Wetenschap
Een bio-geïnspireerde flow-sensing cupula voor onderwaterrobotica
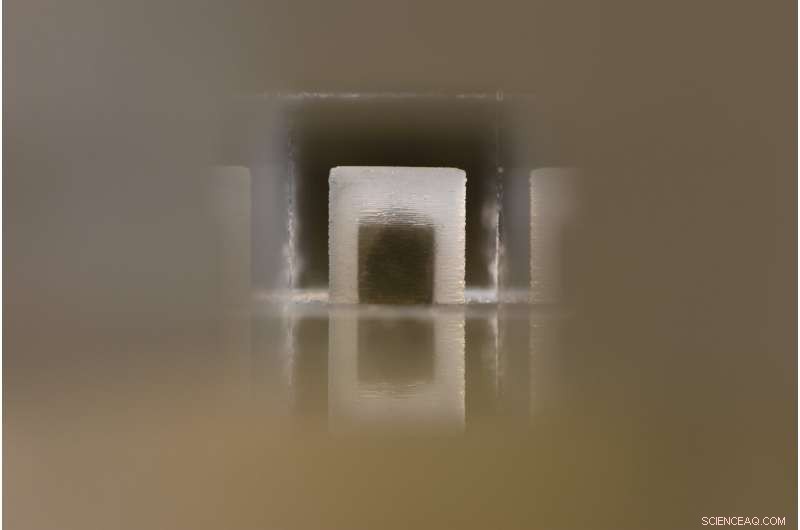
De cupula (lichtgebied) in het acrylkanaal dat wordt gebruikt voor experimenteel testen. Binnen in de cupula bevinden zich vloeibare metalen gallium-indiumplaten (donker gebied). Krediet:U.S. Naval Research Laboratory.
De natuur kan een kostbare inspiratiebron zijn voor onderzoekers die robots en kunstmatige intelligentie (AI)-systemen ontwikkelen. Studies in onderwaterrobotica, bijvoorbeeld, hebben vaak geprobeerd om mechanismen die in het waterleven zijn waargenomen, te repliceren of op te nemen, zoals visbewegingspatronen en haaienhuidtexturen.
Een team van onderzoekers van het U.S. Naval Research Laboratory en het U.S. Naval Undersea Warfare Center heeft onlangs een capacitieve flow-sensing cupula ontwikkeld, geïnspireerd op oppervlakkige neuromasten, die in wezen structuren op het lichaam van vissen en amfibieën zijn die de stroming van water kunnen detecteren. Deze cupula, gepresenteerd in een paper gepubliceerd in MDPI, vertoont een hoge gevoeligheid van 0,05 picofarad per millimeter (pF/mm) en kan worden toegepast op een verscheidenheid aan robots en voertuigen die zijn ontworpen om onder water te worden ingezet.
"Het U.S. Naval Research Laboratory, samen met vele andere instellingen, onderzoekt op de natuur geïnspireerde middelen om meer efficiëntie en wendbaarheid in onderwaterrobots te bereiken, "Charles Rohde, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "In essentie, het creëren van een kunstmatige vis biedt veel voordelen ten opzichte van traditionele propeller-aangedreven ontwerpen. Als we kijken naar biologische tegenhangers, Hoewel, we zien dat hun succes te danken is aan meer dan alleen de mechanica en lichaamsbeweging; vissen hebben arrays van sensoren langs hun lichaam."
Vissen hebben een reeks zogenaamde laterale lijnsensoren die feedback geven over de stromingsconditie, waardoor ze zich onder water kunnen oriënteren en objecten in de buurt kunnen detecteren. Rohde en zijn collega's wilden deze sensoren repliceren en hun eigenschappen nabootsen om de prestaties van onderwatervoertuigen te verbeteren.
De biologische cupula's die bij vissen worden waargenomen, bestaan uit gel ingebed met sensorharen, die via een reeks zenuwen aan de hersenen van het waterdier zijn bevestigd. De door de onderzoekers ontwikkelde kunstmatige cupula, anderzijds, is gemaakt van siliconenrubber ingebed met vloeibare metalen detectieplaten, die met draden aan een microcontroller zijn bevestigd.
Een ander verschil tussen natuurlijk voorkomende cupula's en de kunstmatige die door de onderzoekers is ontwikkeld, is dat terwijl de eerste elektrochemische signalen gebruikt, de laatste is capacitief (d.w.z. zoals touchscreens voor smartphones, het is afhankelijk van veranderingen in elektrische velden). In tegenstelling tot touchscreens, het bio-geïnspireerde apparaat heeft geen interactie met externe objecten (bijvoorbeeld menselijke vingers). In plaats daarvan, het bestaat uit vloeibare metalen platen die ten opzichte van elkaar bewegen en vervormen.
"De platen van vloeibaar metaal (gallium-indium) vormen twee capacitieve sensoren die vervormen op basis van krachten die door vloeistofstroom op de siliconen cupula worden uitgeoefend, "James Wisman, andere onderzoekers die bij het onderzoek betrokken waren, uitgelegd. "Als de cupula vervormt, de vloeibare metalen platen binnenin bewegen dichter of verder van elkaar, het veranderen van de capaciteit tussen hen. Een microcontroller registreert deze verandering in capaciteit, die kan worden gerelateerd aan de externe vloeistofstroomsnelheid door middel van experimenten en wiskundige modellering."
De door de onderzoekers ontwikkelde capacitieve sensoren hebben een hoge gevoeligheid en kunnen ook in arrays worden gerangschikt. Bijvoorbeeld, tientallen van deze sensoren kunnen in een zijlijn over een onderwaterrobot worden geplaatst, om de kenmerken van de waterstroom vast te leggen en te volgen. Deze voelende cupula's zijn zacht; dus kunnen ze worden geïntegreerd met kunstmatige huidmaterialen zonder stijfheid toe te voegen aan bio-geïnspireerde machines.

