Wetenschap
Ongewervelde dieren inspireren eerste volledig 3D-geprinte actieve materialen voor robots
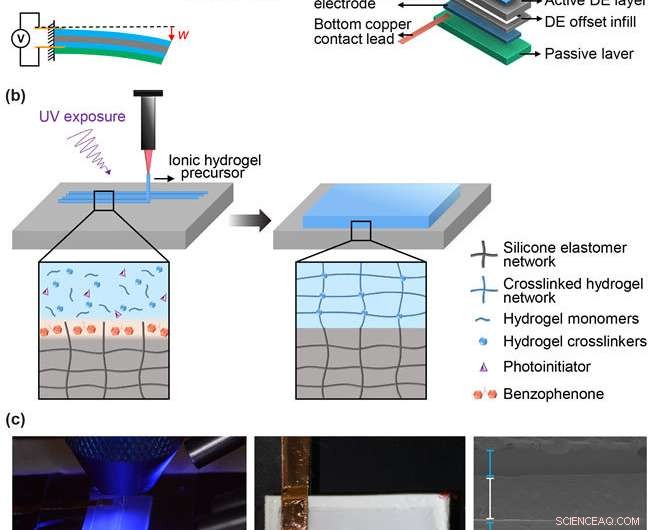
(a) Schematische voorstelling van een zacht actuatorapparaat (links) en opengewerkte weergave van het apparaat en de samenstellende materiaallagen (rechts). (b) Schematische voorstelling van het afzetten (3D-printen) van hydrogel op het oppervlak van een siliconenlaag na oppervlaktebehandeling en onder blootstelling aan UV-licht. (c) Afdrukken van de ionische hydrogel op de passieve laag na oppervlaktebehandeling (links), definitieve 3D-geprinte DEA (midden), en microstructuurafbeelding van de doorsnede van het apparaat (rechts). Krediet:Amerikaanse leger
Om de materiële stijfheid en bedieningsbeperkingen in de huidige robotsystemen te overwinnen, een gezamenlijk onderzoekslaboratorium van het Amerikaanse leger en een onderzoeksproject van de Universiteit van Minnesota zocht inspiratie bij ongewervelde dieren.
Het Amerikaanse leger gebruikt robots die structureel stijf zijn, waardoor ze onpraktisch zijn bij het uitvoeren van militaire operaties in zeer drukke en betwiste stedelijke omgevingen, waar heimelijk manoeuvreren cruciaal is voor het verkrijgen van militaire superioriteit.
"Succesvol sluipend manoeuvreren vereist een hoge structurele flexibiliteit en distributieve controle om in krappe of beperkte ruimtes te sluipen, werken voor langere perioden en emuleren biologische morfologieën en aanpassingsvermogen, " zei Dr. Ed Habtour, ARL-onderzoeker gespecialiseerd in niet-lineaire structurele dynamica.
Volgens Habtour, huidige militaire robots hebben twee belangrijke beperkingen die hen ervan weerhouden de voortbeweging van biologische organismen na te bootsen.
Eerst, deze robots missen de nodige dynamische flexibiliteit, omdat ze meestal zijn geassembleerd met stijve mechanische en elektronische componenten.
Tweede, starre robots vereisen complexe mechanismen en elektrische circuits om actieve bediening en complexe bewegingsmodi te bereiken.
Om deze beperkingen te overwinnen, een gezamenlijk onderzoeksproject van ARL en UMN zocht inspiratie bij ongewervelde dieren.
Deze onderzoeksinspanning leidde tot de creatie van prototypes van zachte actuatoren met behulp van actieve materialen met opmerkelijk afstembare parameters, zoals structurele flexibiliteit, morfologie en dynamische bediening.
Het prototype is de eerste volledig 3D-geprinte diëlektrische elastomeeractuator, of DEA, die een hoge buigbeweging kan uitvoeren.
De 3D-geprinte DEA's vertoonden aanzienlijk grotere doorbuigingen, drie keer meer dan andere recente voorbeelden in de wetenschappelijke literatuur.
Deze resultaten zijn gepubliceerd in Extreme Mechanica-letters (EML) in een paper getiteld:"3D-geprinte elektrisch aangedreven zachte actuatoren", 2018.
“In de beginfase van het project ons team begon met het onderzoeken van nieuwe methoden voor het nabootsen van de voortbeweging van ongewervelde dieren, die fundamentele inzichten opleverden in de machines van hun zachte gedistribueerde bedieningscircuits die hoge buigbewegingen mogelijk maken zonder skeletondersteuning, " zei professor Michael McAlpine van UMN.

