Wetenschap
Zelfrijdende auto's en mensen krijgen te maken met onvermijdelijke botsingen
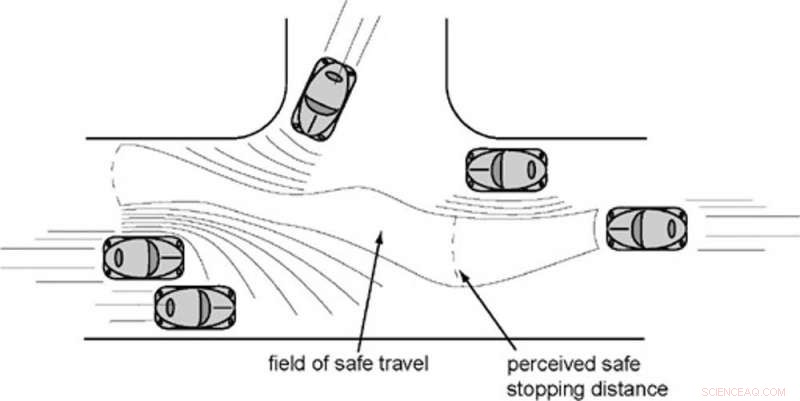
De bestuurder van de auto aan de rechterkant beoordeelt een veilige weg door obstakels op basis van zijn bewegingen en waargenomen remafstanden. Credit:Aangepast van Gibson en Crooks door Steven Lehar
1938, toen er ongeveer een tiende van het aantal auto's op de Amerikaanse wegen was zoals er nu is, een briljante psycholoog en een pragmatische ingenieur bundelden hun krachten om een van de meest invloedrijke werken te schrijven die ooit over autorijden zijn gepubliceerd. De dood van een voetganger in Arizona door een zelfrijdende auto laat zien hoe hun werk vandaag de dag nog steeds relevant is, vooral met betrekking tot de veiligheid van geautomatiseerde en autonome voertuigen.
James Gibson, de psycholoog in kwestie, en de ingenieur Laurence Crooks, zijn partner, evalueerde de beheersing van een voertuig door een bestuurder op twee manieren. De eerste was het meten van wat zij de "minimale stopzone, " de afstand die nodig is om te stoppen nadat de bestuurder op de rem heeft getrapt. De tweede was om te kijken naar de psychologische perceptie van de bestuurder van de mogelijke gevaren rond het voertuig, die ze het 'veld van veilig reizen' noemden. Als iemand zo reed dat alle potentiële gevaren buiten het bereik waren dat nodig was om de auto te stoppen, die persoon reed veilig. Onveilig rijden, anderzijds, hield in dat hij zo snel reed of zo grillig stuurde dat de auto niet kon stoppen voordat hij mogelijk de geïdentificeerde gevaren raakte.
Echter, dit gebied van veilig reizen is niet hetzelfde voor auto's zonder bestuurder. Ze nemen de wereld om hen heen waar met behulp van lasers, radar, GPS en andere sensoren, naast hun ingebouwde camera's. Hun waarnemingen kunnen dus heel anders zijn dan die voor menselijke ogen. Tegelijkertijd, hun actieve responstijden kunnen veel sneller zijn – of soms zelfs extreem traag, in gevallen waarin menselijke tussenkomst vereist is.
Ik heb uitgebreid geschreven over de aard van menselijke interactie met technologie, vooral met betrekking tot de komende golf van geautomatiseerde auto's. Het is mij duidelijk dat, als mensen en machines alleen rijden volgens hun respectievelijke – en significant verschillende – waarnemings- en reactievermogens, dan zullen conflicten en botsingen bijna onvermijdelijk zijn. Om de weg veilig te delen, beide partijen zullen de ander veel beter moeten begrijpen dan nu het geval is.
Samenspel van beweging en uitzicht
Voor menselijke chauffeurs, visie is koning. Maar wat bestuurders zien, hangt af van hoe ze de auto verplaatsen:remmen, accelereren en sturen veranderen de positie van de auto en daarmee het zicht van de bestuurder. Gibson begreep dat deze wederzijdse afhankelijkheid van waarneming en actie betekende dat wanneer ze geconfronteerd werden met een bepaalde situatie op de weg, mensen verwachten dat anderen zich op specifieke manieren gedragen. Bijvoorbeeld, een persoon die een auto ziet aankomen bij een stopbord zou verwachten dat de bestuurder de auto stopt; kijk om je heen voor tegenliggers, voetgangers, fietsers en andere obstakels; en ga alleen verder als de kust veilig is.
Er bestaat duidelijk een stopbord voor menselijke chauffeurs. Het geeft hen de kans om goed om zich heen te kijken zonder afgeleid te worden door andere aspecten van autorijden, zoals sturen. Maar een autonoom voertuig kan in een fractie van een seconde zijn hele omgeving aftasten. Hij hoeft niet per se te stoppen - of zelfs te vertragen - om veilig over het kruispunt te navigeren. Maar een autonome auto die door een stopbord rolt zonder zelfs maar te pauzeren, wordt als alarmerend ervaren, en zelfs gevaarlijk voor mensen in de buurt, omdat ze aannemen dat menselijke regels nog steeds gelden.
Wat machines kunnen begrijpen?
Hier is nog een voorbeeld:denk aan auto's die vanuit een zijstraat invoegen op een drukke verkeersader. Mensen weten dat oogcontact maken met een andere bestuurder een effectieve manier kan zijn om met elkaar te communiceren. In een gesplitst gedeelte, één bestuurder kan toestemming vragen om in te schakelen en de andere bestuurder kan bevestigen dat ja, ze zal toegeven om ruimte te maken. Hoe moeten mensen deze interactie precies hebben met een zelfrijdende auto? Het is iets dat nog moet worden vastgesteld.
