Wetenschap
Robots helpen herinneren:hyperdimensionale computertheorie kan de manier waarop AI werkt veranderen
Het laboratorium van de onderzoekers, zoals gezien door de dynamische zichtsensor. Krediet:Perception en Robotics Group, Universiteit van Maryland.
José Altuve van de Houston Astros komt op de plaat met een 3-2 telling, bestudeert de werper en de situatie, krijgt groen licht vanaf het derde honk, volgt het loslaten van de bal, zwaait ... en krijgt een single in het midden. Gewoon weer een trip naar de plaat voor de drievoudig slagkampioen van de American League.
Kan een robot in dezelfde situatie een klap krijgen? Onwaarschijnlijk.
Altuve heeft natuurlijke reflexen aangescherpt, Jarenlange ervaring, kennis van de neigingen van de werper, en een goed begrip van de trajecten van verschillende toonhoogtes. Wat hij ziet, hoort, en voelt naadloos samen met zijn hersen- en spiergeheugen om de swing te timen die de hit produceert. De robot, anderzijds, moet een koppelingssysteem gebruiken om de gegevens van zijn sensoren langzaam te coördineren met zijn motorische capaciteiten. En het kan zich niets herinneren. Sla drie!
Maar er is misschien hoop voor de robot. Een paper van onderzoekers van de Universiteit van Maryland die zojuist in het tijdschrift zijn gepubliceerd Wetenschap Robotica introduceert een nieuwe manier om waarneming en motorische commando's te combineren met behulp van de zogenaamde hyperdimensionale computertheorie, die de fundamentele kunstmatige intelligentie (AI) -taak van sensorimotorische representatie fundamenteel zou kunnen veranderen en verbeteren - hoe agenten zoals robots vertalen wat ze voelen in wat ze doen.
"Learning Sensorimotor Control with Neuromorphic Sensors:Toward Hyperdimensional Active Perception" is geschreven door informatica Ph.D. studenten Anton Mitrokhin en Peter Sutor, jr.; Cornelia Fermuller, een associate research scientist bij de University of Maryland Institute for Advanced Computer Studies; en professor computerwetenschappen Yiannis Aloimonos. Mitrokhin en Sutor worden geadviseerd door Aloimonos.
Integratie is de belangrijkste uitdaging op het gebied van robotica. De sensoren van een robot en de actuatoren die hem bewegen zijn afzonderlijke systemen, met elkaar verbonden door een centraal leermechanisme dat een noodzakelijke actie afleidt op basis van sensorgegevens, of vice versa.
Het omslachtige driedelige AI-systeem - elk onderdeel spreekt zijn eigen taal - is een langzame manier om robots sensomotorische taken te laten uitvoeren. De volgende stap in robotica zal zijn om de waarnemingen van een robot te integreren met zijn motorische capaciteiten. Deze fusie, bekend als "actieve waarneming, " zou de robot een efficiëntere en snellere manier bieden om taken uit te voeren.
In de nieuwe computertheorie van de auteurs, het besturingssysteem van een robot zou gebaseerd zijn op hyperdimensionale binaire vectoren (HBV's), die bestaan in een schaarse en extreem hoogdimensionale ruimte. HBV's kunnen verschillende discrete dingen vertegenwoordigen, bijvoorbeeld een enkele afbeelding, een concept, een geluid of een instructie; sequenties die uit discrete dingen bestaan; en groeperingen van discrete dingen en sequenties. Ze kunnen al deze soorten informatie op een zinvol geconstrueerde manier verantwoorden, elke modaliteit samenbinden in lange vectoren van enen en nullen met gelijke dimensie. In dit systeem, actie mogelijkheden, zintuiglijke input en andere informatie nemen dezelfde ruimte in beslag, zijn in dezelfde taal, en zijn gefuseerd, het creëren van een soort geheugen voor de robot.
De Wetenschap Robotica papier markeert de eerste keer dat perceptie en actie zijn geïntegreerd.
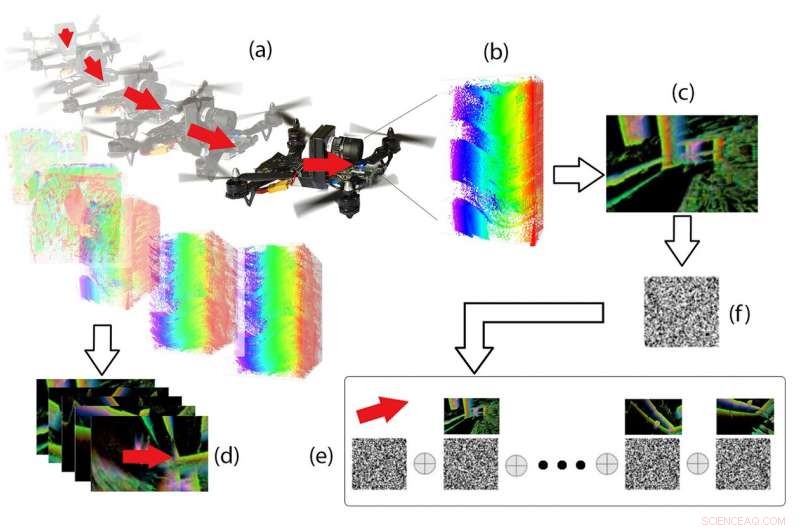
