Wetenschap
Topologie-optimalisatie en 3D-printen van magnetische actuators en displays van meerdere materialen
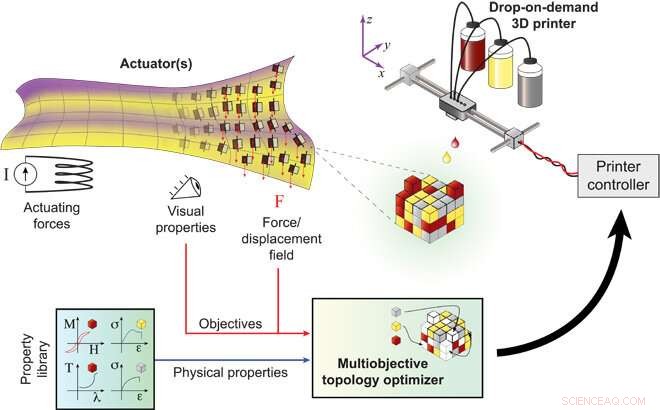
Overzicht van het specificatiegedreven 3D-printproces. De structuur van individuele actuatoren (of de opstelling van meerdere actuatoren) wordt geoptimaliseerd met behulp van een multiobjectief topologie-optimalisatieproces. Let daar op, in het algemeen, de uiteindelijke geoptimaliseerde structuur kan elke willekeurige vorm hebben, zoals weergegeven. De optimalisatie gebruikt de fysieke bulkeigenschappen van de individuele materialen en de functionele doelstellingen als input. De gegenereerde geoptimaliseerde voxel-gebaseerde weergave van de structuur wordt door de printer gebruikt om de geoptimaliseerde structuur te fabriceren met behulp van een drop-on-demand inkjetprintproces. Hierdoor kunnen hoogdimensionale ontwerpen automatisch worden gegenereerd en gefabriceerd met minimale menselijke tussenkomst. In dit werk, een stijf acrylaatpolymeer (RIG), een elastisch acrylaatpolymeer (ELA), en een magnetisch nanodeeltje (Fe3O4)/polymeercomposiet (MPC) zijn de belangrijkste gebruikte materialen. Het contrast in de optische, mechanisch, en magnetische eigenschappen worden gebruikt om tegelijkertijd het visuele uiterlijk en de bedieningskrachten te optimaliseren terwijl het ontwerp op voxel-niveau wordt gegenereerd. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaw1160
In materiaalkunde en toegepaste natuurkunde, onderzoekers verwachten dat actuatiesystemen op dezelfde manier presteren als natuurlijke fenomenen. Als klassiek voorbeeld wetenschappers stelden voor om bio-geïnspireerde materialen te ontwikkelen die de camouflage van inktvissen nabootsten, hoewel het ontwerpen van dergelijke sterk geïntegreerde systemen een uitdaging kan zijn vanwege de gecombineerde complexiteit van het genereren van hoogdimensionale architecturale ontwerpen en multifunctionele materialen die verband houden met hun fabricageproces. In een recent rapport over wetenschappelijke vooruitgang , Subramanian Sundaram en collega's in de afdelingen informatica, kunstmatige intelligentie en elektrotechniek in de VS en Frankrijk presenteerden een compleet protocol over multi-objectieve topologie-optimalisatie en multimateriaal drop-on-demand driedimensionaal (3-D) printen om complexe actuatoren te engineeren.
De actuatoren bevatten zachte en stijve polymeren gekoppeld aan een magnetisch nanodeeltje/polymeercomposiet dat reageerde op een magnetisch veld. De topologie-optimizer kan materialen toewijzen aan individuele voxels om het fysieke uiterlijk met hoge resolutie te verbeteren. Toen ze de topologie-geoptimaliseerde ontwerpstrategie verenigden met het fabricageproces van meerdere materialen, Sundaram et al. zou complexe actuatoren kunnen ontwikkelen als een veelbelovende route naar geautomatiseerde en doelgerichte fabricage.
Moderne robots hebben actuatoren nodig die meerdere functies samen in één pakket integreren voor een optimale hoogte, energie-efficiëntie, topologie, grootte en andere prestatiestatistieken. Dit idee ligt ten grondslag aan onderzoeksvoorstellen die pleiten voor een nauwe integratie van sensing, bediening en berekening met robotmaterialen. Onderzoekers debatteren nog steeds of robots lichamen met hersenen of hersenen met lichamen zullen zijn en daarom moet er nog een onderscheid worden gemaakt tussen materialen en machines. Het nieuwe paradigma met robotmaterialen vereist dat robotonderdelen worden ontworpen voor meerdere functies en worden geoptimaliseerd voor meerdere doelen, zoals bij natuurlijke organismen.
