Wetenschap
EuMoBot:euglenoïde beweging nabootsen in een zachte robot
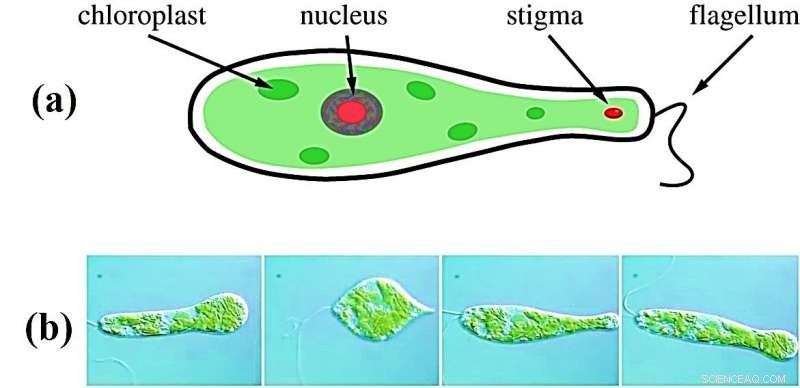
a) Schematische illustratie van een euglenoïde organisme met verschillende cellulaire organismen, waaronder een flagellum. Afbeelding aangepast van:IEE Robot. Autom. Lett., doi:10.1109/LRA.2017.2726113, b) Opeenvolging van beelden van de beweging van Eutreptiella spirogyra tijdens euglenoïde beweging. Afbeeldingen gereproduceerd met toestemming van, Richard E. Triemer, het Euglenoide-project. Krediet:RSIF, doi:10.1098/rsif.2018.0301
Zwemmen is een vorm van voortbeweging die door veel organismen wordt gebruikt op een breed scala van schalen in de natuur. Micro-organismen met een kleine massa die dominantie van viskeuze krachten in het medium tegenkomen, hebben een vormverandering nodig die niet met de tijd verandert om een fluïdische voortstuwing te bereiken die is afgestemd op de hydrodynamica. Om deze uitdaging te overwinnen, eencellige flagellaten van de Euglena-familie ontwikkelden een karakteristieke beweging die bekend staat als 'euglenoïde beweging' waarbij het lichaam aanzienlijk van vorm verandert, waardoor het organisme door viskeuze vloeistoffen en kleine ruimtes kan navigeren. Dit vermogen om de lichaamsvorm te veranderen en door krappe ruimtes en rommelige omgevingen te bewegen, is vooral aantrekkelijk in technische biomimetische robots. Voorbeelden van toepassingen van miniatuurrobots zijn beweging door biologische vloeistoffen tijdens medische procedures in vivo en navigeren door puin in externe omgevingen tijdens zoek- en reddingsoperaties van overlevenden.
Geïnspireerd door euglenoïden, Krishna Manaswi Digumarti en medewerkers van de afdeling Engineering and Mathematics presenteerden het ontwerp en de ontwikkeling van EuMoBot, een multi-gesegmenteerde zachte robot. De biomimetische robot kan grote lichaamsvervormingen repliceren voor voortbeweging. In de studie, de wetenschappers ontwierpen twee robots van verschillende groottes om met een constant intern volume te werken. Het technische protocol maakte gebruik van de hyperelasticiteit van met vloeistof gevulde elastomere kamers om de beweging van euglenoïden te repliceren. Van de twee, de kleinere robot bewoog zich met een snelheid van 1/5 lichaamslengte per cyclus, terwijl de grotere robot met een snelheid van 1/10 lichaamslengte per cyclus bewoog. De studie toonde aan hoe zachte biomimetische robots kunnen worden gebruikt om van vorm te veranderen en biologische beweging te repliceren, terwijl het fungeert als een hulpmiddel om biomimetische robots te bestuderen.
