Wetenschap
Drijvende magnetische microrobots voor vezelfunctionalisatie
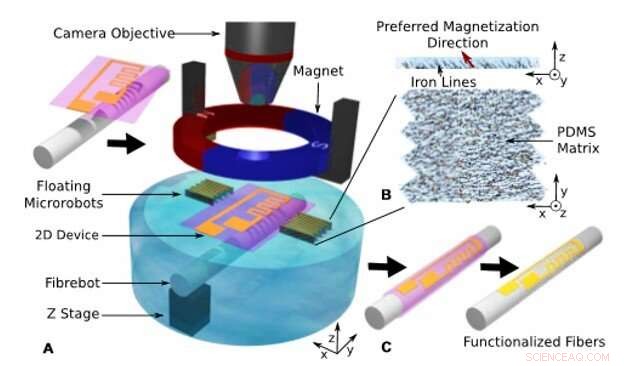
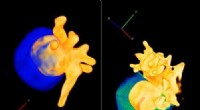
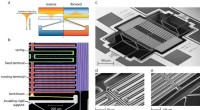
Opstelling van de door microrobots geassisteerde, zeer nauwkeurige natte overdracht. (A) Magnetisch bestuurde microrobots via een externe magneet om een zwevend 2D-apparaat op een doelsubstraat uit te lijnen (bijv. optische vezel en 3D-microdevice). (B) Weergave van de microrobotstructuur waarin ijzeren lijnen gevangen in een elastomeermatrix worden gebruikt om een voorkeursmagnetisatierichting op te slaan. (C) Definitief geassembleerde apparaten met het functionele patroon uitgelijnd met een precisie van 5 m en 0,4 °. Krediet:Wetenschap Robotica, doi:10.1126/scirobotics.aax8336
Minimaal invasieve chirurgie wordt steeds vaker gebruikt om kleine laesies aan te pakken en er bestaat een groeiende vraag naar geminiaturiseerde medische hulpmiddelen. Deze omvatten microkatheters, gelede micro-pincet of pincet om te voelen en te bedienen tijdens precisiechirurgie. De nauwkeurige integratie en functionalisering van chemische en fysische sensoren blijft nog steeds een grote uitdaging. In een nieuwe studie over Wetenschap Robotica , Antoine Barbot en collega's van het Institute of Medical Robotics in China en het Hamlyn Center for Robotic Surgery in Londen ontwikkelden een nieuw microrobotplatform om vezels van 140 tot 830 micrometer (µm) te functionaliseren. Vervolgens lijnden ze de 2 mm x 3 mm en 200 µm dikke microbots uit met zwevende elektronische circuits op een vezel met behulp van een nat overdrachtsproces.
De wetenschappers controleerden de positie en oriëntatie van de microrobots op de lucht-waterinterface met behulp van een permanente magneet. Met behulp van het niet-homogene magnetische veld van de magneet regelden ze de precieze afstand tussen de twee microrobots en vergemakkelijkten ze manoeuvres van "grijpen en loslaten" met zwevende elektronische patronen. Barbot et al. een model van dit controleproces voorgesteld, inclusief interacties van de microrobots door oppervlaktespanning voor gedetailleerde prestatievalidatie. Ze demonstreerden een verscheidenheid aan voorbeelduitvoeringen van sensoren op een vezel met een diameter van 200 µm en 3D-apparaten.
De klinische nadruk op verbeterd medisch toezicht en diagnose heeft de toekomst van chirurgie in de richting van precisie-interventie gestuurd. De recente introductie van robotgereedschap op vezels om fiberbots te vormen, heeft onderzoekers in staat gesteld om beeldvorming, detectie en micromanipulatie binnen een enkele vezel. Geavanceerde microgrippers kunnen direct op de punt van een vezel worden geconstrueerd met behulp van twee-fotonpolymerisatie. Onderzoekers kunnen micro-actuatie tot stand brengen met behulp van hydraulische verbindingen die gebruikmaken van de microcapillaire functie om het apparaat te gebruiken voor gerichte medicijnafgifte en gerichte energie zoals laserablatie. Optische vezels zijn een veelzijdig substraat om flexibele microtools te ontwikkelen. Hun oppervlakken bieden een ideale locatie om meerdere sensoren langs de lengte op te nemen.
