Wetenschap
UC Berkeley-team geeft springende robot hogere doelen dan bouncy-bouncy
"Precision Jumping Limits from Flight-phase Control in Salto-1P" is de academisch klinkende titel van een paper die niettemin iedereen die geïnteresseerd is in robotbewegingen zou moeten bekoren.
Justin Yim en Ronald vrezen, Vakgroep Elektrotechniek en Computerwetenschappen, Universiteit van Californië, Berkeley, zijn de auteurs van de krant. Hun werk werd eerder deze maand gepresenteerd op IROS 2018 in Madrid.
Dit is een monopedale robot, genaamd Salto-1P. Video-aantekeningen beschreven Salto-1P verder als een kleine monopedaal springende robot die in staat is om continu met hoog vermogen te springen.
Waarom noemen ze het Salto? James Holloway in Nieuwe Atlas bevredigde de nieuwsgierigen. Saltatorial Locomotion op Terrain Obstacles is het antwoord, wat "saltatoriaal" ook betekent. Holloway en Google hielpen daar ook.
Saltatorial betekent aangepast in de richting van springen. Saltus is een Latijns woord voor sprong.
Werkelijk, kijken naar een eenbenige robot die in een non-stop razernij rondspringt, is vreemd genoeg om zichzelf mee te slepen. Echter, de onderzoekers van UC Berkeley hadden meer gerichte bewegingen in gedachten. Het team is vastbesloten om een robot af te leveren die kan springen, zodat hij precies weet waar hij vervolgens landt.
"Twee kleine propellers zorgen ervoor dat de robot in de lucht kan draaien, maar alle aandrijfkracht komt van het enkele been, " zei Hackaday .
Men kan begrijpen IEEE-spectrum ervoor kiezen om het een "robotische pogo-stick" te noemen (maar dat is niet het verhaal; het gaat er eerder om wat de stick nu kan bereiken). De onderzoekers waren niet geïnteresseerd in het bedenken van een hypermachine die zichzelf rondslingerde.
TechCrunch schreef over zijn mogelijkheden:(1) het kan een oppervlak bekijken voor een doelwit, schreef John Biggs, en (2) "vlieg in wezen naar de plaats waar het moet landen met behulp van ingebouwde propellers."
Waarom hun recente werk ertoe doet:het draait allemaal om de controller, die ze hebben geüpgraded om de precisie bij de landing te verbeteren - "een prestatie die bijna onmogelijk was met het vorige controllersysteem, ' zei Biggs.
Evan Ackerman legde uit dat de hardware van Salto-1P hetzelfde is als vorig jaar:één geactiveerd elastisch been voor hop, "een traagheidsstaart die ronddraait om de toonhoogte te regelen, en een halve quadcopter om gieren en rollen onder controle te houden." Maar dit jaar, het draait allemaal om de regelaar.
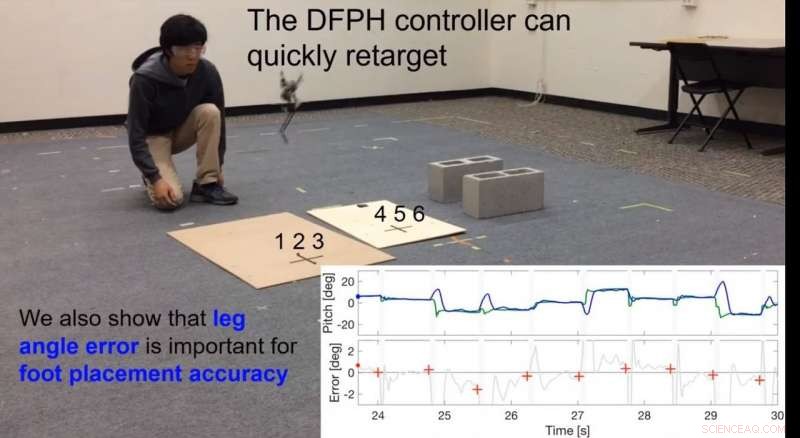
Het doel van het team voor Salto-1P was een betere controller om dingen te doen die nauwkeurige voetplaatsing vereisen. Ackerman zei dat "nog agressiever gedrag, zoals springen tussen muren, omvat een hele reeks sprongen die allemaal nauwkeurig moeten zijn, omdat een enkele onnauwkeurige sprong er waarschijnlijk voor zorgt dat de robot valt en zichzelf aan stukken slaat."
In hun krant de auteurs bespraken hun deadbeat voetplaatsing hopping controle. Wat betekent dat? We zullen, ze hebben te maken met "een nieuw besturingsalgoritme dat de voet van Salto-1P op bepaalde plekken op de grond kan landen, zoals springen op stapstenen of hinkelen op één been." Ze noemen dit "deadbeat foot placement hopping control".