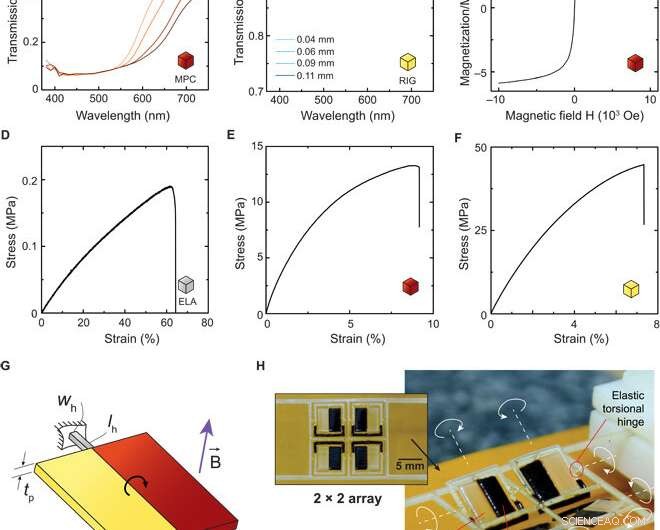
Materiaaleigendom bibliotheek. (A) De transmissie door de MPC weergegeven als een functie van de golflengte voor films van verschillende dikte, gemeten met een spectrofotometer. (B) De transmissie door het heldere, stijve materiaal weergegeven als een functie van de golflengte voor meerdere filmdiktes. (C) Magnetisatie versus toegepast magnetisch veld voor de MPC gemeten bij kamertemperatuur. Magnetische nanodeeltjes vormen ∼12% van het totale gewicht van de MPC. Typische mechanische spanning-rekcurves voor de ELA, MPC, en het stijve polymeer (RIG) worden getoond in (D) tot (F), respectievelijk. Elastische moduli van de polymeren bij lineaire spanningen, gemiddeld uit drie steekproeven elk, aanzienlijk variëren—ELA (528 kPa), MPC (507 MPa), en RIG (1290 MPa). (G) Het schema toont het fundamentele op scharnieren gebaseerde ontwerp met paneellengte lp en dikte tp. Bij dit ontwerp is het paneel is verdeeld in twee gelijke delen van RIG en MPC. Het paneel is aan twee zijden bevestigd aan starre begrenzingen met ELA torsiescharnieren van lengte lh, breedte wat, en dikte th. Bij het aanleggen van een magnetisch veld, het magnetische gedeelte van het paneel genereert een koppel. Dit wordt gebruikt als het fundamentele blok in de handmatig ontworpen monsters. (H) Afbeelding van een 2 × 2 reeks panelen met elk twee rotatieassen. De donkerbruine delen van de afbeelding tonen het MPC-materiaal, en de doorschijnende delen tonen de stijve materialen. De elastische torsiescharnieren zijn qua uiterlijk bijna identiek aan het stijve polymeer. Bij het aanleggen van een magnetisch veld, elk paneel vertoont een unieke combinatie van hoekrotaties over twee assen. Het bovenaanzicht van het platte, zoals afgedrukte monster wordt links getoond. (Fotocredit:S.S. en D.S.K., MIT.) Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaw1160
De uitdaging met het reproduceren van bio-geïnspireerde multifunctionele systemen blijft bij het ontwerp van bedieningssystemen. In het klassieke voorbeeld van een bedieningssysteem van een inktvis, de gelijktijdige controle van zowel fysieke doorbuigingen als uiterlijk met hoge resolutie resulteert in effectieve biologische camouflage. Het reproduceren van een dergelijke naadloos geïntegreerde bediening in het laboratorium is omslachtig vanwege de complexiteit bij het creëren van een hoogdimensionale ontwerpruimte en het fabriceren van deze ontwerpen met nieuwe materialen en vrije-vormgeometrieën.