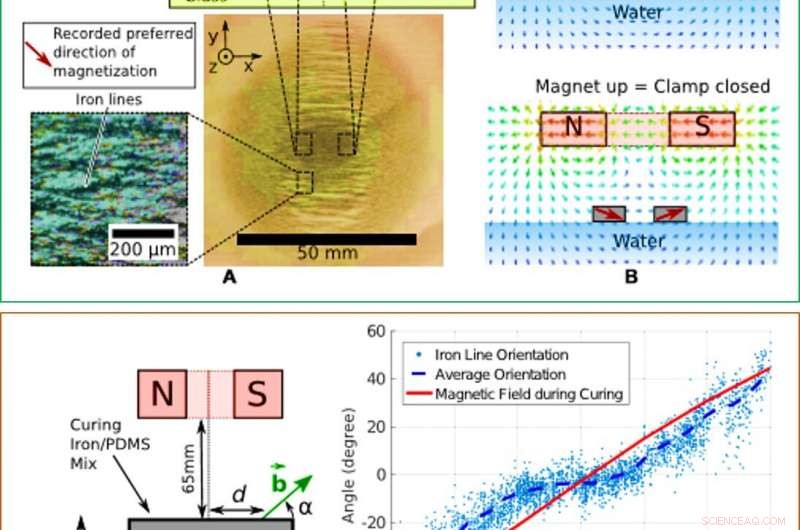
BOVEN:Drijvende microrobots met verschillende voorkeursmagnetisatierichtingen:fabricage- en controleprincipes. (A) Fabricage van microrobots. Met een ringmagneet werden verschillende magnetisatierichtingen in het materiaal geprogrammeerd. (B) klemmechanisme gebruikt in deze studie. Microrobots werden samen of uit elkaar bewogen, afhankelijk van de verticale positie van de magneet, waardoor een effectieve klemming van het patroon kan worden overgedragen, gevolgd door rotatie- en oriëntatiecontrole. BODEM:IJzerlijnoriëntatie binnen de PDMS-matrix. (A) Micro-CT-reconstructie van de mix van polymeer/ijzer. De ijzeren lijnen zijn uitgelijnd met de magnetische veldrichting tijdens het uitharden van het polymeer. (B) IJzeren lijnrichting versus positie. De richting van de ijzeren lijnen volgde de richting van het uithardende magnetische veld. Krediet:Wetenschap Robotica, doi:10.1126/scirobotics.aax8336
Echter, de directe patroonvorming van micro-elektronica op kleine, gebogen objecten die worden gebruikt voor klinische toepassingen is een uitdaging, aangezien bestaande microfabricageprocessen voornamelijk zijn afgestemd op vlakke ondergronden. Onderzoekers hebben tot nu toe twee belangrijke overdrachtsmethoden gebruikt; inclusief dry transfer en de wet transfer techniek. Droge overdracht biedt doorgaans een betere reinheid en hogere precisie in vergelijking met natte overdracht vanwege de afwezigheid van nat etsmiddel en vloeistofverstoring. Natte overdrachtstechnieken die waarschijnlijk bij chirurgische ingrepen optreden, worden beperkt door moeilijkheden bij het nauwkeurig positioneren en scheppen van drijvende apparaten. Dit komt door een gebrek aan precisietools of robotplatforms voor een precieze praktische aanpak. Microrobot-manipulatoren kunnen daarom enkele van de belangrijkste problemen aanpakken waarmee handmatige natte overdrachtsmethoden worden geconfronteerd.
In het huidige werk, Barbot et al. stelde het gebruik van mobiele microrobots voor op de lucht / water-interface om patroonbewegingen tijdens natte overdracht nauwkeurig te regelen. Om een eenvoudige en nauwkeurige bediening te vergemakkelijken, de wetenschappers stelden voor om een paar microrobots te ontwikkelen om zwevende patronen te begrijpen. Ze bereikten dit met behulp van een magnetisch veld dat wordt gegenereerd met een enkele permanente magneet die is gekoppeld om de magnetisatierichting van het samenstellende materiaal van de robot af te stemmen. Barbot et al. gebruikte de interactie tussen de microrobots en het magnetische veld om het microrobotpaar op twee verschillende plaatsen van de lucht/waterinterface te positioneren en een grijper te vormen.
