Wetenschap
Wetenschappers introduceren nieuw perspectief in robotvermogen
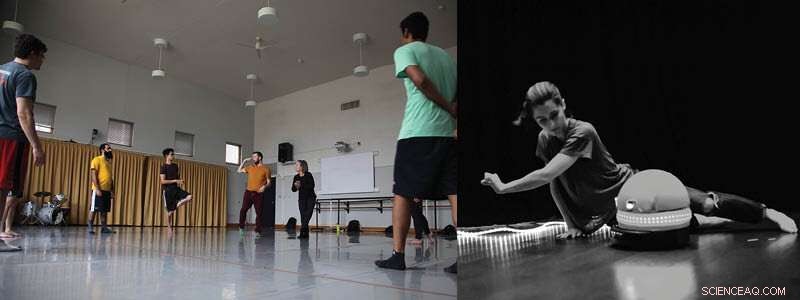
Foto links:Embodied practice in het RAD Lab onder leiding van Riley Watts (midden); foto door Catie Cuan. Foto rechts:artistieke praktijk in het RAD Lab door een uitvoering van "Time to Compile" aan Brown University Credit:Keira Heu-Jwyn Chang.
Amy LaViers, onderzoeker van de Universiteit van Illinois, heeft in haar paper een nieuw gezichtspunt geïntroduceerd om robotcapaciteiten te observeren. "Aantal mechanische, Externe configuraties vergeleken met computationele, Interne configuraties in natuurlijke en kunstmatige systemen, " vandaag gepubliceerd in PLOS EEN , een toonaangevend interdisciplinair onderzoekstijdschrift.
LaViers leidt de Robotica, Automatisering, en Dans (RAD) Lab, die gespecialiseerd is in de ontwikkeling van expressieve robotsystemen. Typisch, robots zijn bedoeld om een of andere vorm van natuurlijke beweging of actie na te bootsen. In industriële omgevingen zoals productie- of magazijnvoorraad, robots presteren doorgaans veel beter met een hogere nauwkeurigheid, precisie, en lagere kosten in de loop van de tijd. In meer dynamische situaties echter, natuurlijke systemen hebben meer kans om beter te presteren dan een robot. Het uitvoeren van gecontroleerde taken, bijvoorbeeld, veel van wat je in een magazijn ziet, gemakkelijk kan worden gekwantificeerd, maar als het gaat om de meer complexe situaties, is er geen goede manier om dit te doen. LaViers' paper introduceert een vereenvoudigd telmodel dat een numeriek perspectief biedt om de expressieve mogelijkheden van robots en natuurlijke wezens te vergelijken. Dit is een onderwerp dat in het RAD Lab wordt verkend door interdisciplinaire samenwerking met kunstenaars en de somatische praktijk.
Bij computergebruik zijn er veel variabelen die invloed hebben op de kracht van een apparaat, maar een gebruikelijke manier om het te modelleren gebruikt het aantal transistors dat het apparaat heeft. Overuren, het aantal transistors is toegenomen en daarmee ook de rekenkracht, een trend die vaak de Wet van Moore wordt genoemd. Er kan een parallel worden getrokken met natuurlijke systemen tussen transistors die "aan" en "uit" zijn en een vereenvoudigd model van neuronen:"vuren" en "niet vuren". Zo'n transistortelling geeft een statisch knelpunt voor de rekencapaciteit van computers, het negeren van dynamische aspecten van processorsnelheid, bijvoorbeeld. LaViers merkte op dat een vergelijkbare telling van statische externe configuraties van robots trends in robotcapaciteit zou kunnen onthullen. Bovendien, ze koppelde berekening en mechanisatie in een robot aan interne en externe toestandsveranderingen, respectievelijk, in een natuurlijk organisme. Na het maken van deze vergelijkingen, LaViers kan direct vergelijken hoe expressief robots zijn met natuurlijke organismen, zoals weergegeven in de onderstaande grafiek.
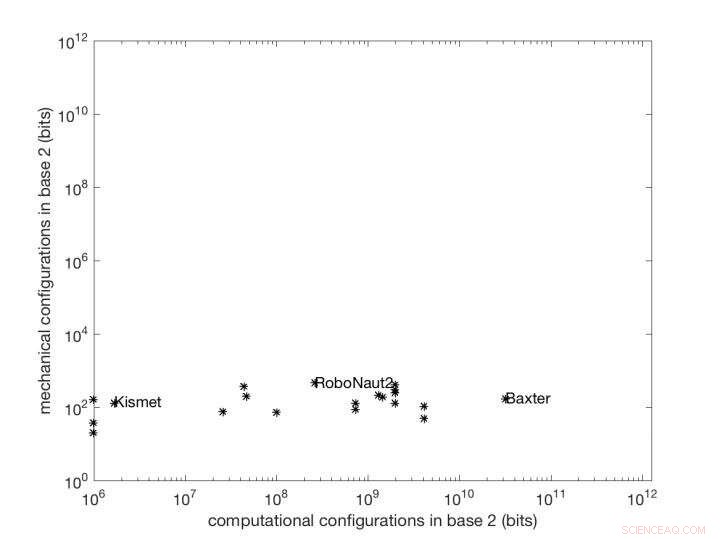
Plot uit het nieuw gepubliceerde werk van LaViers:een vergelijking van de verandering in interne versus externe complexiteit van robots in de afgelopen 15 jaar. Krediet:University of Illinois Robotics, Automatisering en Dans (RAD) Lab
Haar paper richt zich op twee modellen van een microscopische worm (C. Elegans) en verschillende gedeeltelijke organisme-analyses, evenals analyse van een verscheidenheid aan bekende moderne robots. Een grafiek van de bevindingen van LaViers laat zien dat, met behulp van haar methode, de robots presteren meestal tussen de twee modellen van de worm voor hoe expressief ze zijn. Dat is, een geschikt natuurlijk correlaat voor de expressiviteit van bestaande robotsystemen kan deze kleine worm zijn. De vergelijkingen zijn niet perfect, maar ze bieden een vereenvoudiging van een complex probleem om het grotere geheel te begrijpen - hoeveel vooruitgang kan worden geboekt op het gebied van robotica in dynamische situaties.
