Wetenschap
GapFlyt geeft vliegende quadrotors een les in bijen
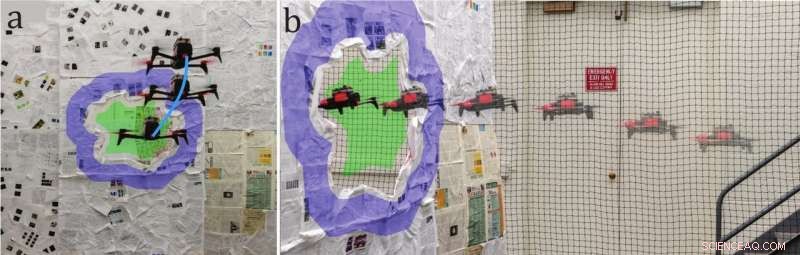
Verschillende delen van de pijplijn:(a) Detectie van de onbekende kloof met behulp van actieve visie en TS2P-algoritme (cyaan markeert het gevolgde pad voor het verkrijgen van meerdere afbeeldingen voor detectie), (b) Opeenvolging van quadrotor die door de onbekende opening gaat met behulp van visuele servobesturing. De blauwe en groene markeringen vertegenwoordigen respectievelijk de gevolgde voorgrond- en achtergrondregio's. Krediet:arXiv:1802.05330 [cs.RO]
Onderzoekers hebben een systeem bedacht dat bio-geïnspireerd is om drones te helpen door kleine openingen te gaan. De onderzoekers testten hun systeem en schreven een analyse in een paper dat is gepubliceerd in IEEE Robotica &Automatiseringsbrieven .
"GapFlyt:Active Vision Based Minimalist Structure-less Gap Detection For Quadrotor Flight" is door Nitin J. Sanket, Chahat Deep Singh, Kanishka Ganguly, Cornelia Fermüller en Yiannis Aloimonos. De auteurs zijn van de Perception and Robotics-groep aan de University of Maryland in College Park.
Ze werkten aan een bio-geïnspireerd ontwerp voor quadrotoren. Dit is een raamwerk dat bedoeld is voor quadrotors om door "onbekende gaten te vliegen zonder een 3D-reconstructie van de scène, " zeiden ze, "met alleen een monoculaire camera en detectie aan boord."
Hun poging om op te merken dat dit allemaal zonder een 3D-reconstructie is, verdient een nadere blik. Ergens anders, ze legden uit dat "Onderzoekers en beoefenaars tegenwoordig traditionele computervisie-algoritmen gebruiken met als doel een representatie van algemene toepasbaarheid te bouwen:een 3D-reconstructie van de scène. Met behulp van deze representatie, planningstaken worden geconstrueerd en uitgevoerd om de quadrotor in staat te stellen autonoom gedrag te vertonen. Deze methoden zijn inefficiënt omdat ze niet taakgericht zijn."
Kijk maar naar vliegende insecten en vogels - het probleem van navigatie en complexe besturing eeuwenlang zelfstandig oplossen, zonder de noodzaak om een 3D-kaart te bouwen, ze zeiden, en zijn zeer taakgericht.
Evan Ackerman IEEE-spectrum mooi een les in bijen gegeven.
"Bijen laten dit werken door een soort minimalistische brute-force-benadering van het probleem:ze vliegen naar een klein gaatje of gat, zweven, dwaal een beetje heen en weer om visuele informatie te verzamelen over waar de randen van de opening, en dan zichzelf erdoorheen sturen. Het is niet snel, en het is niet bijzonder elegant, maar het is betrouwbaar en er is niet veel voor nodig om het uit te voeren."
De titel van hun paper weerspiegelt de vraag die ze als team stelden:"Kan een quadrotor erin slagen om door een willekeurig gevormde opening te gaan zonder een expliciet 3D-model van een scène te bouwen, met alleen een monoculaire camera?"
Ze hebben het op de proef gesteld in experimenten met verschillende instellingen en venstervormen. Het voorgestelde raamwerk werd getest op een aangepaste hobby quadrotor, Papegaai Bebop 2.
IEEE-spectrum droeg een fotobijschrift dat verder beschreef wat ze voor experimenten gebruikten. De gemodificeerde drone, zei het bijschrift, inclusief een NVIDIA TX2-module die aan de bovenkant is gemonteerd. Voor het voelen, de drone gebruikte zijn camera aan de voorzijde en een naar beneden gerichte optische stroomsensor, die een camera plus sonar combineert.