Op microrobots gebaseerde patroongrijpen en -manipulatie. Krediet:Wetenschap Robotica, doi:10.1126/scirobotics.aax8336
De onderzoekers controleerden de afstand tussen de twee microrobots door de afstand tussen het apparaat en de magneet te regelen. Ze construeerden de apparaten met behulp van een elastomeer en polydomethylsiloxaan (PDMS) gemengd met ijzerpoeder. Voor een bepaald experiment, Barbot et al. gemagnetiseerde elke microrobot om op dezelfde manier te reageren op een bepaald magnetisch veld. De wetenschappers gebruikten een 200 µm laag van het PDMS en ijzermengsel onder invloed van een zwak magnetisch veld om ijzerlijnen in de PDMS-matrix te assembleren. Ze hebben het PDMS thermisch uitgehard om de ijzerlijnstructuren op hun plaats te houden en de oriëntatie van het product geëvalueerd met behulp van röntgenmicrotomografie.
De wetenschappers ontwikkelden paren microrobots met aangepaste magnetisatierichtingen met behulp van verschillende delen van de ijzer / PDMS-lagen om rechthoekige robots te vormen van 2 mm bij 3 mm bij een dikte van 200 m. Ze voegden kleine tandachtige structuren toe aan de microrobots om de beweging van het patroon tijdens grijpprocessen te beperken. Het team observeerde de posities van verschillende microrobotparen en hun respectieve reactie op verschillende verticale posities van de magneet om twee bewegingspatronen voor de microrobotparen te verkrijgen, afhankelijk van de hoek (α) tussen hun magnetisatie en het horizontale vlak.
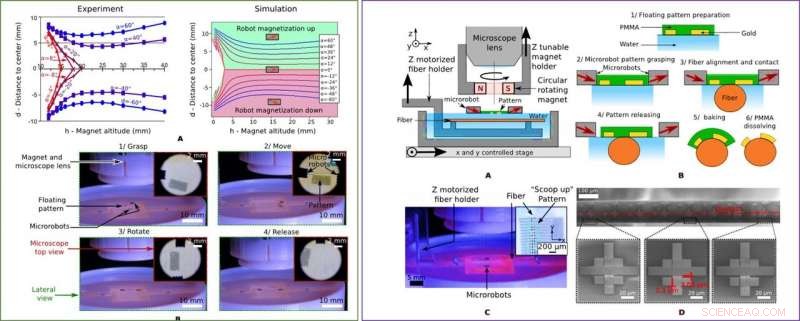
LINKS:Magnetische besturing van het microrobotpaar. (A) Verschillende evenwichtsposities van het microrobotpaar zoals beïnvloed door de verticale positie van de magneet. Links:Experimentele resultaten. Rechts:Simulatieresultaten verkregen met behulp van eindige-elementenmodellering van het magnetische veld. (B) optische afbeeldingen die het microrobotpaar laten zien dat een zwevend patroon manipuleert. RECHTS:Vezelpatronen met behulp van door microrobots geassisteerde natte overdracht. (A) Zijaanzicht van de overdrachtspool met het microrobotpaar met een patroon dat moet worden overgedragen. (B) Fabricage-workflow voor het modelleren van Au-microdevices op de vezel met behulp van de voorgestelde microrobot-geassisteerde natte overdracht. (C) Drijvend patroon (rasterstructuren) overgebracht op een optische vezel met een diameter van 200 m, gezien vanuit de microscoop. (D) Scanning-elektronenmicroscopie (SEM) (Tescan SEM/FIB LYRA3 XM) beelden van twee opeenvolgende overdrachtspositiemarkeringen voor het beoordelen van de haalbare overdrachtsnauwkeurigheid van het voorgestelde systeem. Krediet:Wetenschap Robotica, doi:10.1126/scirobotics.aax8336
Barbot et al. ontwierp de microrobots en liet de hoogte van de magneet toe om de afstand tussen de twee robots te regelen en het openen en sluiten van microrobotgrijpers te regelen. De wetenschappers vergeleken de experimentele resultaten met een simulatie om de interactie tussen de microrobots te begrijpen. Ze observeerden vier vrijheidsgraden (DOF's) om de microrobotparen te besturen. Deze omvatten grijpen (één DOF), positionering (twee DOF's) en oriëntaties (één DOF) tijdens natte overdracht. De wetenschappers manipuleerden het zwevende patroon met behulp van deze vier regelbare ingangen. Ze karakteriseerden de magnetisatie-eigenschap van het ijzer/PDMS-mengsel als een algemene gids voor consistente microrobotontwerpen.