De wetenschappers presenteerden ook een kwantitatieve methode op basis van elliptische Fourier-descriptoren om de vorm van de robot te karakteriseren en te vergelijken met zijn biologische euglenoïde tegenhanger. De resultaten toonden 85 procent gelijkenis in vorm, wat aangeeft dat de technische techniek van toepassing was om miniatuurrobots te ontwikkelen. De methode stelde de wetenschappers in staat om de evolutie van vorm in niet-lineaire, dynamische zachte robots die geen specifieke vorm hadden om door te worden gemodelleerd. De resultaten van het onderzoek zijn nu gepubliceerd in de Tijdschrift van de Royal Society Interface .
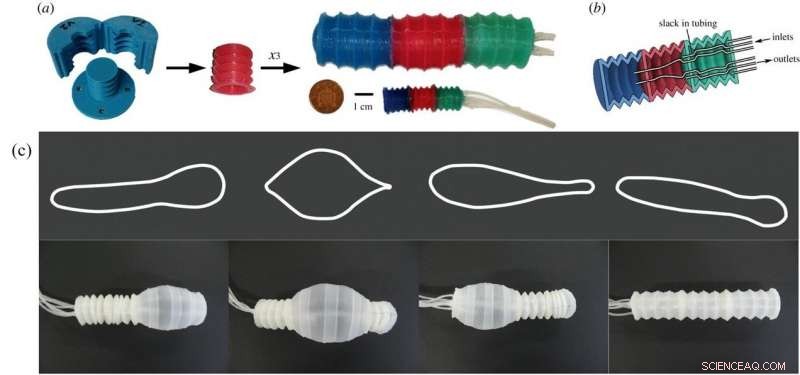
Fabricage van de zachte robot met meerdere segmenten door drie HEB-actuators aan elkaar te hechten. a) Driedimensionale bedrukte mal met twee helften en een kern die wordt gebruikt om het siliconenelastomeer te gieten. Midden:een enkele actuatorkamer. Rechts:een robot met drie segmenten gefabriceerd op twee verschillende schalen. Een Engelse cent getoond voor schaal. b) Dwarsdoorsnede van de robot met verschillende kamers. Elke kamer was voorzien van een inlaat- en uitlaatbuis. Voldoende speling voorzien om vrije uitzetting van de kamers mogelijk te maken. c) Boven:omtrek van celvormen tijdens euglenoïde beweging. Onderkant:de gefabriceerde zachte robot die de bio-geïnspireerde euglenoïde vorm repliceert. Krediet:RSIF, doi:10.1098/rsif.2018.0301.
Biomimetische engineeringstrategieën hebben onderzoekers geïnspireerd om ontwerpen uit het dierenrijk te zoeken en biologisch geïnspireerde robots te maken. Euglenoïden zijn eencellige flagellaten, vanwege hun plantaardig en dierlijk karakter uitgebreid bestudeerd in het lab als model. De organismen gebruiken unieke strategieën om bij lage Reynoldsgetallen te zwemmen en studies over hun voortbeweging zijn relatief recent. De cellen van het organisme zijn meestal uitgerust met een of meer flagellen om te zwemmen, terwijl het ook een tweede type langzamere beweging vertoont, de euglenoïde beweging, waarin de cel een dramatische vormverandering ondergaat. In de huidige studie, Digumarti et al. gebruikte de tweede vorm van beweging om een zachte, functionele robot gebaseerd op het gedrag van het micro-organisme.
De evolutionaire reden voor de waargenomen vormverandering tijdens euglenoïde beweging is onbekend, hoewel wordt aangenomen dat vervorming in celgrootte is ontstaan als reactie op sterke stimuli zoals licht, warmte, chemische schok of contact. Toen de micro-organismen in een met vloeistof gevuld microscopisch doolhof werden geplaatst dat leek op hun natuurlijke omgeving, velen vertoonden euglenoïde beweging, wat suggereert dat de beweging zeer geschikt was voor beperkte omgevingen. Beweging van deze aard kan nuttig zijn voor een bio-geïnspireerde robot op het gebied van zachte robotica om door rommelige omgevingen te reizen met behulp van grote lichaamsvervormingen.
