Wetenschap
RoboTurk:een crowdsourcingplatform voor imitatieleren in robotica
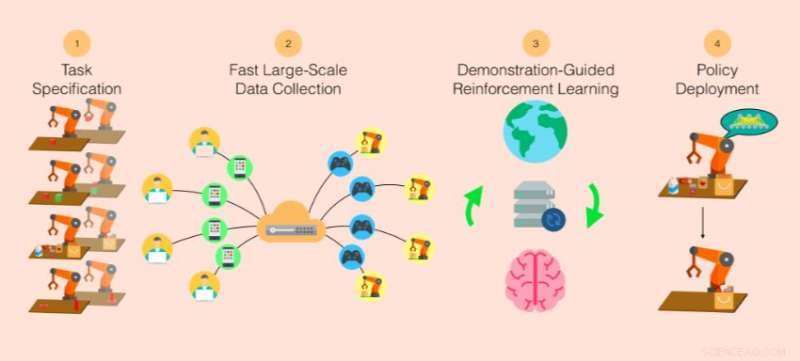
Systeemoverzicht van ROBOTURK. ROBOTURK maakt het mogelijk om snel vaardigheden te leren met behulp van imitatie. Dit systeem bestaat uit de volgende hoofdstappen:1) het specificeren van een taak, 2) het verzamelen van een groot aantal taakdemonstraties met ROBOTURK, 3) het gebruik van door demonstratie versterkt leren om een beleid te leren, en 4) het inzetten van de geleerde vaardigheid in het interessegebied. Krediet:Mandlekar et al.
Imitatieleren is een tak van machine learning die machines traint om menselijk gedrag na te bootsen tijdens het uitvoeren van bepaalde taken. Deze technieken zijn veelbelovend op het gebied van robotica, omdat ze enkele van de tekortkomingen van versterkend leren aanpakken, zoals verkenning en beloningsspecificatie.
Ondanks bemoedigende resultaten, imitatie-leerstudies zijn tot nu toe beperkt tot datasets van bescheiden omvang vanwege problemen bij het verzamelen van grote hoeveelheden taakdemonstraties met behulp van bestaande methoden. Om deze beperkingen aan te pakken, een team van onderzoekers onder toezicht van Dr. Silvio Savarese en Dr. Fei-Fei Li aan de Stanford University hebben RoboTurk ontwikkeld, een crowdsourcingplatform voor hoogwaardige 6-DoF-trajectgebaseerde teleoperaties met behulp van algemeen beschikbare smartphoneapparaten.
"We wilden iets maken als ImageNet voor robotica, "Ajay Mandlekar, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Wij geloven dat data een belangrijke beperking is op het gebied van robotleren. Hoewel er tal van methoden zijn die leren van data, zoals data-gedreven controle en versterking leren, de meeste methoden verzamelen hun eigen gegevens. Als resultaat, de gegevens zijn vaak van lage kwaliteit, bijvoorbeeld doordat de robot zijn arm willekeurig beweegt. Dit soort verkenning kan moeilijk en onveilig zijn, maar we geloven dat mensen kunnen helpen."
ImageNet is een gerenommeerde beelddatabase gemaakt door Dr. Li, vaak gebruikt in onderzoek naar computervisie en objectherkenning. Het crowdsourcingplatform ontwikkeld door Stanford Vision and Learning Lab is ontworpen om te dienen als een vergelijkbare bron voor robotica en imitatieleerstudies.
"In tegenstelling tot ImageNet, zo'n gegevensverzamelingssysteem moest dynamisch zijn, waardoor we herhaaldelijk gegevens kunnen verzamelen, vaak op aanvraag, en misschien zelfs met behulp van samenwerkend leren, "Yuke Zhu, die ook betrokken was bij de ontwikkeling van Roboturk, vertelde TechXplore. "Dit komt omdat de gegevens die worden verzameld afhankelijk zijn van wat voor soort acties de robot in de omgeving onderneemt."
