Wetenschap
Chemische ingenieurs repliceren voer, vecht- en vluchtreacties in katalytische chemische reacties
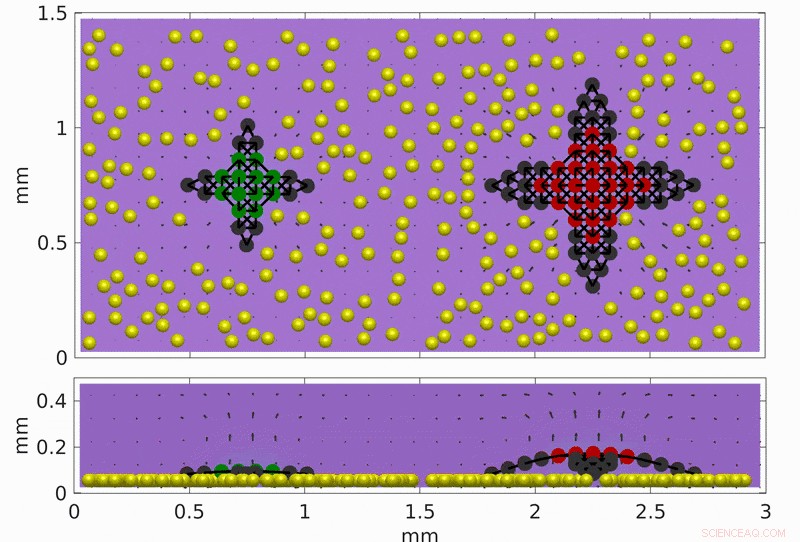
Het oppervlak van actieve plaatsen op de rode krab is twee keer zo groot als die van de groene grijper; daarom, de rode krab trekt deeltjes weg van groene concurrenten door sterkere binnenwaartse stromen te genereren (gemarkeerd met zwarte pijlen). Krediet:Abhrajit Laskar/Anna Balazs
Samenwerking en competitie zijn fundamentele instincten van biologische soorten, van de eenvoudigste eencellige organismen tot reptielen, vissen en primaten, evenals mensen. Dit dynamische gedrag - het resultaat van miljoenen jaren evolutie - is moeilijk te repliceren in synthetische systemen. Echter, chemische ingenieurs van de University of Pittsburgh Swanson School of Engineering hebben deze reacties nagebootst in een omgeving van microscopisch kleine deeltjes, lakens, en katalysatoren, effectief nabootsen van reacties van voeding, vechten, en vluchten.
Hun onderzoek, "Samenwerking en voltooiing tussen actieve platen voor zelfrijdende deeltjes, " werd deze week gepubliceerd in Proceedings van de National Academy of Sciences . Hoofdonderzoeker is Anna C. Balazs, de John A. Swanson Chair en Distinguished Professor of Chemical and Petroleum Engineering aan de Swanson School. Hoofdauteur is Abhrajit Laskar, en co-auteur is Oleg E. Shklyaev, beide postdoctorale medewerkers.
Als aanloop naar dit werk Dr. Balazs et al. gebruikten computationele modellering om chemisch actieve vellen te ontwerpen die in staat waren om te wikkelen, flap en kruipen in een met vloeistof gevulde microkamer, gebruikmakend van het potentieel om flexibele of "squishy" robots te maken voor fluïde omgevingen. Voor het PNAS-artikel, de onderzoekers ontwierpen fluïdische systemen die de met katalysator beklede vellen vormgeven in een vorm die lijkt op een krab met vier "klauwen, " het creëren van het roofdier dat chemisch op zijn deeltjesprooi kan "jagen".
"Terwijl we toekomstige robotica en slimme apparaten ontwikkelen, het is belangrijk om de grenzen te begrijpen aan het imiteren van biologische functies in door mensen gemaakte machines. Het is ook van cruciaal belang om te begrijpen of kunstmatige systemen kunnen samenwerken of strijden om hulpbronnen, " Dr. Balazs legde uit. "Als we deze onderlinge afhankelijkheid kunnen repliceren, we kunnen helpen de basis te leggen voor robots of andere apparaten om samen te werken aan een gemeenschappelijk doel."
Om dit gedrag te beïnvloeden, Balazs en haar medewerkers gebruikten de katalysator op de platen om reactanten in een microkamer om te zetten in producten. Deze reactie zorgt voor variaties in de chemische samenstelling en vloeistofdichtheid, die de tweedimensionale platen veranderen in 3-D "krabben" en zowel de krabben als de deeltjes in de vloeistof voortstuwen. Omdat de krabben chemische gradiënten genereren in één gebied, de deeltjes reageren door te proberen uit dit gebied te "vluchten", vormen een sterk onderling afhankelijk systeem.
Deze onderlinge afhankelijkheid had ook invloed op de omgeving toen een tweede krab aan de vloeistof werd toegevoegd - zodra de reactant was geïntroduceerd, de twee krabben bootsten samenwerking na om deeltjes te "delen". Echter, als een grotere krab werd geïntroduceerd, het zou concurreren met de kleinere vormen om alle deeltjes voor zichzelf te vangen.
"In sommige gevallen, de grote krab kan de kleine deeltjes niet vangen, maar als we meer krabben toevoegen, lijken ze samen te werken als een roedel wolven, " Dr. Shklyaev legt uit. "Evenzo, wanneer een nog groter roofdier de microkamer binnenkomt, de "honger" die het genereert met een groter katalytisch oppervlak zal het gedrag van de kleinere roofdierbladen domineren."
