Wetenschap
Een op ToM gebaseerd schattingsalgoritme voor menselijke intenties voor gerobotiseerde magazijnen
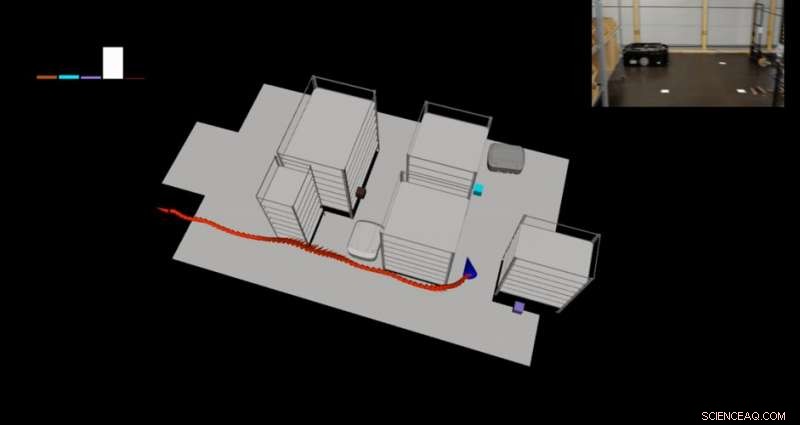
Het traject van de menselijke arbeider in het magazijn testgebied. De locatiegegevens worden geleverd door het lokalisatie-algoritme van Hololens. Rechtsboven is de first person view van de arbeider te zien. Linksboven staan de kansen dat de werknemer naar een specifiek doel gaat. Krediet:Petkovic et al.
De snelle groei van logistieke bedrijven heeft geleid tot een behoefte aan meer geëvolueerde en efficiënte magazijnsystemen. Vooruitgang in robotica kan helpen om aan deze behoeften te voldoen door taken te automatiseren die momenteel door mensen worden uitgevoerd, de workflow aanzienlijk versnellen.
Om veilig en efficiënt te kunnen werken, echter, robotmagazijnmedewerkers moeten de bedoelingen van hun menselijke operators kunnen herkennen. Onderzoekers van de Universiteit van Zagreb en het Karlsruhe Institute of Technology hebben onlangs een algoritme ontwikkeld voor het schatten van menselijke intenties op basis van theory of mind (ToM) principes. ToM is het menselijk vermogen om intentie te herkennen, overtuigingen, verlangens, emoties, en mentale toestanden bij andere mensen.
"Ons onderzoek is ontstaan uit het EU Horizon 2020-project SafeLog, die tot doel heeft een veilige toegang voor mensen tot volledig geautomatiseerde magazijnen mogelijk te maken, waar mobiele robots rekken ronddragen, zonder de hele vloot van robots stil te leggen, "David Puljiz, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Dit wordt gedaan door het gebruik van een speciaal ontworpen veiligheidsvest en een AR-apparaat om de werknemer te begeleiden en te helpen door deze omgeving te navigeren."
Om de veiligheid te vergroten, het door de onderzoekers bedachte magazijnbeveiligingssysteem plant het pad van een robot zo dat het niet botst met dat van menselijke arbeiders. Om het te laten werken, het moet weten waar de menselijke operator naartoe gaat, vooral als hij niet op weg is naar een vooraf afgesproken locatie.
Puljiz en zijn collega's observeerden de beweging van individuele menselijke werknemers in magazijnomgevingen en valideerden ze met betrekking tot hun doellocaties, met behulp van een benadering die gegeneraliseerde Voronoi-diagramgebaseerde planning wordt genoemd. Deze waarnemingen werden vervolgens ingevoerd in een verborgen Markov-model, die de intenties van een werknemer online kan inschatten terwijl hij door veranderende omgevingen navigeert.
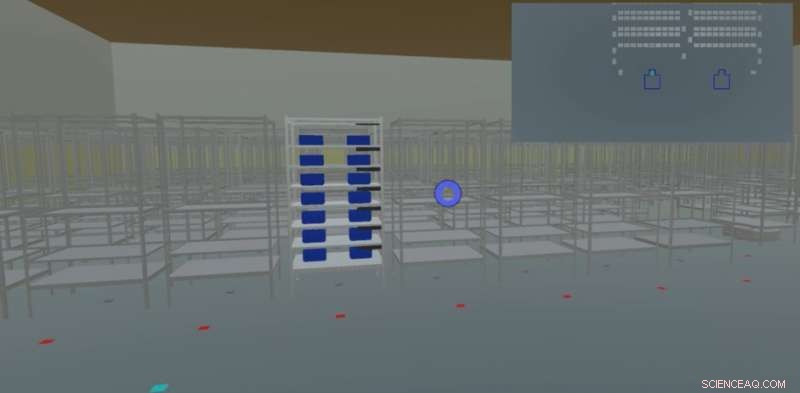
De first-person view in de VR-omgeving, gebruikt om het algoritme te testen in grootschalige scenario's. Linksboven is het gebied rondom de arbeider in vogelvlucht te zien inclusief de mobiele robots. Krediet:Puljiz et al.
