Wetenschap
Een nieuwe manier om automatisch wegenkaarten te maken van luchtfoto's
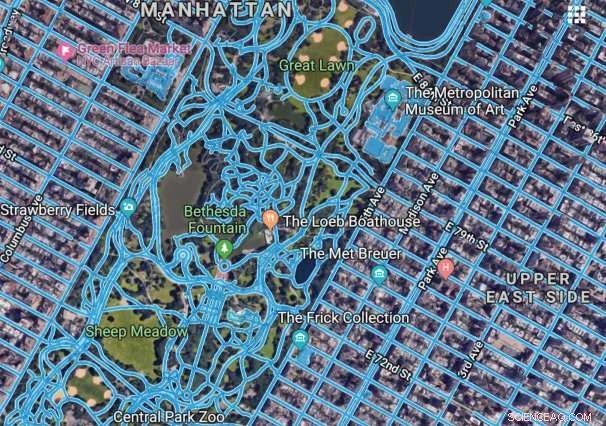
Om complete wegenkaarten te maken, moeten bedrijven als Google medewerkers vaak bestaande luchtfoto's met onvolledige informatie laten maken en de gaten handmatig opvullen. Krediet:Massachusetts Institute of Technology
Kaart-apps hebben onze wereld misschien veranderd, maar ze hebben nog niet alles in kaart gebracht. specifiek, wegen in kaart brengen kan moeilijk en vervelend zijn:zelfs na het maken van luchtfoto's, bedrijven zijn nog vele uren bezig met het handmatig opsporen van wegen. Als resultaat, zelfs bedrijven als Google zijn er nog niet in geslaagd om de overgrote meerderheid van de meer dan 20 miljoen mijl aan wegen over de hele wereld in kaart te brengen.
Hiaten in kaarten zijn een probleem, met name voor systemen die worden ontwikkeld voor zelfrijdende auto's. Het probleem aankaarten, onderzoekers van MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) hebben RoadTracer gemaakt, een geautomatiseerde methode om wegenkaarten te bouwen die 45 procent nauwkeuriger is dan bestaande benaderingen.
Met behulp van gegevens uit luchtfoto's, het team zegt dat RoadTracer niet alleen nauwkeuriger is, maar kosteneffectiever dan de huidige benaderingen. MIT-professor Mohammad Alizadeh zegt dat dit werk nuttig zal zijn voor zowel technische giganten als Google als voor kleinere organisaties zonder de middelen om grote hoeveelheden fouten in kaarten te beheren en te corrigeren.
"RoadTracer is zeer geschikt om gebieden van de wereld in kaart te brengen waar kaarten vaak verouderd zijn, die zowel plaatsen met een lagere bevolking omvat als gebieden waar veel wordt gebouwd, " zegt Alizade, een van de co-auteurs van een nieuw artikel over het systeem. "Bijvoorbeeld, bestaande kaarten voor afgelegen gebieden zoals het landelijke Thailand missen veel wegen. RoadTracer zou kunnen helpen om ze nauwkeuriger te maken."
Bijvoorbeeld, kijken naar luchtfoto's van New York City, RoadTracer kon 44 procent van zijn kruispunten correct in kaart brengen, wat meer dan twee keer zo effectief is als traditionele benaderingen op basis van beeldsegmentatie die slechts 19 procent in kaart konden brengen.
De krant, die in juni zal worden gepresenteerd op de Conference on Computer Vision and Pattern Recognition (CVPR) in Salt Lake City, Utah, is een samenwerking tussen CSAIL en het Qatar Computing Research Institute (QCRI).
Alizadeh's MIT co-auteurs zijn onder meer afgestudeerde studenten Fayven Bastani en Songtao He, en professoren Hari Balakrishnan, Sam Madden, en David De Witt. QCRI co-auteurs zijn onder meer senior software engineer Sofiane Abbar en Sanjay Chawla, wie is de onderzoeksdirecteur van QCRI's Data Analytics Group.
De huidige inspanningen om kaarten te automatiseren, omvatten het trainen van neurale netwerken om naar luchtfoto's te kijken en individuele pixels te identificeren als "weg" of "niet-weg". Omdat luchtbeelden vaak dubbelzinnig en onvolledig kunnen zijn, dergelijke systemen vereisen ook een nabewerkingsstap die is gericht op het opvullen van enkele van de lacunes.
Helaas, deze zogenaamde "segmentatie"-benaderingen zijn vaak onnauwkeurig:als het model een pixel verkeerd labelt, die fout wordt versterkt in de uiteindelijke routekaart. Fouten zijn vooral waarschijnlijk als de luchtfoto's bomen, gebouwen, of schaduwen die verduisteren waar wegen beginnen en eindigen. (De nabewerkingsstap vereist ook het nemen van beslissingen op basis van aannames die niet altijd standhouden, zoals het verbinden van twee wegsegmenten simpelweg omdat ze naast elkaar liggen.)
In de tussentijd, RoadTracer maakt stap voor stap kaarten. Het begint op een bekende plaats op het wegennet, en gebruikt een neuraal netwerk om de omgeving te onderzoeken om te bepalen welk punt waarschijnlijk het volgende deel van de weg is. Het voegt dan dat punt toe en herhaalt het proces om het wegennet stap voor stap geleidelijk te traceren.
"In plaats van duizenden verschillende beslissingen tegelijk te nemen over de vraag of verschillende pixels delen van een weg vertegenwoordigen, RoadTracer richt zich op het eenvoudigere probleem om uit te zoeken welke richting te volgen bij het starten vanaf een bepaalde plek waarvan we weten dat het een weg is, "zegt Bastani. "Dit komt in veel opzichten eigenlijk veel dichter bij hoe wij als mensen mentale modellen van de wereld om ons heen construeren."
Het team trainde RoadTracer op luchtfoto's van 25 steden in zes landen in Noord-Amerika en Europa, en evalueerde vervolgens zijn kaartvaardigheden op 15 andere steden.