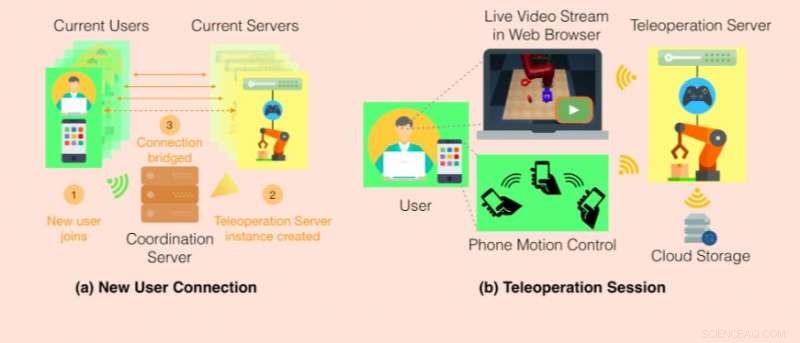
Systeemschema van ROBOTURK. Een nieuwe gebruiker maakt verbinding met een website om lid te worden van het systeem, en een coördinatieserver lanceert een speciale teleoperatieserver voor de gebruiker, zoals weergegeven in (a). De coördinatieserver brengt vervolgens directe communicatiekanalen tot stand tussen de webbrowser van de gebruiker en de iPhone en de teleoperatie-server om de teleoperatie-sessie te starten. De gebruiker bestuurt de gesimuleerde robot door zijn telefoon te bewegen, en ontvangt een videostream als feedback in hun webbrowser, zoals weergegeven in (b). Na elke succesvolle demonstratie de teleoperatie-server duwt de verzamelde gegevens naar een cloudopslagsysteem. Krediet:Mandlekar et al.
Het uiteindelijke doel van de onderzoekers is om robots te trainen in geavanceerde manipulatievaardigheden, waardoor ze taken kunnen uitvoeren binnen industriële omgevingen, zoals verpakking of assemblage. Ze ontdekten dat, hoewel imitatieleren in deze context een groot potentieel vertoonde, bestaande datasets waren zeer beperkt vanwege problemen bij het verzamelen van grote hoeveelheden taakdemonstraties.
"In andere domeinen zoals computervisie en natuurlijke taalverwerking, grootschalig toezicht op datasets wordt vaak verzameld met behulp van crowdsourcing, " zei Mandlekar. "Dit maakt een schaalbaar mechanisme mogelijk voor divers menselijk toezicht op een uitgebreide reeks probleemgevallen. Echter, het verzamelen van grote hoeveelheden gegevens was een uitdaging voor roboticataken, omdat ze realtime interactie en feedback van annotators vragen, het plaatsen van moeilijke beperkingen op externe teleoperatie platforms."
De groep van Stanford Vision and Learning Lab ontwikkelde daarom RoboTurk, een crowdsourcingplatform waarmee onderzoekers de vaardigheden en taken kunnen opschalen die robots autonoom kunnen uitvoeren, door het gebruik van schaalbaar menselijk toezicht. Via Robot Turk, telewerkers kunnen inloggen op een website en taakdemonstraties verzamelen, gebruiken hun smartphone als bewegingscontroller.
"RoboTurk wordt ondersteund door een cloudgebaseerde simulatie-backend die video streamt naar de webbrowser van een klant met behulp van communicatieprotocollen met lage latentie, " legde Mandlekar uit. "Dit zorgt voor een homogene servicekwaliteit, ongeacht de computerbronnen van een klant, resulterend in een platform dat intuïtief te gebruiken is en een lage toetredingsdrempel heeft, wat de kernvereisten zijn van een crowdsourced-taak. RoboTurk ondersteunt meerdere robots, taken, en simulatoren, en kan gemakkelijk worden uitgebreid om anderen te ondersteunen."
De onderzoekers evalueerden hun platform op drie manipulatietaken van verschillende duur, variërend van 15 tot 120 seconden. Ze ontdekten dat RoboTurk statistische overeenkomsten deelde met hardware voor speciale doeleinden, zoals virtual reality-controllers. Ze merkten ook op dat slechte netwerkomstandigheden geen substantiële invloed hadden op het vermogen van gebruikers om taken met succes uit te voeren op het platform. Met behulp van Robot Turk, ze verzamelden 137,5 uur aan manipulatiegegevens van externe werknemers, met meer dan 2200 succesvolle taakdemonstraties in 22 uur totaal systeemgebruik.
Krediet:Mandlekar et al.
"Ik denk dat het meest betekenisvolle deel van het platform is hoe het mensen en robots in staat zal stellen met elkaar om te gaan, "Animish Garg, postdoctoraal student die het project leidt, vertelde TechXplore. "Robots zijn de slimme tools van de toekomst. We moeten ze niet zien als een vervanging voor mensen, maar eerder als een manier om onze capaciteiten uit te breiden. Dit stelt mensen in staat productiever te zijn en zich te concentreren op intelligentieproblemen op een hoger niveau, op dezelfde manier waarop de komst van computers het voor mensen gemakkelijker maakte om wiskunde te gebruiken als een hulpmiddel om interessante problemen op te lossen."
