Wetenschap
Hoe je je robot traint (om je avondeten te geven)

Onderzoekers van de Universiteit van Washington hebben een robotsysteem ontwikkeld dat mensen kan voeden die iemand nodig hebben om te eten. Hier, een vrijwilliger laat zien hoe het systeem werkt. Credit:Eric Johnson/Universiteit van Washington
Ongeveer 1 miljoen volwassenen in de Verenigde Staten hebben iemand nodig die hen helpt eten, volgens censusgegevens uit 2010. Het is een tijdrovende en vaak lastige taak, een grotendeels gedaan uit noodzaak in plaats van keuze.
Onderzoekers van de Universiteit van Washington werken aan een robotsysteem dat het gemakkelijker kan maken. Na het identificeren van verschillende voedingsmiddelen op een bord, de robot kan een strategie bedenken hoe hij een vork moet gebruiken om de gewenste hap op te pakken en in de mond van een persoon te brengen.
Het team publiceerde zijn resultaten in een reeks papers:One werd onlangs gepubliceerd in IEEE Robotica en automatiseringsbrieven , terwijl de andere op 13 maart zal worden gepresenteerd op de ACM/IEEE International Conference on Human-Robot Interaction in Zuid-Korea.
"Afhankelijk zijn van een verzorger om elke dag elke hap te voeden, neemt iemands gevoel van onafhankelijkheid weg, " zei de corresponderende auteur Siddhartha Srinivasa, de Boeing bijzonder hoogleraar aan de Paul G. Allen School of Computer Science &Engineering van de UW. "Ons doel met dit project is om mensen een beetje meer controle over hun leven te geven."
Het idee was om een autonoom voersysteem te ontwikkelen dat aan de rolstoelen van mensen zou worden bevestigd en mensen zou voeden wat ze maar wilden eten.
"Toen we aan het project begonnen, realiseerden we ons:er zijn zoveel manieren waarop mensen een stuk voedsel kunnen eten, afhankelijk van de grootte, vorm of consistentie. Hoe beginnen we?" zei co-auteur Tapomayukh Bhattacharjee, een postdoctoraal onderzoeksmedewerker in de Allen School. "Dus hebben we een experiment opgezet om te zien hoe mensen gewone voedingsmiddelen zoals druiven en wortels eten."
De onderzoekers schikten borden met ongeveer een dozijn verschillende soorten voedsel, variërend in consistentie van harde wortelen tot zachte bananen. De borden bevatten ook voedsel zoals tomaten en druiven, die een harde huid en een zachte binnenkant hebben. Daarna gaf het team vrijwilligers een vork en vroeg hen om verschillende stukken voedsel op te pakken en aan een mannequin te voeren. In de vork zat een sensor om te meten hoeveel kracht mensen gebruikten bij het oppakken van voedsel.
De vrijwilligers gebruikten verschillende strategieën om voedsel met verschillende consistenties op te pikken. Bijvoorbeeld, mensen prikten zachte voorwerpen zoals bananen schuin om te voorkomen dat ze van de vork glijden. Voor artikelen zoals wortelen en druiven, de vrijwilligers hadden de neiging om wiebelende bewegingen te gebruiken om de kracht te vergroten en elke beet te speer.
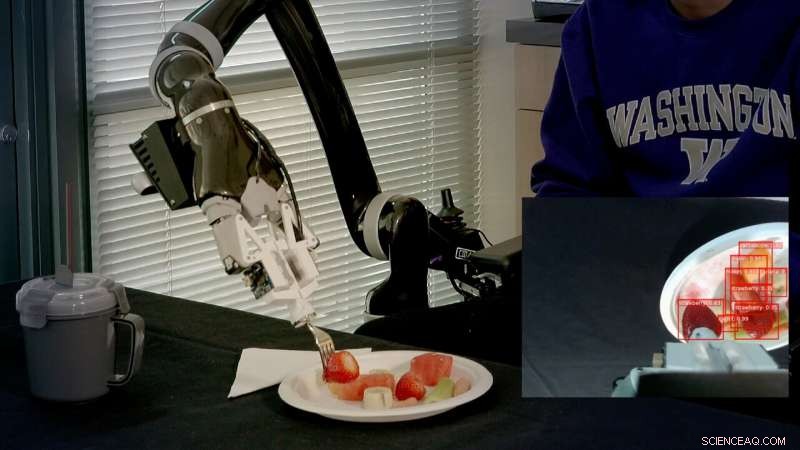
Het objectdetectie-algoritme, genaamd RetinaNet, scant de plaat, identificeert de soorten voedsel erop en plaatst een kader rond elk item. Credit:Eric Johnson/Universiteit van Washington
"Mensen leken verschillende strategieën te gebruiken, niet alleen op basis van de grootte en vorm van het voedsel, maar ook op hoe hard of zacht het is. Maar moeten we dat echt doen?" zei Bhattacharjee. "We besloten een experiment te doen met de robot waarbij we hem voedsel lieten spiesen totdat de vork een bepaalde diepte binnenin had bereikt, ongeacht het soort voedsel."
De robot gebruikte dezelfde kracht-en-spiesstrategie om te proberen alle stukjes voedsel op te rapen, ongeacht hun consistentie. Het was in staat om hard voedsel op te pikken, maar het worstelde met zacht voedsel en die met een harde huid en zachte binnenkant. Dus robots, zoals mensen, moeten aanpassen hoeveel kracht en hoek ze gebruiken om verschillende soorten voedsel op te pakken.
Het team merkte ook op dat de handelingen van het oppakken van een stuk voedsel en het aan iemand geven niet onafhankelijk van elkaar zijn. Vrijwilligers oriënteerden vaak een stuk voedsel specifiek op de vork zodat het gemakkelijk kon worden gegeten.