In hedendaagse voorbeelden van bedieningssystemen, materiaalwetenschappers hebben een digitaal microspiegelapparaat ontwikkeld met miljoenen identieke actuatoren en een 'duizendpoot'-systeem voor gegevensopslag met hoge dichtheid en cantilevers van het micro-elektromechanische systeem. Het optimaliseren van deze aandrijfsystemen voor stroomverbruik, lage footprint en procesbetrouwbaarheid zijn tijdrovend, terwijl niet-uniforme actuatorarrays extra complexiteit gaven in het laboratorium. Als veelbelovend alternatief topologie-optimalisatietechnieken bieden automatisch geoptimaliseerde materiaallay-outs in een bepaalde ontwerpruimte.
In het huidige werk, Sundaram et al. gebruikte een gesimuleerde gloeistrategie die eerder werd gebruikt als een succesvolle topologie-optimalisatiebenadering voor het ontwerpen van truss-structuren. Hoewel erg generiek in theorie, de aanpak hield rekening met specifieke kenmerken van het probleem om in de praktijk effectief te zijn. In de huidige aanpak is Sundaram et al. rekening gehouden met de rol van de materialen, waar de techniek volledig fabricage bewust was. De voorgestelde studie over een hoge resolutie, multifysica en fabricagebewust topologie-optimalisatieraamwerk is een eerste strategie die in dit werk wordt geïmplementeerd.
De wetenschappers gebruikten een precisiefabricageproces dat in staat is om hoogdimensionale ontwerpen te verwerken om de synthetische actuator te fabriceren. Daarna, ze kozen voor een snelle additieve 3D-productiebenadering voor de fabricage van actuatoren om nauwkeurige, complexe constructies met diverse materialen. De toenemende belangstelling voor 3D-geprinte actuatoren is te danken aan hun snelheid en toepasbaarheid in robotica op micro-/mesoschaal.
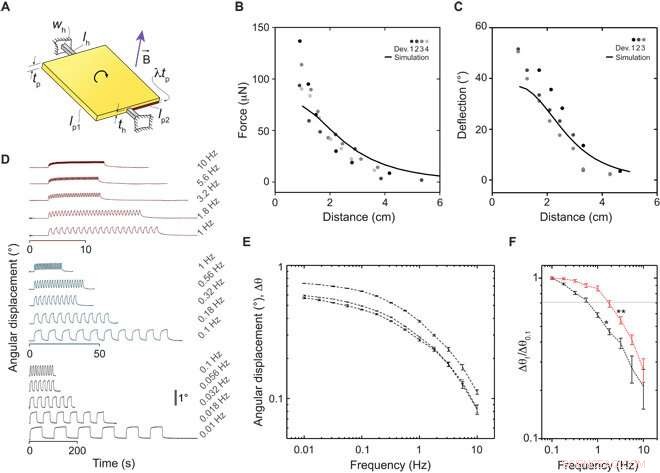
Actuatorkenmerken - Krachten, verplaatsingen, en activeringsbandbreedte. (A) Om de prestaties van de actuator te karakteriseren, de wetenschappers gebruikten het fundamentele ontwerp met een kleine verandering. Hier, slechts een fractie van de plaatdikte, tp, is gevuld met MPC, aangeduid met . De volgende resultaten werden verkregen met een rechthoekig paneel met de afmetingen lp1 × lp2 =8 mm × 9 mm, dikte tp =1 mm, λ =0,15, en scharnieren met afmetingen Wh =0,5 mm, lh =1 mm, en d =0,25 mm. (B) Gemeten blokkerende krachten van vier identieke apparaten weergegeven als een functie van de afstand van de 2″ bij 2″ bij 0,5″ magneet samen met de bijbehorende simulatieresultaten. (C) Gemeten hoekafwijkingen van drie identieke apparaten als functie van de afstand tot de magneet. (D) Optisch gevolgde hoekverplaatsingen als functie van de tijd voor bediening bij frequenties van 0,01 tot 10 Hz. (E) Hoekverplaatsingsamplitudes als functie van de frequentie voor drie apparaten. (F) De schijnbare bandbreedte met grote amplitude hangt af van de instelling van het magnetische veld, aangezien de kracht die door de actuator zelf wordt ervaren, varieert met de verplaatsing. Dit wordt in deze plot benadrukt met twee gevallen - in één geval de kracht die door de actuator wordt ervaren, neemt monotoon toe met hoekverplaatsing (⋆), en in het andere geval er is een stabiele hoekverplaatsing wanneer het paneel uitgelijnd is met de richting van de maximale helling (⋆⋆). Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaw1160
Wetenschappers hadden eerder de eigenschap van magnetische aandrijving voor zachte materie onderzocht vanwege gunstige schaling, hoge bedieningskrachtdichtheid en ongebonden bediening. Sundaram et al. verenigde een biomimetische evolutionaire optimalisatietechniek met een geautomatiseerd additief productieproces voor meerdere materialen om snel hoogdimensionale actuatoren te ontwerpen en te fabriceren in het huidige werk. De aanpak zou uiteindelijk volledig geautomatiseerde fabricage van hoogdimensionale ontwerpen mogelijk kunnen maken, wat een langetermijndoel is in robotica.