Holloway vertelde Nieuwe Atlas lezers over de aanpak van het team. "De controller gebruikt wat in de wiskunde bekend staat als een Taylor-reeksbenadering, die kan worden gebruikt om antwoorden op complexe vergelijkingen te benaderen, inclusief die regerende krachten die op een punt handelen."
Eindresultaat:een robot die zo is ontworpen dat hij niet zomaar kan huppelen, maar tussen aangewezen plekken kan springen, "alsof je van stapsteen naar stapsteen springt of hinkelt." Het kan op de grond springen, of tussen objecten van toenemende hoogte, zei Holloway.
Hun lijst van wat het volgende werk aan deze springende robot is, omvat het onderzoeken van de effecten van niet-rigide of hellend terrein op springprestaties en controlestrategie. Ook, volgens Ackerman, "We spraken met Justin Yim bij IROS, die ons vertelde dat hij eraan werkt om de springprecisie van Salto-1P nog meer te vergroten, terwijl het ook wordt gespeend van de externe lokalisatie- en computersystemen die het binnenshuis opsluiten."
© 2018 Tech Xplore
 Wetenschappers lossen een magnesiummysterie op in de prestaties van oplaadbare batterijen
Wetenschappers lossen een magnesiummysterie op in de prestaties van oplaadbare batterijen- Leren hoe boor verdampt, zal de technologieën voor waterontzilting verbeteren
- Nieuwe biosensoren detecteren snel coronaviruseiwitten en antilichamen
- Natuurlijke pesticide op basis van silica beschermt gewassen in opslag en kan giftige fosfine elimineren
- Forensisch chemicus gebruikt zweet om personen op plaats delict te onderscheiden
Hoofdlijnen
- Tropische vogel waarschijnlijk uit koers geblazen door orkaan Jose
- Het belang van DNA in de menselijke cel
- Planten kunnen zichzelf verdedigen door rupsen kannibaal te maken
- Nieuwe heremietkreeft gebruikt levend koraal als thuis
- Celkarakteristieken
- Wat zijn schadelijke genen?
- Met uitsterven bedreigde mus in Centraal-Florida die in het wild waarschijnlijk niet zal overleven
- Phototroph (Prokaryote Metabolism): Wat is het?
- Klimaatverandering die de migratiepatronen van gierende kraanvogels beïnvloedt, studie vondsten
- Frankrijk sluit oudste reactoren, maar kernenergie regeert nog steeds

- Facebook gaat 25 MLB-games streamen in exclusieve deal

- Oude Facebook-exec Adam Mosseri nieuw hoofd van Instagram

- Cyberhygiëne beschermt uw e-mail tegen virtuele virussen

- ZTE-aandelen stijgen met 22% naarmate de opheffing van de Amerikaanse sancties een stap dichterbij komt


 Differentiëren van RNA- en DNA-virussen
Differentiëren van RNA- en DNA-virussen - Vrouwen onevenredig zwaar getroffen tijdens pandemie, professor vindt
- Vijf massale uitstervingen - en wat we ervan kunnen leren over de planeet vandaag
- NASA vindt een sterkere Matmo op weg naar aanlanding
- Bedrijven lopen risico op cyberaanvallen, maar nemen weinig voorzorgsmaatregelen
- ATLAS Experiment zoekt nieuwe symmetrieën van de natuur
- Skateboardings DIY-ethos is het begin van een nieuwe golf van stadsvernieuwing
- Waarom de tong van de Pine Island-gletsjer plotseling kromp
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
