördinator en twee arbeiders, in verschillende scenario's van gedaanteverwisseling. Bij elk scenario werd één CVP losgekoppeld van de oorspronkelijke vorm en verplaatst en weer gekoppeld aan een doelplek rond een tweede CVP.
Drie CVP's, bijvoorbeeld, herschikten zich van een verbonden rechte lijn - waar ze aan hun zijkanten aan elkaar waren vergrendeld - in een rechte lijn die aan de voor- en achterkant was verbonden, evenals een "L." Bij computersimulaties tot 12 roboat-eenheden herschikten zich van, zeggen, een rechthoek in een vierkant of van een massief vierkant in een Z-achtige vorm.
Opschalen
Er werden experimenten uitgevoerd op roboat-eenheden van een kwart formaat, die ongeveer 1 meter lang en een halve meter breed zijn. Maar de onderzoekers geloven dat hun trajectplanningsalgoritme goed zal schalen bij het besturen van grote eenheden, die ongeveer 4 meter lang en 2 meter breed zal meten.
Over ongeveer een jaar, de onderzoekers zijn van plan om de roboats te gebruiken om een dynamische "brug" te vormen over een 60 meter lang kanaal tussen het NEMO Science Museum in het centrum van Amsterdam en een gebied dat in ontwikkeling is. Het project, genaamd RoundAround, zal roboats inzetten om in een ononderbroken cirkel over het kanaal te varen, passagiers oppikken en afzetten bij dokken en stoppen of omleiden wanneer ze iets in de weg detecteren. Momenteel, rond die waterweg lopen duurt ongeveer 10 minuten, maar de brug kan die tijd terugbrengen tot ongeveer twee minuten.
"Dit wordt de eerste brug ter wereld die bestaat uit een vloot van autonome boten, " zegt Ratti. "Een gewone brug zou super duur zijn, omdat er boten doorvaren, dus je moet een mechanische brug hebben die opengaat of een heel hoge brug. Maar we kunnen twee kanten van het kanaal verbinden [door] autonome boten te gebruiken die dynamisch worden, responsieve architectuur die op het water drijft."
Om dat doel te bereiken, de onderzoekers ontwikkelen de roboats verder om ervoor te zorgen dat ze mensen veilig kunnen vasthouden, en zijn bestand tegen alle weersomstandigheden, zoals hevige regen. Ze zorgen er ook voor dat de roboats effectief kunnen aansluiten op de zijkanten van de grachten, die sterk kunnen variëren in structuur en ontwerp.
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 NASA kijkt op Valentijnsdag naar het hart van tropische cycloon Dineo
NASA kijkt op Valentijnsdag naar het hart van tropische cycloon Dineo- Hittegolftrends versnellen wereldwijd
- Wat de zwaartekracht van de aarde onthult over klimaatverandering
- Wetenschappers passen het METRIC-model toe om de verdamping van het landoppervlak in Nepal te schatten
- Duurzame bio-energie uit inheemse prairies op verlaten landbouwgronden
Hoofdlijnen
- Deze dans wordt uitgevoerd:honderden mannelijke kikkersoorten veranderen van kleur rond de paringstijd
- Methode stelt onderzoekers in staat lichaamsgeurmonsters van zoogdieren op een niet-invasieve manier te verzamelen
- Wat zijn de vier macromoleculen van het leven?
- Zijn mensen echt afstammelingen van apen?
- Hoe recombinatie-frequenties te berekenen
- De oorsprong van genen voor het maken van bloemen
- Door wetenschap ondersteunde manieren om een nieuwe studie te starten
- Parasitaire wormen wachten niet om te worden opgeslokt door nieuwe gastheren
- Hoe is mitose van invloed op het leven?
- Nieuw apparaat belooft lagere bedrijfskosten voor de spoorsector

- Amerikaanse senatoren dringen bij Amazon-CEO Bezos aan op antwoorden over productveiligheid

- Google steekt $ 25 miljoen op voor AI-onderzoek om de mensheid te helpen aarde

- Agentschap zoekt antiblokkeerremmen op alle nieuwe Amerikaanse racemotoren

- Hybride elektriciteitssysteem zou de tarieven verlagen, service verbeteren


 Lineaire dichtheid berekenen
Lineaire dichtheid berekenen- Een 49 kilometer hoge vulkanische askolom rees op boven de Maya-beschaving
- Het ontrafelen van het wanneer, waar en hoe van vulkaanuitbarstingen
- Hoe lang duurt het voordat piepschuim wordt afgebroken?
- Onderzoekers stellen fundamentele studie over het Kondo-effect in vraag
- Duitsland sluit illegaal datacentrum in voormalige NAVO-bunker
- Je Spotify-geschiedenis kan helpen voorspellen wat er aan de hand is met de economie
- Geneesmiddelen vormen een wereldwijd milieurisico, experts waarschuwen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
