Wetenschap
Robots die als groep werken, kunnen de optimale volgorde van hun taken bepalen
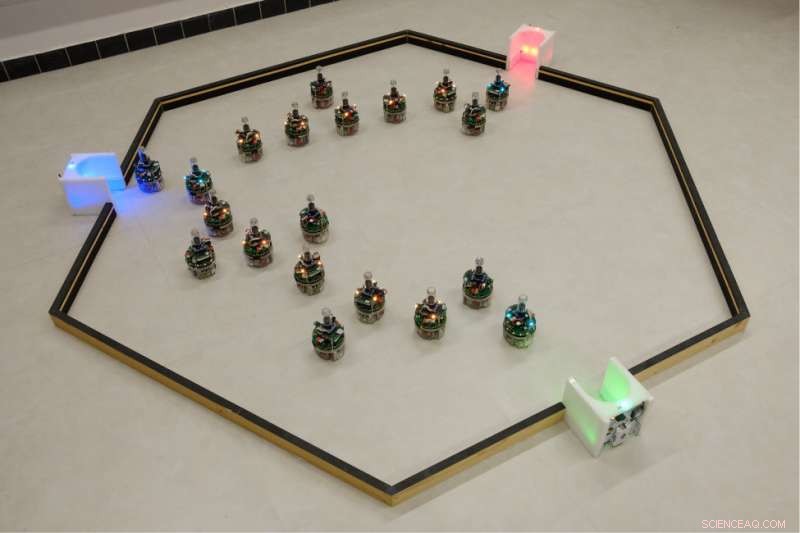
TS-Swarm in zijn arena met drie stands. Krediet:Garattoni en Birattari, Wetenschap. Robot. 3, eaat0430 (2018)
Kunnen robots binnenkort reddingsploegen helpen om de overlevenden van een natuurramp te redden? Zo'n missie zou vereisen dat de robots kunnen bepalen, zelfstandig, welke taken moeten worden uitgevoerd en in welke volgorde; bijvoorbeeld, het heeft geen zin om te proberen een slachtoffer uit het puin te trekken als het puin nog niet is geruimd. Momenteel, ingenieurs zijn verantwoordelijk voor het programmeren van de volgorde van acties. Maar dit kan snel veranderen!
Mauro Birattari en Lorenzo Garattoni, onderzoekers van het IRIDIA-laboratorium (Brussels School of Engineering, Université Libre de Bruxelles), hebben onlangs aangetoond dat robots in staat zijn om gezamenlijk te beslissen in welke volgorde ze hun taken moeten uitvoeren. De resultaten van hun onderzoek zijn gepubliceerd in Wetenschap Robotica deze woensdag, 18 juli.
De onderzoekers van het IRIDIA-laboratorium hebben hun onderzoek gebaseerd op zwermrobotica, een tak van robotica die put uit het collectieve en georganiseerde gedrag van sociale dieren (zoals mieren) om groepen robots te creëren die kunstmatige intelligentie vertonen. Robots zijn momenteel in staat om te communiceren en te coördineren om beslissingen te nemen en eenvoudige taken uit te voeren, zoals het verplaatsen van een object of het kiezen van een van twee paden. Voor hun laatste onderzoek, Mauro Birattari en Lorenzo Garattoni zijn qua complexiteit nog een stap verder gegaan:ze hebben een zwerm robots gecreëerd die een reeks van drie acties kan uitvoeren, zonder vooraf de juiste volgorde te kennen. In praktijk, de robots moesten naar drie verschillende punten in de ruimte gaan, waar ze een eenvoudige taak moesten uitvoeren. Pas nadat de taken waren voltooid, zouden de robots leren of de bestelling correct was. Om dit probleem op te lossen, sommige robots vormen geleidelijk een ketting tussen de drie punten in de ruimte, die de anderen als richtlijn gebruiken bij het testen van de verschillende mogelijke combinaties door de instructies te volgen van de robots die de ketting vormen (zie foto). Eventueel, zij bepalen de juiste volgorde door samen te werken.