Cupula-monster dat zijn flexibiliteit toont. Krediet:U.S. Naval Research Laboratory.
"Er zijn verschillende andere cupula- en haargebaseerde flowsensoren gepubliceerd in de literatuur, maar we waren verrast om slechts één andere onderwater te vinden, op zeehonden geïnspireerd exemplaar dat capacitief van aard was, " zei Rohde. "Onze resultaten laten zien dat capacitieve detectie een veelbelovende benadering is, en we hopen dat onze publicatie anderen zal aanmoedigen om deze methode te verkennen."
Rohde, Wissman en hun collega's vervaardigden hun bio-geïnspireerde sensor met behulp van verloren was- en vacuüminjectietechnieken. Vervolgens voerden ze een reeks voorbereidende tests uit om de prestaties te evalueren.
In vergelijking met andere capacitieve apparaten, hun sensor bevat transducers in de cupula zelf, in plaats van aan de basis. In hun evaluaties dit specifieke aspect van de fabricage van de sensor bleek zeer effectief te zijn, wat leidt tot meer geavanceerde detectiemogelijkheden dan die waargenomen in eerder ontwikkelde capacitieve apparaten.
"Afgezien van de sensor zelf, een ander belangrijk aspect is het fabricageproces, Wissman zei. "Om zo'n complexe structuur in een kleine siliconenstructuur te creëren, we gebruikten een unieke combinatie van opoffering (denk aan verloren wasgieten) en vacuüminjectie van vloeibaar metaal. Dit kan eenvoudig worden uitgebreid naar andere apparaten, zoals complexe 3D-bedrading of antennes."
Het door Rohde ontwikkelde sensorapparaat, Wissman en zijn collega's zouden een breed scala aan toepassingen kunnen hebben op het gebied van onderwaterrobotica, omdat het de ontwikkeling mogelijk maakt van robots die effectiever door onderwateromgevingen kunnen navigeren. In hun toekomstige werk, de onderzoekers zijn van plan hun apparaat te miniaturiseren, die momenteel 5 mm hoog is; 50 keer groter dan de neuromasten waargenomen bij vissen.
Een kleinere versie van de sensor zou een directere meting van grenslaagstromingscondities mogelijk maken, nog dichter bij het wateroppervlak van een robot. Om de sensor te miniaturiseren, echter, de onderzoekers zullen hun fabricagemethoden moeten veranderen.
Tot dusver, Wissman en zijn collega's hebben zich voornamelijk gericht op gestage (of langzaam veranderende) waterstromen, maar supersnelle stroomvariaties (d.w.z.> 1, 000-10, 000 keer per seconde) geassocieerd met turbulentie en wervelingen, zou een dieper inzicht kunnen geven in de omgeving van een robot. In hun aanstaande studies, de onderzoekers willen daarom de reikwijdte van hun werk verbreden door deze stroomvariaties op te nemen en te kijken naar snellere data-acquisitietechnieken.
