Wetenschap
Nieuwe hydraulische actuator maakt robots sterker

Deze afbeelding toont een zevenassige hydraulische robotarm die betonplaten breekt, elk 30 mm dik. Dit is een prototype ter vergelijking met een vierpotige robot die ook in dit project wordt ontwikkeld door Waseda University, Meiji-universiteit, en anderen, geproduceerd op ongeveer dezelfde grootte. Het bestaat uit zeven van de nieuwe hydraulische motoren. Krediet:Suzumori-laboratorium
Onderzoekers van het Tokyo Institute of Technology (Tokyo Tech) hebben een hydraulische actuator ontwikkeld waarmee robuuste robots kunnen werken in rampgebieden en andere ruwe omgevingen. De Tokyo Tech Venture H-MUSCLE Corporation werd opgericht om toepassingen voor de actuator na te streven, en verzending van productmonsters begint in februari 2019.
De meeste robots van vandaag worden aangedreven door elektromotoren, maar hydraulische aandrijvingen, met hun hoge output en slagvastheid, zou zeer geschikt zijn voor robots die in ruwe omgevingen werken. Echter, typische hydraulische aandrijvingen zijn ontwikkeld voor industriële machines, zoals schoppen, en zijn te groot en te zwaar om in robots te worden gebruikt; evenmin kunnen ze een soepele beweging of krachtcontrole bieden.
Tokyo Tech School of Engineering professor Koichi Suzumori en collega's ontwikkelden een hydraulische actuator om deze problemen op te lossen. De actuator biedt een sterk verhoogd vermogen en schokbestendigheid in vergelijking met conventionele elektromotoren. Het geeft ook een kleiner formaat, hogere output (kracht-massaverhouding), en soepelere bediening in vergelijking met conventionele hydraulische aandrijvingen. Het verstrekken van een hoog vermogen, duurzaamheid, en uitstekende controle, de actuator stelt robots in staat om in de zwaarste omgevingen te werken en zwaar werk uit te voeren met een zachte aanraking.
Deze hydraulische actuator is het resultaat van de Tough Robotics Challenge, georganiseerd door het Impulsing Paradigm Change through Disruptive Technologies Program (ImPACT) van het Cabinet Office van Japan. Tokio Tech; JPN Co., Ltd.; Bridgestone Corporation; en KYB Corporation; samen met andere universiteiten en ondernemingen die zich bezighouden met hydraulische apparatuur, hebben sinds 2014 deelgenomen aan de ontwikkeling van de hydraulische actuator voor robuuste robots. Om de acceptatie van de technologie te bevorderen, H-MUSCLE zal monsters van zijn hydraulische cilinders en hydraulische motoren naar binnenlandse fabrikanten verzenden, zijn assortiment actuatoren uitbreiden voor toekomstige verkoop, en verken verdere toepassingen.
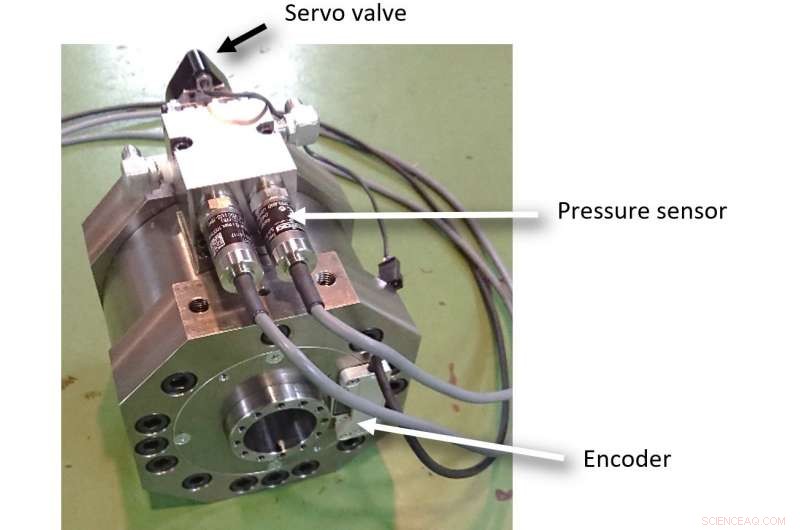
Een kleine, lichtgewicht, soepel lopende motor. Krediet:Suzumori-laboratorium
