Wetenschap
Hoe DEPTHX werkt
 Het autonome onderwatervoertuig DEPTHX Foto © Stone Aerospace/PSC, Inc.
Het autonome onderwatervoertuig DEPTHX Foto © Stone Aerospace/PSC, Inc. Wat heb je nodig om een oceaan op Europa te verkennen, een van de manen van Jupiter? Het is honderden miljoenen kilometers ver weg, en de oceaan ligt onder een ijslaag van minstens 10 kilometer dik. Je hebt waarschijnlijk een ruimtevaartuig nodig om op het ijs te landen, een manier om door het ijs te boren, en een onderwatervoertuig om de oceaan te verkennen en bevindingen terug te brengen naar de aarde.
Dit onderwatervoertuig is een project van Dr. Bill Stone, CEO van Stone Aerospace in Austin, Texas. Stone en zijn collega's hebben een prototype ontwikkeld autonoom onderwatervoertuig (AUV) genaamd Diepe freatische thermische ontdekkingsreiziger (DEPTHX) voor verkenning op afstand en testen het momenteel in een grote onderwatergrot. In dit artikel, we zullen deze revolutionaire AUV onderzoeken, zijn missie en hoe het past in het grotere plan van buitenaardse verkenning.
Het DEPTHX-project maakt deel uit van een serie die door NASA wordt gefinancierd om robotsondes te ontwikkelen die Europa kunnen verkennen (we zullen later bespreken waarom Europa zo'n interessant doelwit is). Stone Aerospace ontworpen, bouwde en exploiteert DEPTHX in samenwerking met haar partners:
- Carnegie Mellon University's Field Robotics Center - ontwikkelt en test navigatiesoftware
- SwRI, Colorado School of Mines, de Universiteit van Colorado, Boulder en het Lunar and Planetary Laboratory van de Universiteit van Arizona - raadplegen over de wetenschappelijke lading met als doel het detecteren van microbieel leven
- Universiteit van Texas in Austin - biedt logistieke ondersteuning tijdens DEPTHX-tests
 DEPTHX aan dek tijdens een test Foto © Stone Aerospace/PSC, Inc.
DEPTHX aan dek tijdens een test Foto © Stone Aerospace/PSC, Inc. Het DEPTHX-project is ontworpen om deze vragen te beantwoorden:
- Kan een volledig geautomatiseerde AUV een onbekende, driedimensionale wereld van dag tot dag zonder hulp van mission control? Daarbij, kan het kaarten maken en gebruiken om te navigeren en terug te keren naar een "thuislocatie" om zijn bevindingen te rapporteren?
DEPTH X heeft tanktests voltooid (inclusief systeemintegratie en mapping) en bereidt zich nu voor om tests te ondergaan in een volledig onbekende omgeving:Zacatón in Mexico cenote .
Volgende, laten we de AUV en zijn systemen eens nader bekijken.
Cenotes
Cenotes (uitgesproken als "say-NO-tay") zijn grote zoetwater-zinkgaten op het schiereiland Yucután in Mexico. Deze cenotes werden gevormd toen ondergronds water in de poreuze kalksteen gesteente dat het hele schiereiland vormt. De cenote in Zacáton is een van de vijf verbonden cenotes en wordt beschouwd als de diepste ter wereld. Zacáton heeft ook een hydrothermale bron in het.
De DEPTHX AUV
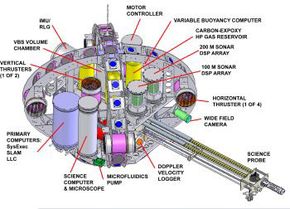 DEPTHX interne structuren Afbeelding © Stone Aerospace/PSC, Inc.