De onderzoekers implementeerden het aangepaste drop-on-demand 3D-printproces om de hele fabricagepijplijn te optimaliseren en fabricagebewuste verbeteringen uit te voeren. Ze ontwierpen een specifieke actuator in een vlakke, stijve structuur met synthetische cellen gevuld met een transparant stijf polymeer of een donker magnetisch responsief polymeer. De topologie-optimizer regelde de plaatsing van de twee materialen ten opzichte van hun materiaaleigenschappen voor optimale toepassingen. Sundaram et al. combineerde vervolgens een aangepast multimateriaal drop-on-demand 3D-printproces met multi-objectieve topologie-optimalisatie om de hoogdimensionale actuatorontwerpen in het laboratorium te ontwikkelen. Ze creëerden een set ultraviolet (UV)-uithardbare inkten met een verscheidenheid aan effecten, waaronder optische, magnetische en mechanische eigenschappen, karakteriseerde vervolgens de monsters om een eigenschappenbibliotheek te genereren.
De bedrukte waterlelie wordt op vloeistofgrensvlakken geplaatst en aangedreven met een permanente magneet. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaw1160
De wetenschappers gebruikten een op maat gemaakte inkjet-gebaseerde multimateriaal 3D-printer. Ze gebruikten een stijf acrylaatpolymeer (RIG), een elastisch acrylaatpolymeer (ELA) en een magnetisch nanodeeltjespolymeercomposiet (MPC) naast geoptimaliseerde startinkten voor het inkjetprintproces. Na inktafzetting, ze gebruikten een UV-light-emitting diode (LED) -array om de inkt te verknopen via fotopolymerisatie met vrije radicalen. De drie materialen bevatten sterk variërende elastische moduli en materiaaleigenschappen waardoor ze zachte verbindingen en stijve structuren konden maken voor gebruik als actuatoren. De wetenschappers demonstreerden hun capaciteiten en vervaardigden een verscheidenheid aan actuatorarrays uit meerdere materialen zoals handmatig ontworpen. Ze hebben de ontworpen en geconstrueerde actuatoren gedurende ten minste 1000 cycli gefietst zonder prestatieverlies.
Sundaram et al. onderzocht de toepassingen van 3D-geprinte, op multimateriaal gebaseerde zachte magnetische actuatoren met behulp van een elektromagneet die wordt aangedreven door een stroombron om een afstembaar magnetisch veld te genereren. Als proof-of-concept, ze ontwikkelden vier individuele bloembladen voor magnetische activering op een lucht-waterinterface, waar de bloembladen uit de watergrens kwamen. Voor herhaalbare bediening, ze plaatsten de afgedrukte monsters op een siliconenolie-water-interface. Deze handmatig ontworpen voorbeelden waren een primeur om additieve fabricage van meerdere materialen in combinatie met magnetische activering te benadrukken. De strategie integreerde naadloos afdrukken van meerdere materialen en topologie-optimalisatie om unieke, optische eigenschappen met hoge resolutie.