RoboTurk maakt effectief beleidsleren mogelijk voor manipulatietaken in meerdere stappen met geringe beloningen. In aanvulling, Mandlekar en zijn collega's ontdekten dat het gebruik van grotere hoeveelheden demonstraties tijdens beleidsleren opmerkelijke voordelen had, wat leidt tot betere prestaties en een grotere leerconsistentie.
In de toekomst, RoboTurk kan een belangrijke hulpbron worden op het gebied van robotica, helpen bij de ontwikkeling van meer geavanceerde en beter presterende robots. De onderzoekers passen RoboTurk nu toe op echte robots, terwijl ze ook algoritmen ontwikkelen die de verzamelde gegevens kunnen gebruiken om robots lage vaardigheden aan te leren.
"Robots zijn een zeer opwindende technologie die mensen in staat zal stellen productiever en onafhankelijker te zijn op alle gebieden van menselijke activiteit, bijvoorbeeld een helpende hand bieden in de keuken, verzorgers voor de senioren, en betere zorg voor patiënten, " Garg zei. "Een van de dingen die ons opwindt is de democratisering van de productie. Deze technologie zou mensen in staat kunnen stellen om op maat gemaakte producten te maken en te verkopen zonder speciale apparatuur, net zoals YouTube het maken en verspreiden van inhoud heeft gedemocratiseerd, zodat iedereen video's kan maken en delen."
© 2018 Wetenschap X Netwerk
 Wetenschappers voorspellen een nieuw superhard materiaal met unieke eigenschappen
Wetenschappers voorspellen een nieuw superhard materiaal met unieke eigenschappen- De juiste ertskeuze kan leiden tot lagere emissies
- Onderzoek naar de elektronische neus voor het bewaken van de luchtkwaliteit, diagnose van ziekte
- Reparatie van kuilen milieuvriendelijk gemaakt met gruis van afvalwaterzuivering
- Wetenschapsprojecten met Dawn Dishwashing Liquid
- Stijgende zeeën en smeltende gletsjers zijn nu onomkeerbaar, maar we moeten handelen om ze te vertragen
- De dagen worden iets langer als het landijs smelt
- Veganistisch is het nieuwe vegetarisch - waarom supermarkten plantaardig moeten gaan om de planeet te redden
- Arctisch onderzoek om licht te werpen op organismen die essentieel zijn voor de voedselketen
- Fukushima:lessen getrokken uit een buitengewoon geval van bodemsanering
Hoofdlijnen
- Wetenschappers zoeken naar overlevenden nadat de Thomas-brand een condorreservaat heeft verschroeid
- Hoe bijen hun weg naar huis vinden
- Uitbreidingen van het cytoplasma
- Kaarten uit de Eerste Wereldoorlog helpen de geschiedenis van kelpbossen in Pacific Northwest te volgen
- Hoe een cellenvorm zijn functie beïnvloedt
- Duplicaties van niet-coderend DNA kunnen de evolutie van mensspecifieke eigenschappen hebben beïnvloed
- Atrazine verandert de sex-ratio in Blanchards krekelkikkers
- Chimpstudie onthult hoe de hersenstructuur onze evolutie heeft gevormd
- Hoe Facebook kraakt over nepnieuws (en waarom nepnieuws werkt)






 Zweedse onderzoekers stimuleren minder vliegen, met nieuwe tool om klimaatimpact onder de aandacht te brengen
Zweedse onderzoekers stimuleren minder vliegen, met nieuwe tool om klimaatimpact onder de aandacht te brengen- Meest gedetailleerde röntgenfoto van batterijen tot nu toe om te laten zien waarom ze nog steeds niet goed genoeg zijn
- Supersnel breedband kan negatieve bijwerkingen hebben voor bedrijven
- Uitbreiding van traceerbare metingen in het menselijk lichaam
- Hoe de dichtheid van een persoon te meten
- Top Australische universiteit meldt enorme, geavanceerde hack
- Draadloos drukgevoelig oogimplantaat kan blindheid helpen voorkomen
- Patentgesprek:apparaat voor plasmacompressiefusie wekt nieuwsgierigheid naar kernfusie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