Dr. Ed Habtour werkt in het Directoraat Voertuigtechnologie van het Amerikaanse legeronderzoekslaboratorium, waar hij zich specialiseert in niet-lineaire dynamische systemen. Credit:foto van het Amerikaanse leger door Conrad Johnson
Het begrijpen van de aangeboren mechanismen van de distributieve activering die in de natuur wordt waargenomen, hielp het team de belangrijke parameters te identificeren die kunnen worden gemanipuleerd om nieuwe functies te bereiken, zoals het bereiken van zeer flexibele bewegingsmodi.
Volgens McAlpine, om wetenschappelijk inzicht te krijgen in het belang van deze parameters, het was noodzakelijk om eerst een prototype te bouwen en te testen dat lijkt op actuatoren die in de natuur worden gevonden via een op maat gemaakt 3D-printplatform, en om vervolgens een uniform wiskundig model te ontwikkelen om de gevoeligheid van elke parameter te bestuderen en de verschillende optimale activeringsmechanismen te voorspellen.
UMN 3D-geprinte gedistribueerde activeringsschakelingen met zachte, rekbare materialen met mechanische eigenschappen vergelijkbaar met biologische organismen zoals koppotigen en wormen.
ARL creëerde een gegeneraliseerd model met behulp van een energetische formuleringsbenadering, wat de sleutel was bij het identificeren van twee belangrijke mechanismen voor het mogelijk maken van hoge buigbewegingen in zachte biologische actuatoren:(i) het afstemmen van fysieke eigenschappen (mechanisch en geometrisch) door gebruik te maken van het samenspel tussen de materialen en dynamische niet-lineariteiten om de beweging te vergroten; en (ii) het benadrukken van de elektromechanische koppeling tussen het elektrische veld en niet-lineaire structurele stijfheid via de distributieve bedieningsschakelingen.
"De onderzoeksresultaten vormen een belangrijke opstap om de Solider een autonoom freeform fabricageplatform te bieden - de volgende generatie 3D-printer, die functionele materialen en apparaten kan printen - om op verzoek zachte actuatoren en mogelijk tetherless zachte robots te genereren, on-the-fly en op het moment van nood, ' zei Habtour.
Habtour merkte op dat het onderzoek ook suggereert dat zachte actuatoren uitstekende kandidaten kunnen zijn voor autonome additieve productie op het slagveld.
"In tegenstelling tot de huidige 3D-geprinte DEA's, de nieuwe fabricagemethode vereist geen nabewerkingsstappen, zoals montage, drogen of gloeien, " zei hoofdauteur Ghazaleh Haghiashtiani. "Met de nieuwe 3D-printmethode, de Solider kan profiteren van de unieke activeringseigenschappen van zachte DEA's op het niveau van de fundamentele materialen met een resolutie en complexiteit op microschaal, met minimale voorafgaande expertise."
Wat de volgende stappen betreft, Habtour zei dat het de bedoeling is om de experimentele en theoretische principes te ontwikkelen die het samenspel tussen interne interfaces en kinetiek van interacties in tijdvariante systemen die worden waargenomen in biologische organismen, regelen. die zorgen voor hun flexibele voortbeweging en veerkracht.
"De intrigerende interacties tussen de micromechanische eigenschappen van de materialen en verschillende niet-lineariteiten kunnen nieuwe wetenschappelijke mogelijkheden bieden om de symbiotische interacties in biologische systemen na te bootsen, Habtour zei. "Als we deze interacties kunnen begrijpen, dan kunnen we die inzichten gebruiken om dynamische structuren en flexibele robots te fabriceren die zijn ontworpen om zelfbewust te zijn, zelfgevoelig en in staat om hun morfologieën en eigenschappen in realtime aan te passen om zich aan te passen aan een groot aantal externe en interne omstandigheden."
Hiermee, Habtour verklaarde dat de implicaties het ontdekken van opkomende dynamiek van levende structuren zullen zijn en deze zullen emuleren, het zelfstandig fabriceren van functioneel complexe structuren en apparaten, en het benutten van nieuwe bedieningsmodi die niet haalbaar zijn in conventionele robot- en mechanische systemen.
 Wetenschappers ontdekken nieuwe structuren in het kleinste ijsblokje
Wetenschappers ontdekken nieuwe structuren in het kleinste ijsblokje- Cactuswortels inspireren tot creatie van waterhoudend materiaal
- Nieuwe chip meet meerdere cellulaire reacties om het ontdekken van medicijnen te versnellen
- Zelfassemblerende peptiden en de strijd tegen obesitas en diabetes
- Wetenschappers testen met succes nieuwe, veiligere titaniumplaat voor herstel van botweefsel
Hoofdlijnen
- Voorbeelden van diffusie in organen
- Vergroening van citrusvruchten behandelen met koper:effecten op bomen, bodems
- Kan slapen me gelukkig maken?
- Familiebanden Snapper leveren nieuw bewijs op over mariene reservaten
- Wat zijn de twee belangrijkste functies van nucleïnezuur in levende wezens?
Nucleïnezuren zijn kleine stukjes materie met grote rollen om te spelen. Genoemd naar hun locatie - de kern - deze zuren dragen informatie die cellen helpt bij het maken va
- Waar bevinden zich lipiden in het lichaam?
- Onderzoek naar de levensstijl van microben
- Namen van de Enzymen in de Mond & Esophagus
- Nieuwe statistische methode voor het evalueren van reproduceerbaarheid in studies van genoomorganisatie
- Facebook verwerpt Australische media-oproepen voor regulering

- Wereldrecord:efficiëntie van perovskiet-silicium tandemzonnecel springt naar 29,15%

- Amazon onttroont Google als wereldwijd topmerk:enquête

- Onderzoekers verbeteren de beveiliging in het bewijs van blockchain-protocollen van de inzet

- Doorzichtige film verwerpt 70 procent van de binnenkomende zonnewarmte


 Ingenieurs van Yale ontwikkelen nieuw type mechanisch geheugen
Ingenieurs van Yale ontwikkelen nieuw type mechanisch geheugen- Onderzoeksteam presenteert nieuw type deeltjesversneller
- Croc-spotting drone-patrouille stijgt op in Down Under
- Een defecte of zwakke cel in een 12-volt batterij repareren
- Hoe toxoplasmose immuuncellen uitbuit om de hersenen te bereiken?
- Menigten pakken stranden terwijl Californië in de hittegolf van het weekend bakt
- Belang van weerinstrumenten
- Sony springt in Japanse taximarkt met AI-app-plannen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