"Je kunt een wortelstok oppakken door hem in het midden van de stok te prikken, maar het zal moeilijk zijn voor een persoon om te eten, " zei Bhattacharjee. "Aan de andere kant, als je het aan een van de uiteinden oppakt en dan de wortel naar iemands mond kantelt, het is makkelijker om een hap te nemen."
Om een spies- en voerstrategie te ontwerpen die verandert op basis van het voedselproduct, de onderzoekers combineerden twee verschillende algoritmen. Eerst gebruikten ze een objectdetectie-algoritme genaamd RetinaNet, die de plaat scant, identificeert de soorten voedsel erop en plaatst een kader rond elk item.
Toen ontwikkelden ze SPNet, een algoritme dat het soort voedsel in een bepaald kader onderzoekt en de robot vertelt hoe het voedsel het beste kan worden opgepakt. Bijvoorbeeld, SPNet vertelt de robot om een aardbei of een plakje banaan in het midden te prikken, en speer wortelen aan een van de twee uiteinden.
Het team liet de robot stukjes voedsel oprapen en deze aan vrijwilligers voeren met behulp van SPNet of een meer uniforme strategie:een benadering die het midden van elk voedselproduct doorstak, ongeacht wat het was. De verschillende strategieën van SPNet presteerden beter of deden hetzelfde als de uniforme aanpak voor al het voedsel.
"Veel technische uitdagingen zijn niet kieskeurig over hun oplossingen, maar dit onderzoek is zeer nauw verbonden met mensen, Srinivasa zei. "Als we geen rekening houden met hoe gemakkelijk het is voor een persoon om een hap te nemen, dan kunnen mensen ons systeem misschien niet gebruiken. Er is een universum van soorten voedsel daarbuiten, dus onze grootste uitdaging is om strategieën te ontwikkelen die ze allemaal aankunnen."
Het team werkt momenteel samen met het Taskar Center for Accessible Technology om feedback te krijgen van zorgverleners en patiënten in assistentiewoningen over hoe het systeem kan worden verbeterd om aan de behoeften van mensen te voldoen.
"Uiteindelijk is ons doel dat onze robot mensen helpt om alleen te lunchen of te dineren, " Zei Srinivasa. "Maar het punt is niet om zorgverleners te vervangen:we willen ze empoweren. Met een robot om te helpen, de verzorger kan het bord opzetten, en dan iets anders doen terwijl de persoon eet."
 Nieuw membraanwaterbehandelingssysteem om giftig afval en afvalverwerkingskosten met meer dan 90 procent te verminderen
Nieuw membraanwaterbehandelingssysteem om giftig afval en afvalverwerkingskosten met meer dan 90 procent te verminderen- Hoe molpercentage te berekenen
- Onderzoekers verkrijgen een belangrijke chemische verbinding
- Valentie van elektronen in het periodiek systeem
- Zelfherstellende elastomeren van vloeibaar metaal
Hoofdlijnen
- Waar komt collageen vandaan?
- 6 soorten vrij beweegbare gewrichten
- Hoe beïnvloedt het hebben van twee van elk soort chromosoom de genen die een persoon heeft?
- Welke soorten organische moleculen vormen een celmembraan?
- Onvolledige dominantie: definitie, uitleg en voorbeeld
- Haaien evolueerden vliegtuigachtige attributen om in habitats te passen
- High School Biology Experiment Ideas
- Ingenieurs hacken celbiologie om 3D-vormen te maken van levend weefsel
- Burgerwetenschap kan trends in de vlinderpopulatie voorspellen
- Norman, wanneer kunstmatige intelligentie psychologisch wordt

- Bij Big Blue, Amerika's eerste zwarte software-engineer baande een pad maar betaalde een hoge prijs

- VAE-luchtvaartmaatschappijen hervatten beperkte passagiersvluchten

- Spotify zegt dat isolatie de interesse in chille muziek vergroot

- Meer riem bij VW om elektrische nieuwe start te financieren


 Mensen koloniseerden tijdens het Pleistoceen verschillende omgevingen in Zuidoost-Azië en Oceanië
Mensen koloniseerden tijdens het Pleistoceen verschillende omgevingen in Zuidoost-Azië en Oceanië- GPS-coördinaten converteren naar voeten
- Gevangen water, kooldioxide uit auto-uitlaatgassen kan helpen bij het verbouwen van voedsel
- Consumenten komen in aanraking met nanodeeltjes
- Voor het eerst snelle gasvlammen ontdekt in witte dwerg
- Aanpassingen van dieren in het tropische regenwoud
- Nieuwe elektronische koeltechnologie om miniaturisatie van kwantumcomputers mogelijk te maken
- Wat gebeurt er met de aardkorst na een aardbeving?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
