Wetenschap
Een wereldwijde bewegingsplanningsaanpak op basis van lokale ervaringen
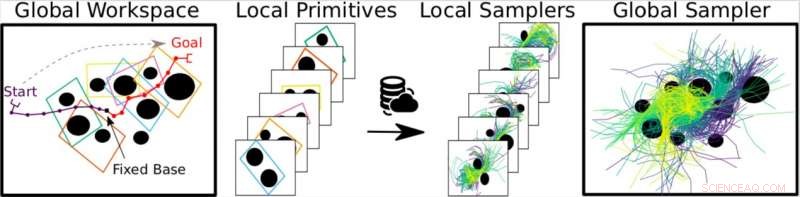
Een illustratie van het voorgestelde raamwerk in een vlakke manipulator. Krediet:Chamzas, Shrivastava en Kavraki.
Terwijl mensen bewegingen natuurlijk en onmiddellijk kunnen uitvoeren, robots hebben geavanceerde strategieën voor bewegingsplanning nodig om door hun omgeving te navigeren. Bewegingsplanning is dus een belangrijk gebied van robotica-onderzoek, gericht op het ontwikkelen van tools en technieken waarmee robots autonoom kunnen opereren in verschillende omgevingen.
Hoewel eerdere studies een verscheidenheid aan bewegingsplanningstechnieken hebben geïntroduceerd, met name op steekproeven gebaseerde algoritmen, de meeste van hen presteren niet optimaal in alle omgevingen. Een belangrijke beperking van veel van deze benaderingen is dat ze de connectiviteit van hoogdimensionale ruimten benaderen met een klein aantal monsters, wat hun prestaties belemmert in scenario's waarin gebieden die nodig zijn voor de connectiviteit van de ruimte een lage kans hebben om bemonsterd te worden. Dit wordt gewoonlijk het 'probleem met smalle doorgangen' genoemd.
Om de beperkingen van bestaande bewegingsplanningsmethoden aan te pakken, onderzoekers van de Rice University, in Texas, hebben een nieuwe aanpak ontwikkeld die de werkruimte ontleedt in lokale primitieven, hun lokale ervaringen memoriseren in de vorm van lokale samplers en deze opslaan in een database. hun methode, geschetst in een paper dat vooraf is gepubliceerd op arXiv, is vooral een proof of concept, omdat het tot nu toe alleen is getest in een nogal vereenvoudigde geometrische setting. Niettemin, het werk van deze onderzoekers heeft het potentieel om een aantal belangrijke uitdagingen op te lossen die zich voordoen bij onderzoek naar bewegingsplanning.
"Onze studie richtte zich uitsluitend op het probleem van geometrische bewegingsplanning, "Constantinos Chamzas, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore . "In een notendop, je hebt een robot en wat obstakels en je wilt een pad vinden om je robot van punt A naar punt B te brengen zonder tegen de obstakels te botsen."
Naast deze algemene mogelijkheden voor bewegingsplanning, in real-life scenario's (bijvoorbeeld tijdens het uitvoeren van huishoudelijke klusjes) moet een robot ook continu herhalende bewegingsplanningsvragen oplossen. De meeste bestaande benaderingen voor bewegingsplanning dwingen robots om real-life taken uit te voeren door nieuwe vragen helemaal opnieuw op te lossen, zelfs als een nieuwe query lijkt op een query die in het verleden met succes is voltooid.