Resultaten? Ze zeiden dat ze "een slagingspercentage van 85% bereikten bij 2,5 m/s, zelfs met een minimale tolerantie van slechts 5 cm."
IEEE-spectrum merkte op dat ze dat succespercentage behaalden in meer dan 150 proeven "voor verschillende willekeurig gevormde vensters onder een breed scala aan omstandigheden, waaronder een venster met een minimale tolerantie van slechts 5 cm."
Wat betreft de maximale snelheid die de drone kon bereiken tijdens het passeren van de opening, 2,5 m/s, Ackerman zei dat het "voornamelijk werd beperkt door de camera met rollende sluiter (die de optische stroom bij hogere snelheden zou kunnen verstoren), maar nogmaals, deze methode is niet echt bedoeld voor high-performance drones."
Waarom hun werk ertoe doet:dit artikel behandelt het probleem van spleetdetectie van een onbekende vorm en locatie met een monoculaire camera en detectie aan boord. Dat is niet te zeggen, de vraag over het doorlopen van hiaten is nieuw. De auteurs wezen erop dat "het probleem van het doorlopen van hiaten onderzoekers al vele jaren fascineert." Onderzoekers elders hebben algoritmen voor planning en controle gepresenteerd en de auteurs zeiden dat sommige werken de weg vrijmaakten voor de bio-geïnspireerde benadering die ze in de paper gebruikten.
© 2018 Tech Xplore
 Nieuwe voorspellingsmodellen kunnen hittegerelateerde sterfgevallen helpen voorkomen
Nieuwe voorspellingsmodellen kunnen hittegerelateerde sterfgevallen helpen voorkomen- Welke onderdelen vormen het menselijk been?
Het menselijke been is een gecompliceerd stuk machines. Het is alleen in staat om zijn werk te doen door de gecompliceerde interactie van verschillende delen. Elk deel van het been bestaat uit zijn eigen
- Eerste VN-gesprekken om oceaanproblemen aan te pakken beginnen maandag
- Chauffeurs zien rood over de groene oorlog van Oslo tegen auto's
- Verwacht minder, maar meer destructieve aan land vallende tropische cyclonen
Hoofdlijnen
- Kenmerken van micro-organismen
- Gebruik je echt maar 10 procent van je hersenen?
- Wetenschappers identificeren sleutelfactoren die microben helpen gedijen in ruwe omgevingen
- De 3 soorten bacteriën
- Het zien van voedsel kan vissen naar het land hebben gelokt
- Biologen maken toolkit voor het afstemmen van genetische circuits
- 10 echt slimme mensen die echt domme dingen deden
- Vrijlating van hagedissen brengt zeldzame soorten terug naar hun natuurlijke habitat in Groot-Brittannië
- Zorgen voor het voortbestaan van olifanten in Laos:een kwestie van economie
- Ingenieurs ontwikkelen nieuwe technieken om objectdetectiesystemen te misleiden

- Boeing-aandelen zakken in doordat de winst van 737 wordt gewogen

- Toyota, China's BYD kondigde elektrische auto-onderneming aan

- Problemen omzetten in kansen in stedelijke gebieden

- Transformatieve 3D-printbenadering vastgesteld op basis van inzicht in ontwikkelingsbiologie

 Bzigo markeert muggen voor de dood
Bzigo markeert muggen voor de dood- Yoga broek, knusse kleding kan de belangrijkste bron van zeevervuiling zijn
- De nieuw ontdekte graven van Egypte bevatten mummies, dieren standbeelden
- Oorlog, wijn en wonderen:hoopvolle kandidaten strijden om plaats op UNESCO-erfgoedlijst
- Schiaparelli crash site in kleur
- Rusland lanceert 73 satellieten in een baan om de aarde
- Hoe werkt calciumchloride smelten ijs?
- Hoe oplosmiddelen te berekenen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