DEPTHX interne structuren Afbeelding © Stone Aerospace/PSC, Inc. De DEPTHX AUV is eivormig, met een lange as van 4,26 meter (13,97 voet), een korte as van 3,04 m (9,97 ft), en een gewicht van 1,3 ton (1,43 short tons). Het kan vrij bewegen, zweven en muurspoor in drie dimensies zonder enige externe commando's. DEPTHX heeft een minimale kruissnelheid van 0,2 meter per seconde (0,65 voet per seconde) voor het in kaart brengen en kan zo diep gaan als 1, 000 m (3, 280 voet). Om autonoom te opereren, DEPTHX moet het volgende kunnen:
- Manoeuvreren
- Navigeer en kaart
- Proces informatie
- Macht zelf
- Communiceren
- Milieumetingen en monsters nemen
Wendbaarheid
 Een close-up van een DEPTHX boegschroef Afbeelding © Stone Aerospace/PSC, Inc.
Een close-up van een DEPTHX boegschroef Afbeelding © Stone Aerospace/PSC, Inc. DEPTHX heeft zes boegschroeven (vier horizontaal en twee verticaal), waardoor het in drie dimensies kan manoeuvreren. Het voertuig kan worden gemanoeuvreerd met slechts twee van de horizontale en een van de verticale stuwraketten - de extra's zijn voor back-up.
DEPTHX kan ook zweven. Om zijn positie vast te houden, het zou de stuwraketten kunnen gebruiken, maar dit zou snel kostbaar batterijvermogen verbruiken. In plaats daarvan, het voertuig is uitgerust met twee motoren met variabel drijfvermogen (VBE) . Een VBE-computer voelt de druk, temperatuur en zoutgehalte (zoutgehalte) van het omringende water en berekent het drijfvermogen van het vaartuig. De computer opent of sluit vervolgens kleppen waarmee pompen of gas onder druk water in of uit kunnen laten. Net als bij de stuwraketten, er is ingebouwde redundantie en de DEPTHX kan zweven met slechts één VBE.
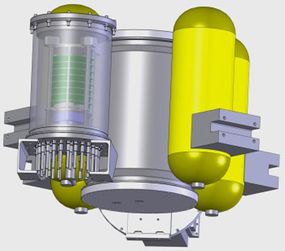 Motoren met variabel drijfvermogen zorgen ervoor dat DEPTHX kan zweven. Afbeelding © Stone Aerospace/PSC, Inc.
Motoren met variabel drijfvermogen zorgen ervoor dat DEPTHX kan zweven. Afbeelding © Stone Aerospace/PSC, Inc. Navigatie en kaarten
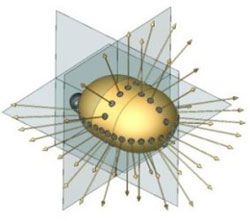 Geometrische reeks van de sonarsensormogelijkheden van DEPTHX Afbeelding © Stone Aerospace/PSC, Inc.
Geometrische reeks van de sonarsensormogelijkheden van DEPTHX Afbeelding © Stone Aerospace/PSC, Inc. DEPTHX heeft 54 sonarsensoren die rond het frame zijn verdeeld en worden bestuurd door twee sonararrays . De sonar gebruikt pulsen van hoogenergetische geluidsgolven en hun reflecties om objecten binnen een straal van 250 tot 300 meter van het voertuig te lokaliseren. De informatie die het verzamelt, wordt doorgegeven aan boordcomputers voor navigatiecontrole.
Naast sonar, DEPTHX navigeert met behulp van versnellingsmeters, dieptemeters en een traagheidsgeleidingseenheid. Een Doppler-snelheidslogger bepaalt hoe snel het voertuig beweegt en geeft deze informatie door aan de primaire computer, die de snelheid van het voertuig aanpast.
Terwijl DEPTHX beweegt, de computers gebruiken de sonarinformatie om 3D-beelden op te bouwen, die in het computergeheugen worden gelegd om een progressieve geometrische kaart te maken. De techniek heet Simultane Lokalisatie en Mapping (SLAM) . Bill Stone en zijn collega's ontwikkelden een door duikers aangedreven SLAM-apparaat dat ze gebruikten om de Wakulla Springs-aquifer in Florida in kaart te brengen. DEPTHX gebruikt zijn geïnternaliseerde kaart voor navigatie, zodat het naar elke specifieke locatie kan gaan zonder de hulp van externe navigatie, zoals GPS.