Dr. Laskar zegt dat de eenvoud van dit systeem is dat de enige programmering die erbij komt kijken de introductie van het chemische reagens in het systeem is.
"Toen we eenmaal een reactant aan de microkamer hadden toegevoegd, al het biomimetische gedrag gebeurde spontaan, " zei hij. "We kunnen dan de mate aanpassen waarin de deeltjes reageren op chemische gradiënten, omdat verschillende deeltjes op verschillende manieren zullen reageren. Dus het veranderen van de eigenschap van zelfs maar één type object verandert de onderlinge afhankelijkheid van het hele systeem."
Volgens Dr. Balazs, de nieuwe bevindingen wijzen op het vermogen om de activiteit in de microkamer in ruimte en tijd te beheersen, waardoor de vellen alleen op verschillende commando's kunnen reageren door de aan de oplossing toegevoegde reactanten te veranderen.
"Onze berekeningen onthullen het vermogen om microscopische objecten te sturen om specifieke functies uit te voeren, zoals het transporteren van cellen of het bouwen van complexe structuren, "zei ze. "Deze ontwerpregels hebben het potentieel om de functionaliteit van microfluïdische apparaten te diversifiëren, waardoor ze aanzienlijk complexere taken kunnen uitvoeren."
 Doorbraak voor wetshandhavers om hennep en gecontroleerde marihuana snel te onderscheiden
Doorbraak voor wetshandhavers om hennep en gecontroleerde marihuana snel te onderscheiden- Op weg naar autonome materialen, onderzoekers ontwerpen patronen in zelfrijdende vloeibare kristallen
- High-speed atomic force microscopie visualiseert celeiwitfabrieken
- Hoe de optimale temperatuur voor een enzym te meten
- Eiwitraket verhoogt kans op doorbraken van ziekten
- Enquête beschrijft de impact van de droogte van 2016 op de landbouw in New York
- Studie spoort onderzoekers van global change aan om variabiliteit te omarmen
- Landbouwmest verhoogt de uitstoot van broeikasgassen, zelfs in de winter
- Suomi NPP satellietvolgsysteem tropische cycloon Cebile
- Ongelijkheid bevordert ontbossing in Latijns-Amerika
Hoofdlijnen
- Onderzoek creëert een manier om varkens te beschermen tegen PRRS tijdens de voortplanting
- Basiscelfuncties
- Geneesmiddelresistentie uit schimmels verdrijven
- De chemische samenstelling van voedingsstoffen Agar
- De nadelen van biotechnologie
- Wetenschappers maken apparaat voor ultranauwkeurige genoomsequencing van afzonderlijke menselijke cellen
- Hoe werkt ADP naar ATP?
- Vogels onthullen het belang van goede buren voor gezondheid en veroudering
- Wat is het doel van de fibreuze capsule?
- Niet-destructieve karakteriseringstechniek helpt bij de ontwikkeling van galliumnitridekristallen
- Waarom een knapperige korst essentieel is voor het aroma en de smaak van baguettes
- Nieuwe chemische reactie kan uiteindelijk nieuwe brandstoffen en medicijnen opleveren

- Cellulose-acetaat maken

- Ingenieurs vinden dat flessenborstelcopolymeren kunnen worden aangepast voor toepassingen


 Methodologie voor de beoordeling van de geloofwaardigheid van historische wereldwijde LUCC-datasets
Methodologie voor de beoordeling van de geloofwaardigheid van historische wereldwijde LUCC-datasets- Natuurkundigen gebruiken elektrische velden om oscillaties in kleine deeltjes te veroorzaken
- Studie neemt bezorgdheid over radioactiviteit in migrerende zeevruchten weg
- Copernicus Sentinel-1 brengt overstromingen in kaart na Idai
- Virgin Galactic krijgt FAA's OK om klanten naar de ruimte te lanceren
- Onderzoekers onderzoeken droogtetolerante wijnstokken
- Gouden nanodeeltjes en theeverbinding behandelen prostaatkanker met minder bijwerkingen dan chemotherapie
- NASA kiest SpaceX om mensen terug naar de maan te brengen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
