Wetenschap
Ogen voor de stuurautomaat:succesvolle automatische landing met vision-ondersteunde navigatie

Krediet:Andreas Dekiert / C2Land
Automatische landingen zijn lange tijd de standaardprocedure geweest voor commerciële vliegtuigen. Hoewel grote luchthavens over de nodige infrastructuur beschikken om de veilige navigatie van het vliegtuig te garanderen, op kleinere luchthavens is dit meestal niet het geval. Onderzoekers van de Technische Universiteit van München (TUM) en TU Braunschweig hebben nu een volledig automatische landing gedemonstreerd met vision-ondersteunde navigatie die goed functioneert zonder de noodzaak van grondgebaseerde systemen.
Op grote luchthavens maakt het Instrument Landing System (ILS) het mogelijk voor commerciële vliegtuigen om met grote precisie automatisch te landen. Antennes sturen radiosignalen naar de stuurautomaat om ervoor te zorgen dat deze veilig naar de startbaan navigeert. Er worden momenteel ook procedures ontwikkeld die automatische landing mogelijk maken op basis van satellietnavigatie. Ook hier is een grondgebonden augmentatiesysteem vereist.
Echter, dergelijke systemen zijn niet beschikbaar voor de algemene luchtvaart op kleinere luchthavens, wat een probleem is bij slecht zicht - dan kunnen vliegtuigen gewoon niet vliegen. "Automatisch landen is essentieel, vooral in de context van de toekomstige rol van de luchtvaart, " zegt Martin Kügler, onderzoeksmedewerker bij de TUM Chair of Flight System Dynamics. Dit geldt bijvoorbeeld wanneer geautomatiseerde vliegtuigen vracht vervoeren en natuurlijk wanneer passagiers geautomatiseerde vliegende taxi's gebruiken.
Op camera's gebaseerd optisch referentiesysteem
In het project "C2Land, " gesteund door de Duitse federale regering, TUM-onderzoekers werken samen met Technische Universität Braunschweig om een landingssysteem te ontwikkelen waarmee kleinere vliegtuigen kunnen landen zonder hulp van grondsystemen.