"Het voorgestelde op ToM gebaseerde schattingsalgoritme voor menselijke intenties voor flexibele gerobotiseerde magazijnen is gebaseerd op verborgen bewegingsvalidatie van Markov-modellen, "Tomislav Petkovi, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "We observeren de beweging van de werknemer en valideren deze met betrekking tot de doellocaties met behulp van gegeneraliseerde Voronoi-diagramgebaseerde padplanning. Deze waarnemingen worden vervolgens verwerkt door het verborgen Markov-modelraamwerk, die de intenties van werknemers online schat en in staat is om te gaan met veranderende omgevingen. Het LAMOR-lab van de Universiteit van Zagreb heeft de backend van het algoritme ontwikkeld:bewegingsvalidatie en doelschatting."
Om de effectiviteit van het model te evalueren, IPR Lab aan het Karlsruhe Institute of Technology voerde experimenten uit voor het schatten van intenties in een kleine testomgeving in magazijnen, met Microsoft Hololens AR-brillen. De onderzoekers voerden verdere evaluaties uit in grootschalige virtuele magazijnen, met behulp van VR-technologie. Ze ontdekten dat hun raamwerk de intenties van magazijnmedewerkers effectief kon inschatten, met opmerkelijke precisie.
"Ik denk dat het meest betekenisvolle aspect van ons onderzoek is dat AR-apparaten voor meer dan alleen entertainment of marketing kunnen worden gebruikt en zelfs nuttig kunnen zijn in industriële omgevingen, " zei Puljiz. "Het onderzoeksveld is vrij nieuw en er zijn veel mogelijkheden op dit gebied."
In de toekomst, het door Puljiz en zijn collega's ontwikkelde realtime algoritme voor het schatten van menselijke intenties zou de veiligheid en efficiëntie van op magazijnen gebaseerde robotsystemen kunnen verhogen. Bijvoorbeeld, het zou kunnen helpen bij de ontwikkeling van meer responsieve robots die de bedoelingen van menselijke operators om hen heen kunnen inschatten, hun routes dienovereenkomstig aanpassen en plannen.
"Bij toekomstige werkzaamheden we zouden het algoritme kunnen uitbreiden naar 3D-ruimten en de blikrichting in 3D kunnen volgen om te bepalen, bijvoorbeeld, als de werknemer van plan is het verkeerde object te kiezen of als hij zich zorgen maakt over een naderende robot, " zei Puljiz. "Er zijn genoeg andere mogelijkheden, inclusief hand-tracking integraties."
© 2018 Wetenschap X Netwerk

Hoofdlijnen
- Evolutie in je achtertuin - koolmezen passen hun snavel misschien aan aan vogelvoeders
- Wat gebeurt er tijdens de G1-fase?
- Bestaat er zoiets als een werkelijk onzelfzuchtige daad?
- Welke conclusies kunnen worden getrokken uit de overeenkomsten van de genetische code tussen levende organismen?
Als je door het park loopt en een straathond door het gras ziet rennen, is het niet zo moeilijk om delen van het erfgoed te identificer
- Hoe het brein van Albert Einstein werkte
- Bacteriën als pacemaker voor de darm
- Door klimaat beïnvloede veranderingen in bloei, vruchtvorming heeft ook invloed op de vogelstand, activiteiten
- Profase: wat gebeurt er in dit stadium van mitose en meiose?
- Onderzoek naar klimaatverandering van de achteruitgang van de jongen van lederschildpadden levert geen antwoorden op






 Onderzoekers gebruiken nanotechnologie om nieuwe behandeling voor endometriose te ontwikkelen
Onderzoekers gebruiken nanotechnologie om nieuwe behandeling voor endometriose te ontwikkelen- Vijf jaar durende studie onthult hoeveel koolstof de ecologische hulpbronnen van China vastleggen
- Studie:Zwart ondernemerschap in de Verenigde Staten
- Wat was de Middeleeuwse warme periode?
- Hoe maak je een model van het pompende menselijke hart
- Onderzoekers ontdekken universele wet voor lichtabsorptie in 2D-halfgeleiders
- Vitale economische gegevens zijn waarschijnlijk verloren gegaan tijdens de sluiting - dit is waarom het belangrijk is voor alle Amerikanen
- Ongekende 3D-beelden van levende cellen plus details van moleculen erin
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