In de studie, de auteurs presenteerden het ontwerp, bedieningsprincipe en fabricagemethode om EuMoBot te engineeren, een zachte robot die euglenoïde beweging demonstreert. De voortbeweging door een vloeistof werd gekwantificeerd ten opzichte van de beweging van het natuurlijke micro-organisme. Omdat de onderliggende mechanismen van vormverandering eerder in detail werden bestudeerd, Digumarti et al. gericht op de macroscopische vorm van de euglenoïde in robotvorm zonder veranderingen op microscopisch niveau te repliceren. Om zachte fluïdische actuatoren te genereren, de onderzoekers ontwierpen een nieuw balgachtig apparaat genaamd de 'hyper-elastische balg' (HEB) -actuator, zoals eerder beschreven door dezelfde onderzoeksgroep.

a) De naleving van de robot aantonen terwijl deze uitzet tussen stijve schroeven. b) Opeenvolging van afbeeldingen aan het begin en einde van één bewegingscyclus op een vlakke tafel. c) Robot die in een pijp klimt met een gang van het inch-wormtype. Krediet:RSIF, doi:10.1098/rsif.2018.0301.
De ingenieurs vormden de vorm van de actuator met behulp van een 3D-geprinte mal. Ze fabriceerden twee robots van verschillende grootte. Ze wierpen drie actuatorkamers, gevolgd door elastomeer gemengd met pigmenten die in de mal zijn geïnjecteerd om 's nachts uit te harden en een doorschijnend wit omhulsel te vormen. De bio-geïnspireerde zachte robot bevatte een opblaas- / leegloopkamer om de euglenoïde vorm te repliceren en gelijkenis in beweging te bereiken.
Om de voortbeweging van de gemanipuleerde robots te testen, de onderzoekers plaatsten ze in een tank gevuld met een oplossing van methylcellulose in water. De robots in elk experiment hadden een constant binnenvolume, en hun inwendige vloeistof verplaatste zich van de ene kamer naar de andere, het reproduceren van de beweging van een expansiegolfkarakteristiek voor euglenoïden. Beide robots toonden het vermogen om te zwemmen door de vorm van hun lichaam te veranderen. Het verschil in snelheid hing af van het vloeistofvolume dat door de kamers van de zachte robot werd gepompt. De wetenschappers observeerden de hydrodynamische gelijkenis tussen de zachte robot en het micro-organisme ten opzichte van de Reynold-getallen bij beide maten. De zachte robot was niet alleen beperkt tot het werken in een vloeibare omgeving als zijn biologische tegenhanger, met capaciteit voor multimodale beweging op een vlakke tafel en het beklimmen van een pijp met een niet-constant bedieningsvolume.
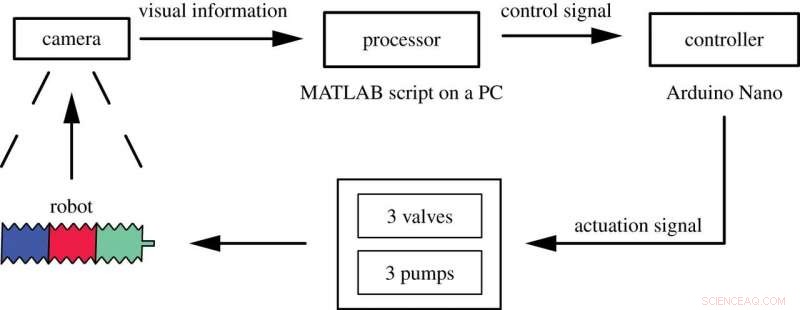
Schematische weergave van de besturingsarchitectuur van de zachte robot. Een camera wordt gebruikt om de huidige staat van de robot te bepalen. Een MATLAB-script verwerkt die informatie om de huidige staat van de robot te bepalen, die uitzetting en samentrekking van elke kamer omvat. Vervolgens gaat het door de juiste stuursignalen naar een Arduino, die de werking van pompen en kleppen regelt om de vloeistofstroom in de robot te sturen. Krediet:RSIF, doi:10.1098/rsif.2018.0301.