Achtergrond
De Impact Tough Robotics Challenge (2014-2018, Programmamanager:Satoshi Tadokoro, Professor, Tohoku University) heeft onderzoek gedaan met als doel robots te maken voor zware operaties, zelfs in extreme rampgebieden. Als onderdeel van dit project, hydraulische actuatoren specifiek voor robots en hun robottoepassing werd als onderzoeksthema ingesteld. Koichi Suzumori (robotica, actuator engineering) bij Tokyo Tech was de leider van de groep met deelnemers Tokyo Tech; Okayama-universiteit; Ritsumeikan-universiteit, JPN Co., Ltd.; Bridgestone Corporation; en KYB Corporation. Met de medewerking van vele andere ondernemingen met zeer gespecialiseerde technologieën, ze zijn erin geslaagd een actuator voor hydraulische robots te ontwikkelen die klein is, lichtgewicht, hoge output, en soepel glijdend, iets dat niet beschikbaar is in bestaande producten.
verdiensten van kleine, lichtgewicht, soepel glijdende aandrijvingen
De nieuwe hydraulische actuator biedt de volgende voordelen ten opzichte van bestaande hydraulische actuators.
- Kleine maat. Japanese Industrial Standards (JIS) specificeert alleen cilinders met een binnendiameter van 35 mm of groter. Echter, robots hebben kleinere cilinders nodig. H-MUSCLE heeft in samenwerking met JPN Co. cilinders ontwikkeld met een binnendiameter van 20 tot 30 mm, Ltd.
- Hoge kracht-massaverhouding. "Kracht" is de gegenereerde axiale kracht, en "massa" is het gewicht van de cilinder zelf. Robots hebben een hogere kracht-massaverhouding nodig dan algemene stationaire industriële machines. Hoewel het cijfer slechts van een representatieve steekproef is, H-MUSCLE-cilinders kunnen een overweldigend hogere waarde produceren. Dit werd mogelijk gemaakt door (1) een aandrijfdruk van 35 MPa, (2) titanium- en magnesiumlegeringen, en (3) inventief ontwerp.
- Soepel glijden. Deze cilinder werkt op een opmerkelijk lagere druk dan die van normale JIS-cilinders. Conventionele hydraulische cilinders en motoren hebben stijve afdichtingen tussen de zuiger en de cilinder om de vloeistof af te dichten, en de grote wrijving hiervan verhinderde soepele bewegingen en controle van kracht. Met wrijvingsarme afdichtingen en inventief ontwerp, dit onderzoek realiseerde lage wrijving, ongeveer een tiende van de conventionele producten. Dit lost de moeilijkheid op in nauwkeurige beweging en krachtcontrole die wordt aangetroffen bij conventionele hydraulische robots.
ImPACT heeft verschillende robuuste robotprototypes gebouwd om mogelijke toepassingen voor de hydraulische actuator te testen.
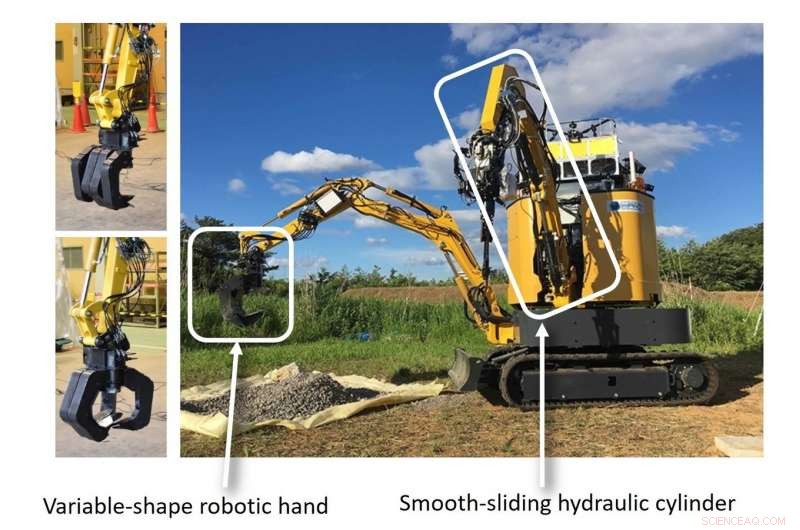