Hyperdimensionale pijplijn. Uit de gebeurtenisgegevens (b) opgenomen op de DVS tijdens dronevlucht (a), "gebeurtenisbeelden" (c) en 3D-bewegingsvectoren (d) worden berekend, en beide worden gecodeerd als binaire vectoren en in het geheugen gecombineerd via speciale vectorbewerkingen (e). Gegeven een nieuwe gebeurtenisafbeelding (f), de bijbehorende 3D-beweging kan uit het geheugen worden opgeroepen. Krediet:Perception en Robotics Group, Universiteit van Maryland.
Een hyperdimensionaal raamwerk kan elke reeks "momenten" veranderen in nieuwe HBV's, en groepeer bestaande HBV's samen, allemaal in dezelfde vectorlengte. Dit is een natuurlijke manier om semantisch significante en geïnformeerde 'herinneringen' te creëren. De codering van steeds meer informatie leidt op zijn beurt tot "geschiedenis" -vectoren en het vermogen om te onthouden. Signalen worden vectoren, indexeren vertaalt zich naar geheugen, en leren gebeurt door middel van clustering.
De herinneringen van de robot aan wat hij in het verleden heeft gevoeld en gedaan, kan ertoe leiden dat hij toekomstige waarnemingen verwacht en zijn toekomstige acties beïnvloedt. Deze actieve waarneming zou de robot in staat stellen om autonomer te worden en taken beter uit te voeren.
"Een actieve waarnemer weet waarom hij wil voelen, kiest dan wat te zien, en bepaalt hoe, wanneer en waar de perceptie te bereiken, " zegt Aloimonos. "Het selecteert en fixeert op scènes, momenten in de tijd, en afleveringen. Dan stemt het zijn mechanismen af, sensoren, en andere componenten om te handelen naar wat het wil zien, en selecteert gezichtspunten van waaruit het beste vast te leggen wat het van plan is."
"Ons hyperdimensionaal raamwerk kan elk van deze doelen adresseren."
Toepassingen van het onderzoek in Maryland zouden veel verder kunnen gaan dan robotica. Het uiteindelijke doel is om AI op een fundamenteel andere manier zelf te kunnen doen:van concepten tot signalen tot taal. Hyperdimensionale computing zou een sneller en efficiënter alternatief model kunnen bieden voor het iteratieve neurale netwerk en deep learning AI-methoden die momenteel worden gebruikt in computertoepassingen zoals datamining, visuele herkenning en het vertalen van afbeeldingen naar tekst.
"Neurale netwerkgebaseerde AI-methoden zijn groot en traag, omdat ze het zich niet kunnen herinneren, " zegt Mitrokhin. "Onze hyperdimensionale theoriemethode kan herinneringen creëren, waarvoor veel minder rekenwerk nodig is, en zou dergelijke taken veel sneller en efficiënter moeten maken."
Betere bewegingsdetectie is een van de belangrijkste verbeteringen die nodig zijn om de detectie van een robot te integreren met zijn acties. Het gebruik van een dynamische zichtsensor (DVS) in plaats van conventionele camera's voor deze taak was een belangrijk onderdeel van het testen van de hyperdimensionale computertheorie.
Digitale camera's en computervisietechnieken leggen scènes vast op basis van pixels en intensiteiten in frames die alleen 'in het moment' bestaan. Ze vertegenwoordigen beweging niet goed omdat beweging een continue entiteit is.
Een DVS werkt anders. Het maakt geen "foto's" in de gebruikelijke zin, maar toont een andere constructie van de werkelijkheid die geschikt is voor de doeleinden van robots die beweging moeten aanpakken. Het vat het idee van het zien van beweging, vooral de randen van objecten als ze bewegen. Ook bekend als een "silicium retina, " deze sensor, geïnspireerd op het gezichtsvermogen van zoogdieren, registreert asynchroon de veranderingen van verlichting die optreden bij elke DVS-pixel. De sensor is geschikt voor een groot aantal lichtomstandigheden, van donker naar helder, en kan zeer snelle bewegingen met een lage latentie oplossen - ideale eigenschappen voor realtime toepassingen in robotica, zoals autonome navigatie. De gegevens die het verzamelt, zijn veel beter geschikt voor de geïntegreerde omgeving van de hyperdimensionale computertheorie.