Voetgangers, fietsers, motorrijders, automobilisten en vrachtwagenchauffeurs zijn allemaal in staat om te begrijpen wat andere menselijke chauffeurs waarschijnlijk zullen doen - en om hun eigen bedoelingen op gepaste wijze aan een andere persoon te uiten.
Een automatisch voertuig is een heel ander verhaal. Het zal weinig of niets weten van de "kan ik?" "Ja, OK" soorten informele interactie die mensen elke dag aangaan, en zal alleen worden geplakt met de specifieke regels die het is verstrekt. Aangezien maar weinig algoritmen deze impliciete menselijke aannames kunnen begrijpen, ze zullen zich anders gedragen dan mensen verwachten. Sommige van deze verschillen lijken misschien subtiel, maar sommige overtredingen, zoals het stopteken zetten, kan letsel of zelfs de dood veroorzaken.
Bovendien, auto's zonder bestuurder kunnen effectief worden verblind als hun verschillende sensorische systemen worden geblokkeerd, defecten of tegenstrijdige informatie verstrekken. Bij de dodelijke crash van een Tesla in 2016 in "Autopilot"-modus, bijvoorbeeld, een deel van het probleem kan een conflict zijn geweest tussen sommige sensoren die een trekker-oplegger aan de overkant van de weg hadden kunnen detecteren en andere die dat waarschijnlijk niet deden omdat deze van achteren verlicht was of te hoog boven de grond. Deze mislukkingen kunnen nogal verschillen van de tekortkomingen die mensen van medemensen zijn gaan verwachten.
Zoals met alle nieuwe technologieën, er zullen ongelukken en problemen zijn – en op de wegen, dat zal bijna onvermijdelijk leiden tot letsel en de dood. Maar dit soort problemen is niet uniek voor zelfrijdende auto's. Liever, het is misschien inherent aan elke situatie waarin mensen en geautomatiseerde systemen ruimte delen.
Dit artikel is oorspronkelijk gepubliceerd op The Conversation. Lees het originele artikel. 
 Bacteriën gebruiken om een waterfilter te maken dat bacteriën doodt
Bacteriën gebruiken om een waterfilter te maken dat bacteriën doodt- Wetenschapsexperimenten op pH-niveaus
- Studie effent de weg voor nieuwe lichtgevoelige materialen
- Hoe je roest reinigt uit een gootsteenafvoer rond een flens
- Comb breathalyzer is nu duizendmaal gevoeliger voor biomarkers voor ziekten
- Geologen leveren bewijs dat een reeks stormen uitgebreide erosie van het Carpinteria-zoutmoeras heeft veroorzaakt
- Hoe recycling eigenlijk wordt gesorteerd, en waarom Australië er zo slecht in is
- Hoe een model te bouwen Tornado
- Hoe gedragen olifanten zich?
- Turbulentie beïnvloedt aërosolen en wolkenvorming
Hoofdlijnen
- Het zijn voornamelijk moeders die mitochondriën doorgeven - en een nieuwe theorie zegt dat dit te wijten is aan het eerste seksuele conflict
- De evolutionaire oorsprong van de darm
- Betere mensen maken - Het huwelijk tussen mens en machine
- Hoe Brain Mapping werkt
- Instrumenten gebruikt in de biologie
Biologen en biologiestudenten gebruiken verschillende instrumenten in hun werk om kennis over levende wezens te verzamelen. Deze instrumenten en hulpmiddelen worden elk jaar gedetailleerder en hightech, evenals
- Nadelen en voordelen van een HPLC
- Nieuwe oude dolfijnsoort Urkudelphis chawpipacha ontdekt in Ecuador
- Hoe vogelgenetica zich aanpast aan klimaatverandering
- Pharmacy Research Topics
- Bitcoin minen verbruikt meer energie dan Denemarken:studie

- Nieuw beveiligingssysteem om de privacy van communicatie te revolutioneren

- General Electric verlaagt dividend omdat het enorme verliezen meldt

- Transformatorkamers en robo-meubels zullen onze huizen en levens opnieuw vormgeven

- Toekomst van mobiliteit:enkele wilde ritten vooruit op tech show


 Het ontbrekende getal in een vergelijking vinden
Het ontbrekende getal in een vergelijking vinden- NASA ziet tropische storm Norma de branding in Mexico doen oplaaien
- Wat is het verschil tussen een R410- en een R22-compressor?
- Chemicaliënvrij, goedkope opbergzakken voor gewassen die voedsel langer bewaren nu in de handel verkrijgbaar
- Maakt klimaatverandering orkanen al sterker?
- Nieuwe technieken rekken koolstofnanobuizen, sterkere composieten maken
- De VS is de grootste uitstoter van koolstof in de geschiedenis. Waar staan andere naties?
- Verschil tussen Nylon 6 en Nylon 66
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Dutch | Danish | Norway | Swedish | German |

-
Wetenschap © https://nl.scienceaq.com
