Wetenschap
Software vindt de beste manier om een Mars-landing vast te houden
Een zelfportret van NASA's Marsrover Curiosity. Krediet:NASA/JPL-Caltech/MSSS
Het selecteren van een landingsplaats voor een rover die naar Mars gaat, is een langdurig proces waarbij normaal gesproken grote commissies van wetenschappers en ingenieurs betrokken zijn. Deze commissies besteden doorgaans meerdere jaren aan het afwegen van de wetenschappelijke doelstellingen van een missie tegen de technische beperkingen van een voertuig, om sites te identificeren die zowel wetenschappelijk interessant als veilig zijn om op te landen.
Bijvoorbeeld, het wetenschappelijke team van een missie wil misschien bepaalde geologische vindplaatsen verkennen op tekenen van water, leven, en bewoonbaarheid. Maar ingenieurs kunnen ontdekken dat die terreinen te steil zijn voor een voertuig om veilig te landen, of de locaties ontvangen mogelijk niet genoeg zonlicht om de zonnepanelen van het voertuig van stroom te voorzien als het eenmaal is geland. Het vinden van een geschikte landingsplaats omvat daarom het samenvoegen van informatie die in de loop der jaren is verzameld door eerdere Mars-missies. Deze data, hoewel groeien met elke missie, zijn fragmentarisch en onvolledig.
Nu hebben onderzoekers van MIT een softwaretool ontwikkeld voor computerondersteunde ontdekkingen die missieplanners kunnen helpen bij het nemen van deze beslissingen. Het produceert automatisch kaarten van gunstige landingsplaatsen, gebruikmakend van de beschikbare gegevens over de geologie en het terrein van Mars, evenals een lijst met wetenschappelijke prioriteiten en technische beperkingen die een gebruiker kan specificeren.
Als voorbeeld, een gebruiker kan bepalen dat een rover moet landen op een locatie waar hij bepaalde geologische doelen kan verkennen, zoals open bassins. Tegelijkertijd, de landingsplaats mag een bepaalde helling niet overschrijden, anders zou het voertuig omvallen tijdens een poging om te landen. Het programma genereert vervolgens een "gunstigheidskaart" van landingsplaatsen die aan beide beperkingen voldoen. Deze locaties kunnen verschuiven en veranderen als een gebruiker aanvullende specificaties toevoegt.
Het programma kan ook mogelijke paden uitstippelen die een rover kan nemen van een bepaalde landingsplaats naar bepaalde geologische kenmerken. Bijvoorbeeld, als een gebruiker specificeert dat een rover blootstelling aan sedimentair gesteente moet onderzoeken, het programma produceert paden naar dergelijke nabijgelegen structuren en berekent de tijd die het zou kosten om ze te bereiken.
Victor Pankratius, hoofdonderzoeker in het Kavli Institute for Astrophysics and Space Research van MIT, zegt dat missieplanners het programma kunnen gebruiken om snel en efficiënt verschillende landings- en verkenningsscenario's te overwegen.
"Dit zal nooit de eigenlijke commissie vervangen, maar het kan dingen veel efficiënter maken, omdat je met verschillende scenario's kunt spelen terwijl je praat, ' zegt Pankratius.
De studie van het team werd op 31 augustus online gepubliceerd door Aard- en ruimtewetenschap en maakt deel uit van het online nummer van 8 september van het tijdschrift.
Nieuwe sites
Pankratius en postdoc Guillaume Rongier, in het MIT's Department of Earth, Atmosferische en Planetaire Wetenschappen, creëerde het programma om gunstige landingsplaatsen te identificeren voor een conceptuele missie vergelijkbaar met NASA's Mars 2020-rover, die is ontworpen om horizontaal te landen, ook al, stofvrije gebieden en heeft tot doel een oud, mogelijk bewoonbaar, site met magmatische ontsluitingen.
Ze ontdekten dat het programma veel landingsplaatsen voor de rover identificeerde die in het verleden zijn overwogen, en het benadrukte andere veelbelovende landingsplaatsen die zelden werden voorgesteld. "We zien dat er sites zijn die we kunnen verkennen met bestaande rover-technologieën, die commissies voor landingsplaatsen misschien willen heroverwegen, ' zegt Pankratius.
Het programma kan ook worden gebruikt om de technische vereisten voor toekomstige generaties Marsrovers te onderzoeken. "Ervan uitgaande dat je op steilere bochten kunt landen, of sneller rijden, dan kunnen we afleiden welke nieuwe regio's je kunt verkennen, ' zegt Pankratius.