Topologie-optimalisatie van actuatoren. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaw1160
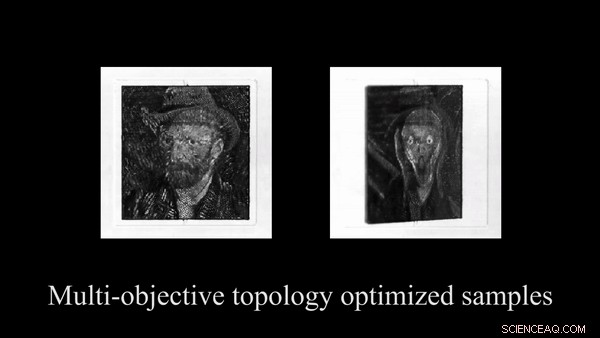
De wetenschappers optimaliseerden multi-objectieve topologie met behulp van simulatiesoftware om de distributie van de MPC-cellen (Magnetic Nanoparticle Polymeer Composiet) voor magnetische activering te begrijpen. Vervolgens pasten ze de methode toe op twee verschillende afbeeldingen van schilderijen, waaronder een zelfportret van Van Gogh en de 'Schreeuw' van Munch. Na het toepassen van het topologie-optimalisatieraamwerk, ze regelden magnetische activering met een toegepast magnetisch veld om afbeeldingen geleidelijk van het Van Gogh- naar het Munch-portret over te zetten door de kantel- / afbuighoeken te vergroten. De wetenschappers karakteriseerden vervolgens de voor topologie geoptimaliseerde actuator met langetermijntests.
Op deze manier, Subramanian Sundaram en collega's ontwikkelden een topologie-optimizer die past bij de optische eigenschappen van het doelwit en de kantelhoeken. De wetenschappers koppelden bovendien een drop-on-demand inkjet-gebaseerd 3D-printen aan de optimalisatietechniek om topologie-geoptimaliseerde ontwerpen te ontwikkelen en optische eigenschappen met hoge resolutie te genereren. Hoewel er uitdagingen bestaan bij de ontwikkeling van nieuwe inkten en materialen, ze konden een breed scala aan materialen fabriceren met behulp van het proces.
De onderzoekers kunnen de volledige fabricagepijplijn ontwerpen voor meer controlevrijheid met fabricagebewuste optimalisatie. De voor topologie geoptimaliseerde actuator en de bijbehorende fabricagetoolkit kunnen worden gebruikt om actuatoren met sensoren en elementaire computerelementen te ontwerpen om de lang gekoesterde visie van multifunctionele robotische/autonome composieten met grootschalige integratie en zelfvoorziening te verwezenlijken. Wanneer wetenschappers deze fundamentele strategieën verder onderzoeken, ze zullen multifunctionele actuatoren kunnen vormen met minimale menselijke tussenkomst.
© 2019 Wetenschap X Netwerk
 Proces verwijdert tegelijkertijd giftige metalen en zout om schoon water te produceren
Proces verwijdert tegelijkertijd giftige metalen en zout om schoon water te produceren- Een rubberei maken als wetenschappelijk experiment
- De milieukosten van contactlenzen
- Een intelligente, vormveranderend, zelfherstellend materiaal voor geïntegreerd kunstspier- en zenuwweefsel
- Het percentage opbrengst
Hoofdlijnen
- Vertaling (biologie): definitie, stappen, diagram
- Wat is de afbraak van mRNA?
- Onderzoek suggereert vrouwelijk voordeel in levensverwachting gerelateerd aan fundamentele biologische wortels
- Nieuwe studie benadrukt de effecten van een wereldwijde strategie om de antibioticaconsumptie in de productie van voedseldieren te verminderen
- Europarlementariërs dringen aan op onderzoek naar Monsantos heerschappij over veiligheidsstudies
- De structuur en functie van spiercellen
- Wetenschappers werken samen aan onderzoek om bedreigde Afrikaanse pinguïns te redden
- De primaire primaire productiviteit berekenen
- Wat zijn de chemische zintuigen?
- Kunstmatige intelligentie:ARC-testfocus gaat verder dan feitenvragen

- Google-advertenties:effectief, een beetje frustrerend, bedrijven zeggen:

- Groep achter Facebooks Weegschaalmunt kondigt 21 oprichters aan

- Het drielichamenprobleem sneller oplossen met een diep neuraal netwerk

- Expert zegt dat Brexit-campagne gebruikmaakte van gegevens die van Facebook waren gedolven


 Leefstijlmigranten brengen goede bedoelingen - maar grote verandering - naar Costa Rica
Leefstijlmigranten brengen goede bedoelingen - maar grote verandering - naar Costa Rica- Onderzoek suggereert dat de manosfeer giftiger wordt
- Hoe het water in een put te meten door stenen te laten vallen
- Behoud van veengebieden essentieel voor klimaat
- Nanowalls voor smartphones
- Ingenieurs creëren nieuw ontwerp voor ultradunne capacitieve sensoren
- Waarom komt de aarde blauw uit de ruimte?
- Moment van de waarheid op belangrijke VN-klimaattop
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