Credit:TU Braunschweig
De stuurautomaat gebruikt GPS-signalen om te navigeren. Het probleem:GPS-signalen zijn gevoelig voor meetonnauwkeurigheden, bijvoorbeeld door atmosferische storingen. De GPS-ontvanger in het vliegtuig kan dergelijke storingen niet altijd betrouwbaar detecteren. Als resultaat, De huidige GPS-naderingsprocedures vereisen dat de piloten de controle overnemen op een hoogte van maar liefst 60 meter en het vliegtuig handmatig landen.
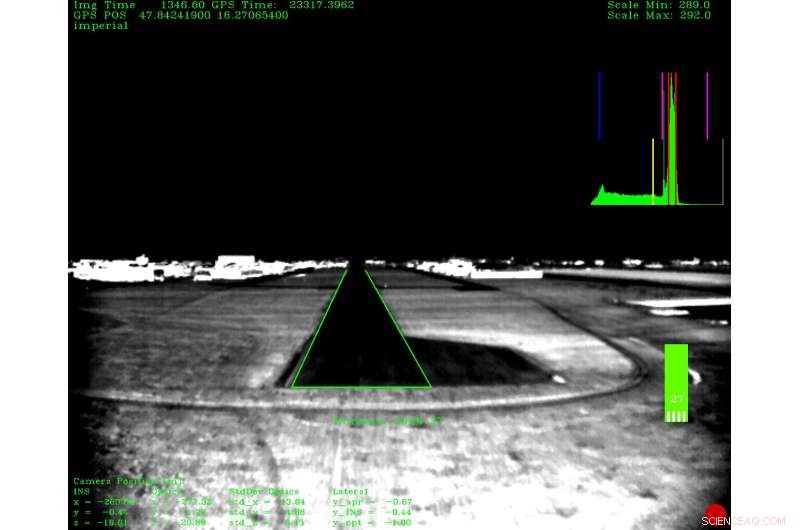
Om volledig geautomatiseerde landingen mogelijk te maken, het TU Braunschweig-team ontwierp een optisch referentiesysteem:een camera in het normale zichtbare bereik en een infraroodcamera die ook onder omstandigheden met slecht zicht gegevens kan leveren. De onderzoekers ontwikkelden op maat gemaakte beeldverwerkingssoftware waarmee het systeem kan bepalen waar het vliegtuig zich bevindt ten opzichte van de landingsbaan op basis van de cameragegevens die het ontvangt.
TUM-onderzoeksvliegtuig beschikt over Fly-by-Wire-systeem
Het TUM-team ontwikkelde het volledige automatische besturingssysteem van TUM's eigen onderzoeksvliegtuig, een gemodificeerde Diamond DA42. Het vliegtuig is uitgerust met een Fly-by-Wire-systeem dat de besturing mogelijk maakt door middel van een geavanceerde automatische piloot, ook ontwikkeld door de TUM-onderzoekers.
Credit:TU Braunschweig
Om automatische landingen mogelijk te maken, extra functies werden geïntegreerd in de software, zoals het vergelijken van gegevens van de camera's met GPS-signalen, berekening van een virtueel glijpad voor de landingsnadering en vluchtcontrole voor verschillende fasen van de nadering.
Succesvolle landing in Wiener-Neustadt
Eind mei kon het team meekijken hoe het onderzoeksvliegtuig een volledig automatische landing maakte op het Diamond Aircraft-vliegveld. Testpiloot Thomas Wimmer is volledig overtuigd van het landingssysteem:"De camera's herkennen de baan al op grote afstand van de luchthaven. Het systeem leidt het vliegtuig vervolgens volledig automatisch door de landingsnadering en landt het precies op de hartlijn van de baan ."
 Proton vaste oxide elektrolytische cel vergemakkelijkt niet-geoxideerde dehydrogenering van ethaan
Proton vaste oxide elektrolytische cel vergemakkelijkt niet-geoxideerde dehydrogenering van ethaan- Hoe Magnesiumchloride op te lossen
- Wetenschappers ontwikkelen nieuwe transparante breedband afschermende materialen voor elektromagnetische interferentie
- Kooldioxide omzetten in koolmonoxide met behulp van water, elektriciteit
- Hoe Red Phosphorus te verkrijgen
- Koraalriffen in heet water als opwarmingsgebeurtenissen het herstel vertragen
- Aardwetenschappers roepen op tot preventie- en waarschuwingssystemen voor overstromingen in de Himalaya
- De aardbeving in Kaikoura kan ertoe leiden dat de modellen voor aardbevingsgevaar internationaal worden heroverwogen
- Commentaar:Het boomlandschap van Golden State is niet gemaakt om lang mee te gaan
- Het traceren van de geschiedenis van de landbouw in heel Afrika geeft aanwijzingen voor lage productie-outputs
Hoofdlijnen
- Cytoplasma bacteriecellen
- Aanvallen van rupsen zorgen ervoor dat bladluizen planten kunnen besluipen
- Hoe een zevende-graadsmodel van een dierencel te bouwen
- Genetische modificatie: definitie, soorten, proces, voorbeelden
- Wat worden clusters van cellichamen genoemd?
- Do All Cells Have Mitochondria?
- Welke moleculen kunnen zonder hulp door het plasmamembraan gaan?
- Caribische bidsprinkhanen hebben een oude Afrikaanse oorsprong
- Pizza-nachtmerries:kan uw dieet uw dromen bepalen?
- Coronavirus-tracking-app die privacy voorop stelt

- Snelgroeiend web van deurbelcamera's wekt angst voor privacy

- Kijken voor werk? Je volgende sollicitatiegesprek komt misschien gewoon per sms

- Milieuvriendelijke en efficiënte propaanwarmtepomp

- Kunstmatige intelligentie gebruiken om leemten in oude teksten op te vullen

 Molecuul valt coronavirus op een nieuwe manier aan
Molecuul valt coronavirus op een nieuwe manier aan- Huilende olifanten en giechelende ratten - dieren hebben gevoelens, te
- De ongerepte stranden van Australië hebben een poepprobleem
- De fine-tuning van tweedimensionale materialen
- Meningsverschillen helpen de teamperceptie, studie vondsten
- Op weg naar een betere batterij:wetenschappers ontdekken de bron van degradatie in natriumbatterijen
- Nieuw beschikbare GPS-gegevens helpen wetenschappers de ionosfeer beter te begrijpen
- Studie:COVID-19 creëert een nieuwe marktplaats voor contractfraude
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | French |

-
Wetenschap © https://nl.scienceaq.com