Deze studie toont aan, Voor de eerste keer, dat robots in staat zijn om gezamenlijk een reeks acties te bepalen waarvan de vereiste volgorde voorheen onbekend was. Dit vermogen om vooruit te plannen wordt beschouwd als een complexe cognitieve vaardigheid, en het komt voort uit de interacties tussen de individuen in de groep:samen, de robots kunnen een reeks acties plannen, wat geen enkel individu in de groep alleen zou kunnen doen.
Dit onderzoek effent de weg naar een aantal mogelijke toepassingen met een groep 'slimme' robots, d.w.z. robots die zelf problemen kunnen oplossen. Mogelijkheden die de onderzoekers verwachten zijn onder meer het zoeken naar overlevenden na een natuurramp, het verkennen van onbekende of vijandige omgevingen, constructies bouwen op gevaarlijke plaatsen, en diverse toepassingen in de landbouw. Het vermogen - aangetoond in dit onderzoek - om autonoom de volgorde te bepalen waarin taken moeten worden voltooid, is essentieel voor dit soort missies.
Mauro Birattari is laureaat van een ERC Consolidator Grant. Dit onderzoek werd geleid voor het ERC-project "DEMIURGE:automatisch ontwerp van robotzwermen."
 Zwavel verbetert dubbele breking voor het ontwikkelen van vloeibaar-kristallijne moleculen
Zwavel verbetert dubbele breking voor het ontwikkelen van vloeibaar-kristallijne moleculen- Video:Lifehacks voor scheikunde:voedseleditie
- Nieuw oplosmiddel draagt bij aan de volgende generatie biobrandstofproductie uit biomassa
- Koolstofketens nemen fusilli- of spaghetti-vormen aan als ze oneven of even getallen hebben
- Onderzoekers kijken naar schimmel om licht te werpen op kanker
- De gevaren en voordelen van vulkanen in Oost-Afrika volgen
- Wildvuurseizoen:is dit het nieuwe normaal?
- Omgevallen trein geeft inzicht in grondbeweging, oorsprong van de aardbeving van 1906
- Geologen identificeren diepgewortelde structuren die verborgen metalen lodes kunnen signaleren
- Een belangrijke scorecard geeft de gezondheid van de Australische omgeving minder dan 1 op 10
Hoofdlijnen
- High School Biology Experiment Ideas
- El Nino in de Stille Oceaan heeft invloed op dolfijnen in West-Australië
- Chili vecht om een favoriete mossel te redden
- Daling van huismus in verband met luchtvervuiling en slechte voeding
- Hoe een celvorm zijn functie beïnvloedt
- Transformatief onderzoek onrealistisch om te voorspellen, wetenschappers vertellen subsidieverstrekkers
- Soorten organismen die van plantencellen zijn gemaakt
- Ricine alleen dodelijk in combinatie met suiker
- Wetenschappers roepen op tot actie om de dreiging van invasieve boomsoorten voor een wereldwijde hotspot voor biodiversiteit aan te pakken





 China's app voor het delen van fietsen Ofo haalt $ 850 miljoen op om overzee uit te breiden
China's app voor het delen van fietsen Ofo haalt $ 850 miljoen op om overzee uit te breiden- Onderzoek:het verwijderen van rotte appels van politiediensten zal het aantal klachten over geweldgebruik waarschijnlijk niet significant verminderen
- COVID-19-apps voor het traceren van contacten:acht privacyvragen die overheden zouden moeten stellen
- Kinderen verdienen antwoord op hun vragen over klimaatverandering:hoe universiteiten kunnen helpen
- Chemische opslag van hernieuwbare energie
- Onderzoekers verkennen snoekbaarzen voor aquacultuur
- Onderzoekers ontwikkelen CRISPR om enkele RNA-letters in menselijke cellen te bewerken
- PH-waarden in Shampoos
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Norway | Spanish | Danish |

-
Wetenschap © https://nl.scienceaq.com