Een DVS registreert een continue stroom van gebeurtenissen, waarbij een gebeurtenis wordt gegenereerd wanneer een individuele pixel een bepaalde vooraf gedefinieerde verandering in de logaritme van de lichtintensiteit detecteert. Dit wordt bereikt door analoge circuits die op elke pixel zijn geïntegreerd, en elke gebeurtenis wordt gerapporteerd met de pixellocatie en het tijdstempel van de nauwkeurigheid van een microseconde.
"De gegevens van deze sensor, de gebeurteniswolken, zijn veel schaarser dan reeksen afbeeldingen, " zegt Cornelia Fermüller, een van de auteurs van het Science Robotics paper. "Verder, de gebeurteniswolken bevatten de essentiële informatie voor het coderen van ruimte en beweging, conceptueel de contouren in de scène en hun beweging."
Segmenten van gebeurteniswolken worden gecodeerd als binaire vectoren. Dit maakt de DVS een goed hulpmiddel voor het implementeren van de theorie van hyperdimensionaal computergebruik voor het samensmelten van perceptie met motorische vaardigheden.
Een DVS ziet schaarse gebeurtenissen in de tijd, het verstrekken van uitgebreide informatie over veranderingen in een scène, en het mogelijk maken van nauwkeurige, snelle en schaarse waarneming van de dynamische aspecten van de wereld. Het is een asynchrone differentiële sensor waarbij elke pixel fungeert als een volledig onafhankelijk circuit dat de intensiteitsveranderingen van licht volgt. Wanneer het detecteren van beweging echt het soort zicht is dat nodig is, de DVS is de tool bij uitstek.
 Blauw licht betekent grote vooruitgang voor op perovskiet gebaseerde leds
Blauw licht betekent grote vooruitgang voor op perovskiet gebaseerde leds- Moleculen maken die fonkelen
- Wat bepaalt de viscositeit van een vloeistof?
- Zelfgebouwde gevouwen macrocycles maken met lage symmetrie
- Goedkoop, energiezuinige aanpak voor de behandeling van met zware metalen verontreinigd water
- Zeespiegelstijging versnelt terwijl de Groenlandse ijskap recordhoeveelheid verliest
- Universiteiten geven resultaten vrij over stikstofvoetafdruk
- Het scheepsverkeer daalde tijdens de eerste maanden van de COVID-pandemie
- Maïsethanol vermindert de ecologische voetafdruk, broeikasgassen
- Gemeenschappelijke North Dakota Spiders
Hoofdlijnen
- Pareidolie:waarom we in bijna alles gezichten zien
- Verschrikkelijke sneeuwman? Nee - studie koppelt DNA-monsters van vermeende Yeti's aan Aziatische beren
- Wetenschap zet nog een stap in het wissen van pijnlijke herinneringen
- Hoe ver ben je van de boom gevallen? Wetenschappers schatten de mutatiesnelheid van chimpanseeouders tot hun nakomelingen
- Dit is het seizoen om waakzaam te zijn:het risico op chocoladevergiftiging bij honden piekt met Kerstmis
- DNA is digitaal geworden - wat kan er mis gaan?
- De ontwerpprincipes van celcompartimenten blootleggen
- Voordelen en nadelen van Hydrostatic Skeleton
- Grootte doet er niet toe - althans voor hamerhaaien en zwemprestaties
- Persoonlijke informatie over meer dan 3, 000 Ring-eigenaren naar verluidt gecompromitteerd

- Hoe AI je kan helpen gebarentaal te leren

- Facebook zegt dat het News Corp-verhalen zal leveren

- Netflix versnelt groei terwijl streaming tv-oorlog opdoemt

- WhatsApp verbiedt Europese jongeren tot 16 jaar om app te gebruiken


 NASA kiest CubeSat, SmallSat missie concept studies
NASA kiest CubeSat, SmallSat missie concept studies- Wetenschappers reconstrueren ruimtegeschiedenis met oude teksten
- De privacyrisico's van het verzamelen van mobiliteitsgegevens
- Hoe het Jeruzalem-syndroom werkt
- Wetenschappers snijden nanodraden uit dunne ultrananokristallijne diamantfilms
- Curiosity Rover gaat tijdelijk van brein wisselen
- Panasonic stopt met productie van lcd-schermen
- Nieuwe koolstoffilms verbeteren de vooruitzichten voor apparaten op zonne-energie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