Een door Komatsu ontwikkelde bouwrobot, Universiteit van Osaka, en anderen. De kleinste van de twee armen wordt aangedreven door soepel glijdende cilinders die in dit programma zijn ontwikkeld, bijdragen aan zijn vermogen om fijne manipulaties uit te voeren. Het uiteinde van de andere arm is voorzien van een hydraulische hand met behulp van de nieuwe hydraulische actuator. Met vier vingers, het kan indien nodig in de schopmodus of in de handmodus worden gebruikt. In de handmodus, het kan voorwerpen van verschillende vormen grijpen en de kracht van de greep beheersen. Krediet:Komatsu, Universiteit van Osaka, Tokyo Institute of Technology
 Reis om mysteries van de Stille Oceaan te ontdekken
Reis om mysteries van de Stille Oceaan te ontdekken- Verwoest Venetië zet zich schrap voor derde grote overstroming
- Australië ligt op schema om klimaatdoelen ruimschoots te missen
- Koppeling Zuidelijke Oceaan en Antarctica tijdens een vroegere kas
- Een deel van de Stille Oceaan warmt niet op zoals verwacht, kopen waarom?
Hoofdlijnen
- Wat is het Human Epigenome Project?
- Een buitengewoon grotdier gevonden in Oost-Turkmenistan
- Soorten redeneren in geometrie
- Moeite met onthouden? Vertel je vrienden om een wandeling te maken
- Net als mensen, honden bleken onrustig te slapen na negatieve ervaringen
- Wat zijn de voordelen van biodiversiteit?
- Nieuw voorspellingsmodel voor kantelpunten biedt inzicht in afnemende bijenvolken
- Stelten vliegen honderden kilometers om eieren te leggen die meer dan 50% van hun lichaamsgewicht uitmaken
- Grootste genetische studie van muggen onthult verspreiding van resistentie tegen insecticiden in Afrika
- Ontwikkeling van kankercellen volgen met drinkbare elektronische sensoren
- Compacte en flexibele supercondensator ontwikkeld met behulp van een eenvoudige spuitcoatingmethode

- Emoji worden inclusiever, maar niet per se representatiever

- Gigantische luchthaven van Peking opent op vooravond van 70ste verjaardag van China

- Zou Super Mario Bros. beter zijn als je als jezelf kon spelen? We zullen, niet precies

 Cool Science Experiments met eieren
Cool Science Experiments met eieren - Amazon wil Alexa-assistent een groter deel van het leven van gebruikers maken
- Hoe de afstand tussen breedtegraden te berekenen
- Hawaii landbestuur verleent vergunning om verdeeldheid zaaiende telescoop te bouwen
- Biologisch afbreekbaar plastic wordt binnenkort verboden in Australië - dat is een grote overwinning voor het milieu
- Tonnen leven diep in het aardoppervlak gevonden
- Nieuwe studie ontkracht de theorie van oorlogszuchtige zakelijke concurrentie op financiële markten
- Een droogte-index voor verdampingstekorten om de gevolgen van droogte voor ecosystemen te detecteren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