Voorbeeld van een robot die cilinders oppakt uit een boekenkast, dat is een taak met repetitieve bewegingsplanningsquery's. Krediet:Chamzas, Shrivastava en Kavraki.
Onderzoekers proberen daarom nieuwe technieken te ontwikkelen die de oplossingen voor eerdere bewegingsplannen gebruiken om de zoektocht naar een oplossing voor een nieuwe, vergelijkbare vraag over bewegingsplanning te informeren. De aanpak die door Chamzas en zijn collega's is bedacht, bereikt dit door gebruik te maken van eerdere omgevingsgerelateerde kennis die specifiek gericht is op eerder aangetroffen nauwe doorgangen om de bemonsteringsstrategie aan te passen aan het probleem in kwestie.
"Tijdens de training, de voorgestelde methode verdeelt het gegeven probleem in eenvoudigere deelproblemen, elk afzonderlijk oplossen, en slaat deze suboplossingen vervolgens op in een database in de vorm van steekproevenverdelingen, " legde Chamzas uit. "Als zich een nieuw planningsprobleem voordoet, het mondiale probleem wordt weer ontleed in lokale, en onze methode haalt de relevante steekproevenverdelingen op die overeenkomen met de lokale om een globale steekproevenverdeling te creëren die het zoeken veel informatiever begeleidt."
Eigenlijk, de bewegingsplanningsaanpak die door Chamzas en zijn collega's is bedacht, verdeelt een probleem in deelproblemen, traditionele databasemethoden combineren met geïnformeerde steekproeven. Dit onderscheidt het van bestaande benaderingen, die doorgaans een database gebruiken met vooraf berekende oplossingen die tijdens runtime worden gerepareerd of modellen gebruiken die proberen een goede steekproefverdeling voor een bepaalde omgeving af te leiden.
"De twee belangrijkste bijdragen van onze studie zijn dat bepaalde problemen, die voorheen praktisch onmogelijk waren op te lossen met traditionele methoden, kan worden opgelost door te worden ontleed en dat het gebruik van deze combinatie van databases/bemonstering in bepaalde gevallen effectiever is dan andere methoden, ' zei Chamzas.
Tot dusver, de onderzoekers hebben hun methode geëvalueerd in voorlopige tests met eenvoudige geometrische primitieven. De resultaten zijn veelbelovend, omdat hun methode hen in staat stelde om problemen op te lossen die eerdere benaderingen niet of zeer slecht konden oplossen.
In de toekomst, de door Chamzas en zijn collega's voorgestelde aanpak zou kunnen helpen om enkele van de beperkingen van bestaande benaderingen voor bewegingsplanning te overwinnen, waardoor robots eerder verworven kennis kunnen overbrengen naar verschillende omgevingen en zo hun prestaties kunnen verbeteren. De onderzoekers zijn nu van plan om dezelfde aanpak toe te passen in meer gecompliceerde geometrische omgevingen. Ze willen ook manieren onderzoeken waarop hun methode steekproevenverdelingen kan leren, in plaats van ze aan te passen aan oudere oplossingen.
© 2019 Wetenschap X Netwerk
 Onderzoekers ontwikkelen 's werelds eerste aerogels gemaakt van schrootbanden
Onderzoekers ontwikkelen 's werelds eerste aerogels gemaakt van schrootbanden- Zelf-geassembleerd membraan met water-continue transportroutes voor nauwkeurige nanofiltratie
- Antivries om vliegtuigen te verbeteren, ijs en orgaantransplantaties
- Bufferoplossingen voorbereiden
- Een nieuwe vorm van cellulaire logistiek
- Nieuwe stofbronnen van een krimpende Salton Sea hebben negatieve ecologische en gezondheidseffecten
- 2019 op één na warmste jaar ooit
- Wetenschappelijke richtlijnen om chemische ongevallen te voorkomen en te beperken
- Als meer vrouwen beslissingen nemen, het milieu wint
- Informerend beleid voor wereldwijde voedselzekerheid op lange termijn
Hoofdlijnen
- Volledige structuur van mitochondriaal respiratoir supercomplex gedecodeerd
- Roept op tot einde aan Mexico's vangst van bedreigde bruinvis
- Jonge vleermuizen leren vleermuisdialecten van hun nestgenoten
- Hoe huilen werkt
- Kunnen we Neanderthalers terugbrengen?
- Welke vormen over het midden van een cel nabij het einde van Telophase?
- Wilde dieren vormen grote bedreiging voor Outback, klimaatverandering studie vindt
- Deze ringstaartmaki's veroorzaken een stank als ze flirten met potentiële partners
- Japanse wetenschappers kweken medicijnen in kippeneieren
- Een duurzaam antwoord op industriële vervuiling? Dat zijn bananen!

- Facebook kiest Londen voor WhatsApp-betaalbasis

- Robots zullen leraren nooit vervangen, maar kunnen het onderwijs van kinderen een boost geven

- SwarmTouch:een tactiele interactiestrategie voor communicatie tussen mens en zwerm

- 'S Werelds eerste onderzoekstijdschrift voor videogamemuziek en geluid


 Verschil tussen een procent en een percentage punt
Verschil tussen een procent en een percentage punt- Onderzoekers hebben bewezen dat ozon effectief is bij het desinfecteren van coronavirus
- Onderzoek vindt bewijs van 2 miljard jaar vulkanische activiteit op Mars
- Interessante feiten over beekjes en rivieren
- Wetenschappers stellen nano-opsluitingsstrategie voor om sub-nanometerreactoren te vormen
- Sociale media gebruiken om de woede van terreuraanslagen te verzwakken
- Afsterven van koraal voorspeld als mariene hittegolf Hawaii overspoelt
- Explosie in de haven van Tianjin versterkte atmosferische stikstofdepositie boven de Bohai-zee
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