De robot maakt gebruik van een op feedback gebaseerde benadering voor autonome besturing, het wegnemen van de noodzaak om de dynamiek van de pomp en de vloeistofstroom in de robot te modelleren. Een machinevisie-schatting van de kamergrootte via een camera en MATLAB-script leverde feedback op. Het systeem gebruikte de uitzetting en samentrekking van elke kamer om de vloeistofstroom in de robot te regelen. Sensoren in de robot maakten directe metingen van de vloeistofdruk mogelijk.
Vormschatting van de robot werd bereikt met wiskundige descriptoren die waren geëxtraheerd met behulp van eerdere video-opnames van het organisme. De wetenschappers gebruikten de elliptische Fourier-descriptor voor gesloten contouren om de vorm van een hyperelastische zachte robot te beschrijven en vergeleken deze voor het eerst in het onderzoek met een biologisch organisme. De elliptische Fourier-descriptor werd in vier hoofdstappen geëxtraheerd om de vorm van het object te schatten. De hoeveelheid variantie in de vorm vastgelegd door een eigenvector werd gebruikt om de overeenkomst in vorm tussen de robot en het organisme kwantitatief te meten. De vorm van de euglenoïden werd duidelijk gekenmerkt door de eerste drie hoofdcomponenten, terwijl de variantie in de robots over meer componenten was verspreid, wat suggereert dat de extreme vormen van euglenoïden niet volledig werden gereproduceerd in de robots.
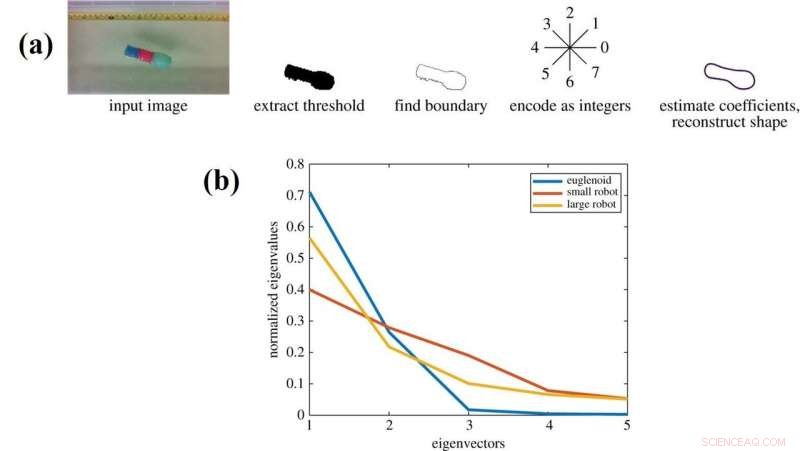
a) De vier stadia van vormschatting. Eerst wordt het interessegebied uit de afbeelding gehaald. Volgende, de grens wordt geïdentificeerd. Deze contour wordt vervolgens gecodeerd als een verzameling Freeman-getallen. Eindelijk, een reeks Fourier-coëfficiënten wordt berekend, en vorm gereconstrueerd. b) Genormaliseerde eigenwaarden van de eerste vijf eigenvectoren die de vorm van de zachte robots beschrijven in vergelijking met de euglenoïde. Krediet:RSIF, doi:10.1098/rsif.2018.0301.
Op basis van de eigenwaarden, de grotere robots reproduceerden vormen dichter bij de euglenoïde in vergelijking met de kleinere robots. De reden voor het waargenomen verschil kan te wijten zijn aan het ontwerp van de plooien van de balg (hyperelastische balgen - HEB's). Parameters van de vouwhoeken, hun aantal en dichtheid kunnen verder worden geoptimaliseerd om een betere vormreplicatie te bereiken. In vergelijking met natuurlijke micro-organismen, de robot produceerde geen soepele verschuiving bij het overbrengen van vloeistof van de ene kamer naar de andere, mogelijk omdat de synthetische grenswand, ondanks zijn elasticiteit, de uitzetting van de kamer lokaal kan beperken. Dit kan ook het onvermogen van de robot verklaren om extreme vormen aan te nemen.