Tijdens de experimenten, het team liet eerst de magneet zakken om de microrobots uit elkaar te bewegen en rond het doelpatroon te positioneren. Vervolgens tilden ze de magneet op om de opening tussen de microrobots te dichten en het patroon vast te pakken voor latere uitlijning met het doelvezelsubstraat. De grijpkracht van de microrobots veroorzaakte geen vervorming van het patroon. Eindelijk, ze lieten de magneet weer zakken voor de grijper om het patroon vrij te geven en het robotpaar weg te bewegen. Met behulp van de opstelling, de onderzoekers voerden natte overdracht uit van het zwevende patroon op een optische vezel. Tijdens de zes stappen, het proces van de microrobotvervaardiging, de wetenschappers brachten willekeurige gouden (Au) patronen zoals elektroden of spanningsmeters op de vezel over. Om de precisie van patroonoverdracht te begrijpen, ze maten de verschuiving tussen twee complementaire patronen die op de vezel waren afgezet. Barbot et al. waargenomen uitdagingen voor langdurige patroonadhesie op gebogen contactlocaties van de vezel.
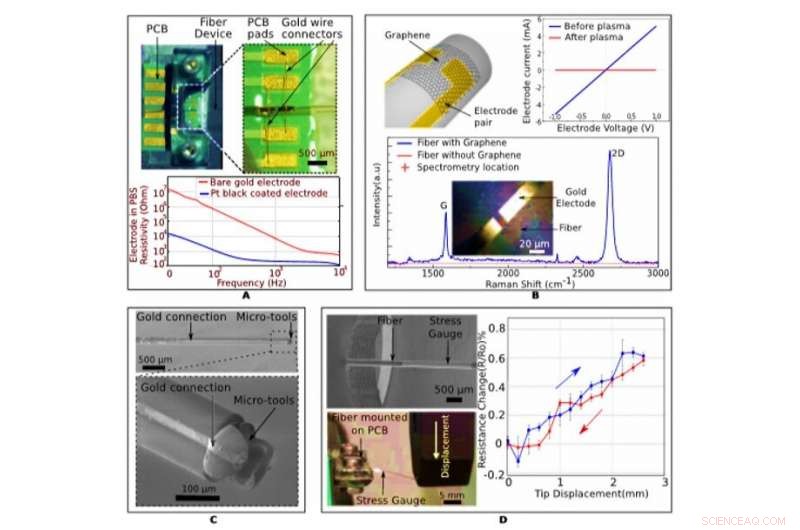
Voorbeeldtoepassingen van door microrobots geassisteerde natte overdracht voor vezelfunctionalisatie. (A) Boven:interface tussen door vezels ondersteunde elektroden en een speciale PCB. Onder:Impedantiekarakterisering van een apparaat met twee elektroden met en zonder elektrodepositie van Pt-zwart. (B) op vezels gebaseerde 2D-grafeenapparaten. Sequentiële natte transfers werden gemaakt om achtereenvolgens het Au-spoor en vervolgens de grafeenfilm te modelleren. De aanwezigheid van grafeen werd beoordeeld met Raman-spectrometrie en een plasmadestructieve test. (C) SEM-foto van een gefunctionaliseerde microtool 3D afgedrukt op de punt van een vezel. Het Au-spoor werd uitgelijnd en met goede overeenstemming overgebracht op de 3D-structuur. (D) Op vezels gebaseerde rekstrookjes ontworpen voor het meten van vezelvervorming op basis van de weerstandsverandering. SEM-foto van het apparaat, foto van de ervaring, en resulterend signaal. Krediet:Wetenschap Robotica, doi:10.1126/scirobotics.aax8336
Het team optimaliseerde de voorgestelde door microrobots geassisteerde natte overdrachtsmethode om een verscheidenheid aan apparaten te ontwikkelen. Ze vormden elektronische apparaten door vezels met patronen over te brengen op een printplaat en realiseerden elektrische verbindingen met 25 µm Au-draden. Ze vormden dergelijke elektrochemische sensoren voor mogelijke toepassingen in microkatheters en andere implanteerbare apparaten. De wetenschappers demonstreerden ook de fabricagetechniek met behulp van verschillende lagen van verschillende materialen om een grafeenapparaat met twee uiteinden te vormen op een glasvezel met een diameter van 200 m. Ze kozen voor grafeen vanwege de unieke elektrode-eigenschappen van het materiaal. Ze gebruikten de methode om actieve elektromechanische apparaten te integreren op 3D-substraten, gevolgd door patroonvorming op complexe 3D-structuren. Bijvoorbeeld, ze brachten een Au-patroon over op een microtool met een glazen capillaire vezeltip van 170 µm (ontworpen met behulp van twee-fotonlithografie). Het werk zal de weg effenen voor de ontwikkeling van complexe elektromechanische apparaten op microschaal met behulp van hybride microfabricagetechnieken met brede toepassingen tijdens nauwkeurige klinische biomarkerdetectie en precisiechirurgie.