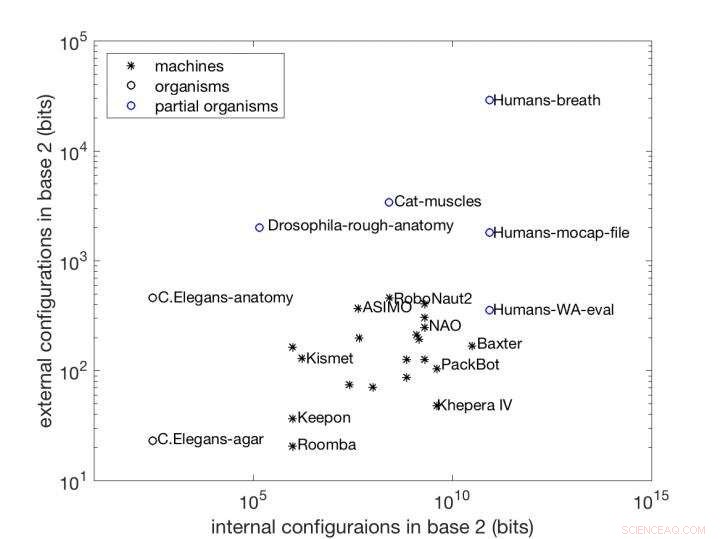
Een vergelijking van dezelfde groep robots met natuurlijke systemen. Zie publicatie voor details. Krediet:University of Illinois Robotics, Automatisering, en Dans (RAD) Lab
Op het gebied van robotica, de voordelen van de natuur worden soms over het hoofd gezien. Het werk van LaViers contextualiseert de vooruitgang die robotici door de jaren heen hebben geboekt. Robots zijn veel geavanceerder geworden, maar als het gaat om echte imitatie van de natuur, is er nog veel te doen. Het grensverleggende aspect van haar huidige werk is dat dit specifieke telmodel nog niet eerder in robotica is gebruikt.
"Waar ik trots op ben met dit artikel, is dat de onthulde trends een beetje schokkend zijn voor mensen - en daarom heeft het lang geduurd voordat het gepubliceerd werd, " Zei LaViers. "De recensenten op deze locatie waren buitengewoon behulpzaam bij het sterker maken van het papier. Uiteindelijk, het werk wijst hopelijk op een manier van denken over kunstmatige versus natuurlijke systemen die ons kan helpen het falen en de robuustheid van machines in dynamische omgevingen te verbeteren. Dat is de richting voor toekomstig werk."
 Onderzoekers produceren slimme stof om zenuwgas te neutraliseren
Onderzoekers produceren slimme stof om zenuwgas te neutraliseren- Onderzoekers ontrafelen meer mysteries van metallische waterstof
- Hebben de warmte en zon invloed op zwembadchloor?
- Polymeer om ammoniakvervuiling op te vangen gerealiseerd
- Studie onthult mogelijk nieuw behandeldoel in de strijd tegen COVID-19
- NASA ontdekt kortstondige tropische depressie 01W
- Satellieten tonen orkaan Katia die naar de kust van Mexico kruipt
- VN-klimaatchef:Kooldioxidebesparingsplannen ingediend voor wereldtop schieten tekort
- Klimaatgerelateerde financiële crises dreigen, maar de oplossing is niet aan de centrale banken
- Australië keurt enorme kolenmijn bij Great Barrier Reef goed
Hoofdlijnen
- Is geluk besmettelijk?
- Onderzoek creëert een manier om varkens te beschermen tegen PRRS tijdens de voortplanting
- Waar bevindt zich DNA in plantencellen?
- Een parasiet volgen die vissen verwoest
- De functie van Peyers-patches
- Verschillende soorten microscopen en hun gebruik
- Kunnen mensen eeuwig leven?
- Hoe verschilt Cytokinese bij planten en dieren?
- Lake Michigan watervogels botulisme sterfgevallen in verband met warm water, algen
- Hoeveel energie hebben we echt nodig?

- Review:Hard-hitting Life is Strange 2 wijkt ver af van origineel

- Startup gebruikt 3D-printen om de productie van metalen onderdelen opnieuw uit te vinden

- Verlenging van de levensduur van goedkope, compact, lichtgewicht batterijen

- Fukushima-hotspots halen de krantenkoppen voor de Olympische Spelen, maar wat is het risico?


 Instructies voor het maken van een JELL-O Cell
Instructies voor het maken van een JELL-O Cell- Belangrijkste delen van een vulkaan
- Kirigami-kunst kan rekbare plasmaschermen mogelijk maken
- De vijftig procent:de economische waarde van onderwijs
- 372, 000 Duitse chauffeurs sluiten zich aan bij juridische stappen tegen Volkswagen
- Waarom is het toevoegen van zout aan water kouder?
- NASA krijgt 's nachts en overdag een blik op een zwakkere brede Irma
- Elektrochemische prestaties van lithium-ioncondensatoren met behulp van voorgelithieerde meerwandige koolstofnanobuizen als anode
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