Als geheel, de multi-segment zachte robot EuMoBot kan naast zwemmen ook euglenoïde bewegingen nabootsen met vormverandering en voortbeweging in niet-vloeibare omgevingen, waardoor de zachte en zelfgenoegzame robot kan werken in krappe ruimtes. Er is extra werk nodig om de relatie tussen hoofdcomponenten en voortbewegingsvermogen te begrijpen. Het aantal vormen dat de EuMoBots vertoonden, was beperkt vanwege de treksterkte van het bijbehorende materiaal en het monolithische ontwerp van het apparaat. Alternatieve fabricagetechnieken zoals 3D-printen en zachte lithografie kunnen de grenzen van materiaalelasticiteit aanpakken. De robots kunnen ook worden ontworpen om met wiskundige nauwkeurigheid op euglenoïden te lijken door de microscopische schilstructuur die inherent is aan het organisme te repliceren voor een soepelere overgang tijdens voortbeweging. De mogelijkheid om te sturen kan worden opgenomen in het ontwerp van de robot met geactiveerde spoelen van een vormgeheugenlegering of met behulp van beperkingen op het materiaal met geïnternaliseerde krachtbronnen voor veerkrachtige, geminiaturiseerde apparaten in toekomstig werk.
© 2018 Wetenschap X Netwerk
 Het voorkomen van zuurstofafgifte leidt tot veiligere batterijen met een hoge energiedichtheid
Het voorkomen van zuurstofafgifte leidt tot veiligere batterijen met een hoge energiedichtheid- Upcyclingproces brengt nieuw leven in oude jeans
- Nieuwe inzichten in bacteriële toxines
- Chemici ontwikkelen een raamwerk om een efficiënte synthese van informatierijke moleculen mogelijk te maken
- De synthese van de bacteriële celwand in realtime volgen
- Target Earth - hoe asteroïden een impact hebben gehad op Australië
- Mensen beschouwen de gezondheidsrisico's van de binnenlucht als groter dan wat wordt gesuggereerd door onderzoeksgegevens
- Houtverbruik bij energieopwekking blijft stijgen
- Waarom is fotosynthese belangrijk voor alle organismen?
- Aanstaande moeders vrezen voor hun ongeborene in het door smog verstikte Delhi
Hoofdlijnen
- Afrika stroperij nu een oorlog, taskforce waarschuwt
- Het gebruik van pinguïns om de gezondheid van de oceaan te monitoren is mogelijk niet effectief
- Waar ontwikkelt een Zygote in planten zich in?
- Zien in het donker - hoe plantenwortels water waarnemen door middel van groei
- Wat doet ethanol in een DNA-extractie?
- Retrovirus versus DNA-virus
- Nieuwe zoomtechniek onthult voor het eerst een elektrisch circuit van cellen
- "What Does Heterozygous Mean?
- Hoe vogelgriep werkt
- Elektrische auto's:de huidige trends zorgen voor een schokkende verandering

- GE snijdt meer dan 1, 000 banen in Franse elektriciteitscentrales

- Microsoft aan contractanten:geef nieuwe ouders betaald verlof

- Disney neemt hindernis voor samenwerking met Fox met goedkeuring van Amerikaanse toezichthouder (update)

- Boeing:737 MAX-certificering volgens Amerikaanse regels


 Eet je je smaak met honden? testen, AI testen
Eet je je smaak met honden? testen, AI testen- Door genetisch materiaal op te sporen, snelle sensor heeft potentieel gebruik als klinisch hulpmiddel
- Afbeelding:Testen van de radarantenne voor Juice-ruimtevaartuigen
- Mammoetboom smeult nog steeds van bosbrand in Californië in 2020
- Robotbijen voegen zich bij het internationale ruimtestation
- Hoe klimaatverandering de bouwstenen voor gezondheid beïnvloedt
- Een vereenvoudigde manier om voedselverspilling om te zetten in waterstofenergie
- Hoe NASA te helpen gegevens te verzamelen tijdens de aanstaande zonsverduistering
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