"We zijn ook van plan een reeks kunstmatige cupula's te assembleren - een kunstmatige zijlijn - die kunnen worden bevestigd aan een onderwaterrobot, Wissman zei. "Het hoogtepunt van dit project zou zijn om naar een autonome robotvis te kijken, met behulp van onze ingebouwde sensoren, succesvol navigeren door een zwembad met obstakels en stromingen."
© 2019 Wetenschap X Netwerk
 Experimenten op afstand tonen de waarde van wereldwijde verbindingen tijdens de pandemie
Experimenten op afstand tonen de waarde van wereldwijde verbindingen tijdens de pandemie- Beter begrip van waterstofperoxideregulatie kan leiden tot nieuwe inzichten in ziekteontwikkeling
- Wat zijn sommige items gemaakt van koolstof?
- Onderzoekers ontwikkelen baanbrekende röntgentechniek om oude artefacten te analyseren
- Een nieuw materiaal voor de batterij van de toekomst
- Informatie over de Georgia Giant Bobwhite Quail
- Welke effecten hebben chloorfluorkoolstoffen op mensen?
- Historische klimaatschommelingen in Centraal-Europa overschat door analyse van jaarringen
- Laaggelegen bossen die het moeilijker vinden om aan te groeien na branden als gevolg van klimaatverandering
- Studie onthult hoeveelheid vroegtijdige sterfgevallen in verband met internationale handel
Hoofdlijnen
- Wat zijn de vier belangrijkste methoden voor het produceren van ATP?
- In bijensterfte, fungiciden komen naar voren als onwaarschijnlijke schurk
- Wat is interfase, metafase en anafase?
- Een ellebooggewricht bouwen Model
- Micro-evolutie: definitie, proces, micro versus macro & voorbeelden
- Gene drive-technologieën voor het behoud van ecosystemen:gebruik met zorg
- Wat is opsomming in de microbiologie?
- Weefsels regenereren met moleculen die gericht zijn op genen
- Wat kan er gebeuren als Meiose verkeerd gaat?
- Miljardair Bezos koopt landgoed voor $ 165 miljoen:rapport

- Havenbedrijf DP World nu stevig in hyperloop business

- Draagbare apparaten voor huisdieren brengen de menselijke privacy in gevaar

- Onderzoek roept oproepen op tot strengere handhaving van socialemediabedrijven

- Optogenetica - neuronen aansturen met licht - kan leiden tot genezing van PTSS, Alzheimer


 Nieuw model beschrijft fasescheiding die antilichaamoplossingen bederft
Nieuw model beschrijft fasescheiding die antilichaamoplossingen bederft- keratine, eiwitten van 54 miljoen jaar oude zeeschildpad vertonen evolutie van overlevingskenmerken
- Welke schade veroorzaken Tsunami's?
- Fox Creek-aardbevingen gekoppeld aan voltooiingsvolume en locatie van hydrofracturering
- Een universum met oligarchen:tijdperk van reïonisatie waarschijnlijk het werk van de meest massieve, lichtgevende sterrenstelsels
- Mechanisme achter XFEL-geïnduceerd smelten van diamant onthuld
- Hoe houden Van der Waals krachten moleculen vast?
- Een halfgeleiderchip detecteert antigeenconcentraties bij 1 delen per quadriljoen molmassa
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | French |

-
Wetenschap © https://nl.scienceaq.com