Op deze manier, Antoine Barbot en een team van interdisciplinaire onderzoekers presenteerden een praktische oplossing om dunne films en 2D-kristallen nat over te brengen met precisie op micrometerniveau op 3D-substraten. Ze ontwikkelden een drijvende magnetische microrobot die in staat is om een voorkeursmagnetisatierichting op te slaan om ze onder een permanent magnetisch veld te manipuleren. Het onderzoeksteam heeft de robotmicrogripper verfijnd door de positie van de magneet aan te passen om te grijpen, uitlijnen en vrijgeven van zwevende 2D-patronen.
De voorgestelde opstelling is eenvoudig, reproduceerbaar en betrouwbaar. De nieuwe fabricagetechniek zal nieuwe toepassingen openen in interventionele chirurgie met elektrochemische sensoren, microactuators en complexe 2D elektronische apparaten. De toekomstige focus voor Barbot et al. zal technische hiërarchische apparaten omvatten op basis van meerlagige Van der Waals 2-D-kristallen om actieve componenten op vezeltips te integreren en uiteindelijk op nanoschaal of microschaal activerende en voelende vermogensgestuurde fiberbots te vormen.
© 2019 Wetenschap X Netwerk
 Team haalt inspiratie uit natuurlijke wonderen om nieuwe materialen te maken
Team haalt inspiratie uit natuurlijke wonderen om nieuwe materialen te maken- Biomimetische chemie - DNA-nabootser is viraal enzym te slim af
- Het verschil tussen polyethyleen en PVC
- Nieuw waargenomen eenwaardige calciumionen vertonen onverwachte metaalachtigheid en ferromagnetisme
- Creature-functie:draaiende scheuren geven dieren taaiheid van superhelden
- Chili gaat toeristen en niet-inwoners op Paaseiland beperken
- EPA stelt mijnbedrijf in staat vergunningen te verkrijgen in de buurt van de baai van Alaska
- Antarctische ijskappen lopen een groter risico om te smelten dan eerder werd gedacht
- Nieuwe kaart van Nederland laat zien waar stikstofreductie het meest effectief is
- Is de binnenkern van de aarde aan het oscilleren en abnormaal vertalen?
Hoofdlijnen
- Zenuwen controleren de bacteriële gemeenschap van het lichaam
- Zowel chimpansees als kinderen bleken bereid te betalen om slechte spelers gestraft te zien
- Binaire splijting: definitie & proces
- Hoe een 3D-diercelmodel te maken
- Celcyclus Feiten
- Kunstmatige selectie (selectieve fokkerij): definitie & voorbeelden
- Commerciële voorouderstests kunnen onthullen hoeveel Neanderthaler-DNA u heeft
- Mexico zegt dat de bedreigde vaquita-bruinvis in gevangenschap is gestorven
- Stadia van de Menselijke Reproductie
- Waarom nanotechnologie meer is dan alleen een modewoord

- Goud en silica nanodeeltjes imiteren de twee gezichten van de god Janus
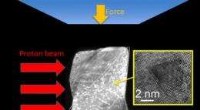
- Wetenschappers pionieren met het testen van nucleaire materialen op nanoschaal
- Natuurkundigen verhitten vrijstaand grafeen om de kromming van rimpelingen te beheersen
- Bouwsteen van thermische computer werkt op 600 K

 Hoe ingenieurs de scheve toren van Pisa rechttrekken
Hoe ingenieurs de scheve toren van Pisa rechttrekken- Wat is farmaceutische wiskunde?
- Homo erectus handbijl gevonden in Oost-Afrika
- De invloed van vroege gezinsvorming op steun op oudere leeftijd
- Grote gegevens, machine learning werpt licht op Aziatische herbebossingssuccessen
- De ontdekking van de zwaartekracht en de mensen die het hebben ontdekt
- Herontdekt Andy Warhol-interview verkent pop-art en queerness
- Onderzoekers ontwikkelen een nieuwe methode om nucleatie te detecteren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | Dutch | Danish | Norway | Spanish | German |

-
Wetenschap © https://nl.scienceaq.com