Een vage landing
De software vertrouwt gedeeltelijk op "fuzzy logic, " een wiskundig logisch schema dat dingen groepeert die niet op een binaire manier zijn zoals Booleaanse logica, zoals ja/nee, waar onwaar, of veilig/onveilig, maar in een meer vloeiende, op waarschijnlijkheid gebaseerde mode.
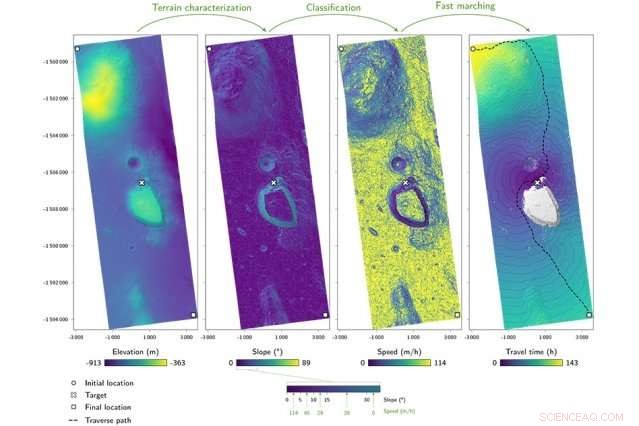
De afbeelding toont de opeenvolgende stappen om een rover na te bootsen die rond Mars rijdt. MIT-onderzoekers ontwikkelden een methode om eerst het terrein boven het interessegebied te karakteriseren. Op basis van die karakterisering en de kenmerken van de rover, ze gebruiken een "snel marcherend" algoritme om de snelheid van de rover te schatten, die ze gebruiken om de tijd te berekenen die nodig is om ergens in dat gebied te rijden. Ze kunnen ook het kortste pad inschatten vanaf een initiële locatie, naar een doel, naar een definitieve locatie. Credit:NASA/JPL/Universiteit van Arizona, Guillaume Rongier
"Traditioneel komt dit idee uit de wiskunde, waar in plaats van te zeggen dat een element bij een verzameling hoort, Ja of nee, fuzzy logic zegt dat het hoort bij een bepaalde waarschijnlijkheid, "dus onvolledige of onnauwkeurige informatie weergeeft, Pankratius legt het uit.
In het kader van het vinden van een geschikte landingsplaats, het programma berekent de kans dat een rover een bepaalde helling kan beklimmen, waarbij de kans kleiner wordt naarmate de locatie steiler wordt.
"Met vage logica kunnen we deze waarschijnlijkheid ruimtelijk uitdrukken - hoe erg is het als ik zo steil ben, tegen deze steile, " zegt Pankratius. "Het is een manier om met onnauwkeurigheid om te gaan, op een manier."
Met behulp van algoritmen gerelateerd aan fuzzy logic, het team creëert rauwe, of initiaal, gunstige kaarten van mogelijke landingsplaatsen over de hele planeet. Deze kaarten zijn gerasterd in afzonderlijke cellen, elk vertegenwoordigen ongeveer 3 vierkante kilometer op het oppervlak van Mars. Het programma berekent, voor elke cel, de kans dat het een gunstige landingsplaats is, en genereert een kaart die in kleur is ingedeeld om kansen tussen 0 en 1 weer te geven. Donkere cellen vertegenwoordigen locaties met een kans van bijna nul om een gunstige landingsplaats te zijn, terwijl lichtere locaties een grotere kans hebben op een veilige landing met interessante wetenschappelijke vooruitzichten.
Zodra ze een onbewerkte kaart van mogelijke landingsplaatsen hebben gegenereerd, de onderzoekers houden rekening met verschillende onzekerheden in de landingsplaats, zoals koerswijzigingen en mogelijke navigatiefouten tijdens de afdaling. Gezien deze onzekerheden, het programma genereert vervolgens landingsellipsen, of circulaire doelen waar een rover waarschijnlijk zal landen om de veiligheid en wetenschappelijke verkenning te maximaliseren.
Het programma gebruikt ook een algoritme dat bekend staat als snel marcheren om paden in kaart te brengen die een rover over een bepaald terrein kan nemen zodra het is geland. Snel marcheren wordt meestal gebruikt om de voortplanting van een front te berekenen, zoals hoe snel een windfront een kust bereikt als het met een bepaalde snelheid reist. Voor de eerste keer, Pankratius en Rongier pasten snel marcheren toe om de reistijd van een rover te berekenen terwijl deze reist van een startpunt naar een geologische structuur van belang.
"Als je ergens op Mars bent en je krijgt deze bewerkte kaart, je kunt vragen, 'Vanaf hier, hoe snel kan ik naar een willekeurig punt in mijn omgeving gaan? En dit algoritme zal je vertellen, ' zegt Pankratius.