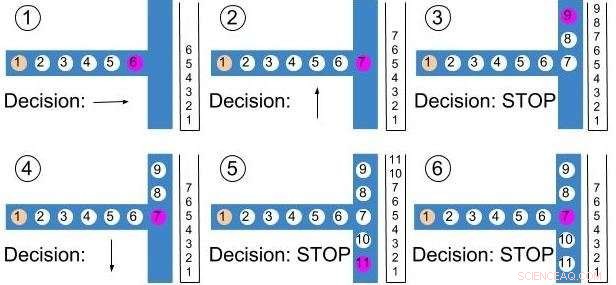
Om een wegenkaart te maken, het systeem begint op een bekende locatie en gebruikt een neuraal netwerk om de omgeving te onderzoeken om te bepalen welk punt waarschijnlijk het volgende deel van de weg is. Het voegt dan dat punt toe en herhaalt het proces om de weg stap voor stap geleidelijk te volgen. Krediet:Massachusetts Institute of Technology
"Het is belangrijk dat een kaartsysteem goed kan presteren in steden waar het nog niet in getraind is. omdat de regio's waar automatisch in kaart brengen de meeste belofte inhoudt, die zijn waar bestaande kaarten niet bestaan of onnauwkeurig zijn, ' zegt Balakrishnan.
Bastani zegt dat het feit dat RoadTracer een foutpercentage had dat 45 procent lager is, essentieel is om automatische kaartsystemen praktischer te maken voor bedrijven als Google.
"Als het foutenpercentage te hoog is, dan is het efficiënter om de wegen handmatig vanaf het begin in kaart te brengen in plaats van onjuiste segmenten van de afgeleide kaart te verwijderen, ' zegt Bastani.
Nog altijd, het implementeren van iets als RoadTracer zou mensen niet volledig uit de lus halen:het team zegt dat ze zich kunnen voorstellen dat het systeem wegenkaarten voor een grote regio voorstelt en vervolgens een menselijke expert laat komen om het ontwerp nogmaals te controleren.
"Dat gezegd hebbende, wat duidelijk is, is dat je met een systeem als het onze de hoeveelheid vervelend werk dat mensen zouden moeten doen drastisch zou kunnen verminderen, ' zegt Alizade.
Inderdaad, een voordeel van de incrementele benadering van RoadTracer is dat het veel gemakkelijker is om fouten te corrigeren; menselijke supervisors kunnen ze eenvoudig corrigeren en het algoritme opnieuw uitvoeren vanaf het punt waar ze waren gebleven, in plaats van onnauwkeurige informatie te blijven gebruiken die doorsijpelt naar andere delen van de kaart.
Natuurlijk, luchtfoto's zijn slechts een stukje van de puzzel. Ze geven je geen informatie over wegen met viaducten en onderdoorgangen, want die zijn van bovenaf onmogelijk vast te stellen. Als resultaat, het team ontwikkelt ook afzonderlijk algoritmen die kaarten kunnen maken van GPS-gegevens, en werken om deze benaderingen samen te voegen tot een enkel systeem voor het in kaart brengen.
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Hoe kunnen onderzoekers snel toegang krijgen tot complexe moleculen voor het ontdekken van geneesmiddelen?
Hoe kunnen onderzoekers snel toegang krijgen tot complexe moleculen voor het ontdekken van geneesmiddelen?- Zou de aarde van gisteren aanwijzingen kunnen bevatten voor het maken van de medicijnen van morgen?
- Wat is een monatomisch ion?
- Onderzoekers ontdekken een manier om de kleur van OLED's te controleren
- Eiwitstructuur zou nieuwe behandelingen voor cystische fibrose kunnen ontsluiten
Hoofdlijnen
- Grazende paarden op betere weiden
- Voors en tegens van Forensic Science
- Wat is een adaptief voordeel voor het beperken van DNA in een kern?
- Relatie tussen DNA-basen Genen, eiwitten en eigenschappen
- Hoge opbrengst, eiwit met sojabonengen
- Maïsgenetica geeft inzicht in de gewassen die historisch zijn verspreid over Amerika
- Wat zijn de kenmerken die alle bacteriën gemeen hebben?
- Hoeveelheid water in stamcellen kan zijn lot bepalen als vet of bot
- Dode bomen leven met schimmels
- Deutsche Telekom boekt recordwinst dankzij US

- De financieringsambities van Amazon zouden de aandacht van Fed . trekken

- India geeft Volkswagen 24 uur om Dieselgate-boete te betalen

- Phishing-succes gekoppeld aan incentives en vasthouden aan een effectieve strategie

- Een nieuwe methode om robuuste voortbeweging in een viervoetige robot mogelijk te maken


 Deep-learning AI-systeem zet Singapore op de wereldkaart van big data-analyse
Deep-learning AI-systeem zet Singapore op de wereldkaart van big data-analyse- Onderzoekers ontdekken dat twee verschillende ecologische mechanismen veerkracht kunnen bieden tegen invasieve soorten
- Opwarming van de aarde kan de beschikbaarheid van essentiële hersenvormende vetzuren bedreigen
- Het punt begrijpen:realtime monitoring van atomaire microscoopsondes past zich aan voor slijtage
- Sterrenkunde vanaf 40, 000 voet en 43,5 graden zuid
- Natuurkundigen observeren gewijzigde energielandschappen op de kruising van 2D-materialen
- Vier factoren die van invloed zijn op elektromagneten
- NASA's volgende grote telescoop om het grote geheel van het universum te zien
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