Het algoritme kan ook routes uitstippelen om bepaalde obstakels te vermijden die de reis van een rover kunnen vertragen, en breng kansen in kaart om bepaalde soorten geologische structuren in een landingsgebied te raken.
"Het is moeilijker voor een rover om door stof te rijden, dus het gaat in een langzamer tempo, en stof is niet noodzakelijk overal, gewoon in stukjes, " zegt Rongier. "Het algoritme houdt rekening met dergelijke obstakels bij het in kaart brengen van de snelste traverse paden."
De teams zeggen dat operators van huidige rovers op het oppervlak van Mars het softwareprogramma kunnen gebruiken om de voertuigen efficiënter naar plaatsen van wetenschappelijk belang te leiden. In de toekomst, Pankratius stelt zich voor dat deze techniek of iets dergelijks wordt geïntegreerd in steeds autonomer wordende rovers die niet vereisen dat mensen de voertuigen de hele tijd vanaf de aarde bedienen.
"Op een dag, als we volledig autonome rovers hebben, ze kunnen met al deze dingen rekening houden om te weten waar ze heen kunnen, en zich kunnen aanpassen aan onvoorziene situaties, "zegt Pankratius. "Je wilt autonomie, anders kan het lang duren om heen en weer te communiceren als je snel kritische beslissingen moet nemen."
Het team onderzoekt ook toepassingen van de technieken in de verkenning van geothermische vindplaatsen op aarde, in samenwerking met het MIT Earth Resources Lab van het Department of Earth, Atmosferische en planetaire wetenschappen.
"Het is een soortgelijk probleem, " zegt Pankratius. "In plaats van te zeggen 'Is dit een goede site, Ja of nee?' u kunt zeggen, 'Laat me een kaart zien van alle gebieden die waarschijnlijk geschikt zijn voor geothermische exploratie.'"
Naarmate de gegevens verbeteren, zowel voor Mars als voor geothermische structuren op aarde, hij zegt dat die gegevens in het bestaande programma kunnen worden ingevoerd om nauwkeurigere analyses te maken.
"Het programma is stapsgewijs uitbreidbaar, " hij zegt.
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Een geoptimaliseerde structuur van memristive-apparaat voor neuromorfe computersystemen
Een geoptimaliseerde structuur van memristive-apparaat voor neuromorfe computersystemen- Wetenschappers ontdekken werkingsmechanisme voor veelbelovende kankerverbinding
- Moleculaire machine maakt gebruik van beweging in één richting
- De beste materialen voor zeeweringen
- Surrey ontwikkelt nieuwe superkatalysator om koolstofdioxide en methaan te recyclen
- Het optimaliseren van de voeding is noodzakelijk om de melkproductie in biologische kuddes op peil te houden
- Schone borden komen veel vaker voor als we thuis eten
- Waar landelijke en stedelijke Amerikanen verdeeld zijn over het milieu - en waar er een gemeenschappelijke basis is?
- Hoe ecotoerisme inheemse gemeenschappen kan schaden
- Lava van de uitbarsting van La Palma bereikt eindelijk de Atlantische Oceaan
Hoofdlijnen
- Welke soorten genen hebben plasmiden?
- Hoe converteert ADP naar ATP?
- De voor- en nadelen van mutatie
- Wat is een voorbeeld van een recessief fenotype?
- Wetenschappers vinden bloedmolecuul dat wolven aantrekt stoot mensen af
- De virale parasieten van gigantische virussen in de loop van de tijd volgen
- 5 geheimen om erachter te komen Whatll zijn op het examen
- Amerikaanse biologische klok-genetici winnen Nobelprijs voor Geneeskunde 2017
- Gescheiden sinds de dinosauriërs, bamboe-etende lemuren, panda's delen gemeenschappelijke darmmicroben



 's Werelds eerste demonstrator voor opslag van groene energie
's Werelds eerste demonstrator voor opslag van groene energie- Ingenieurs maken optische pincetten op micronschaal
- Californiërs bashen Trump voor poging om klimaatveranderingsplan te beëindigen
- Waarom ik mijn baan opzegde om geluk te onderzoeken en begon te fietsen naar Bhutan
- Test van Marsgebonden instrumenten in het Zwarte Woud
- Satellieten volgen verdwijnend Antarctisch ijs
- EU waarschuwt vijandige landen zijn 5G-risico, vermijdt het noemen van namen
- De Green New Deal verandert al de voorwaarden van het debat over klimaatactie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