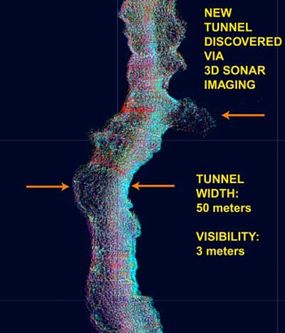 Kaart van een deel van Wakulla Springs aquifer verkregen door Stone Aerospace Afbeelding © Stone Aerospace/PSC, Inc.
Kaart van een deel van Wakulla Springs aquifer verkregen door Stone Aerospace Afbeelding © Stone Aerospace/PSC, Inc. Informatieverwerking
DEPTHX heeft verschillende boordcomputers voor specifieke taken. Men regelt voertuigoperaties, SLAM en navigatie; men bestuurt de VBE's; en één controleert experimenten en analyseert gegevens. In totaal, deze computers bevatten meer dan 30 microprocessors, van 8-bits controllers tot Pentium 4-chips. DEPTHX is geprogrammeerd voor autonoom functioneren en analyseren.
Interne kracht en communicatie
DEPTHX heeft twee batterijtorens bestaande uit oplaadbare lithium-ionbatterijen. De batterijen bieden tot acht uur stroom.
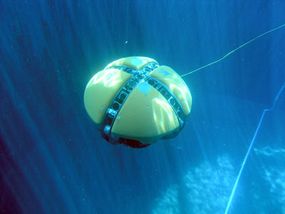 De DEPTHX AUV onderwater Afbeelding © Stone Aerospace/PSC, Inc.
De DEPTHX AUV onderwater Afbeelding © Stone Aerospace/PSC, Inc. Het kan communiceren via wifi op het oppervlak en via een enkele optische vezelkabel wanneer het onder water is. De kabel wordt gebruikt om indien nodig gegevens te uploaden of stuurcommando's te ontvangen.
Omgevingsmetingen en monsters
DEPTHX zal zijn SLAM-technologieën gebruiken om in kaart te brengen en afbeeldingen te maken terwijl het onderzoekt. Het heeft een groothoekbeeldcamera en kan ook omgevingsmetingen doen, zoals temperatuur, druk en concentraties van verschillende chemicaliën. Het heeft ook een uitschuifbare arm met een wetenschappelijke sonde waarmee het zowel vloeibare als vaste monsters kan verzamelen en een microscoop met drukclassificatie aan boord om te helpen bij de detectie van microbieel leven.
Europa verkennen
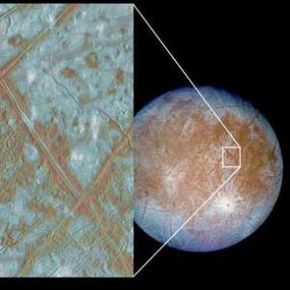 Europa's ijsvlotten zijn ijsblokken die aantonen dat Europa in het verleden een ondergrondse oceaan kan hebben gehad. Afbeelding met dank aan NASA Jet Propulsion Laboratory
Europa's ijsvlotten zijn ijsblokken die aantonen dat Europa in het verleden een ondergrondse oceaan kan hebben gehad. Afbeelding met dank aan NASA Jet Propulsion Laboratory Dus, waarom is Europa, een binnenmaan van Jupiter, zo'n interessant doel voor verkenning? De ruimtesondes Voyager en Galileo toonden aan dat Europa bedekt was met een ijskap. Omdat Europa zo dicht bij Jupiter staat, de zwaartekracht van de planeet trekt eraan, afwisselend uitrekken en comprimeren van de maan in zijn baan. Deze zwaartekrachten creëren warmte in de maan. Deze warmte ontsnapt door vulkanische activiteit en kan de onderkant van de ijskap opwarmen, het creëren van een vloeibare oceaan.
Bewijs voor een vloeibare oceaan bestaat in het gebroken patroon van de ijskap, die 10 kilometer (6,21 mijl) dik is. Vergelijkbare patronen zijn te zien in de Arctische ijskap, zoals waargenomen door satellieten vanuit een baan om de aarde. Metingen van het magnetische veld geven aan dat de toekomstige oceaan zout zou kunnen zijn. Ook, berekeningen geven aan dat er voldoende warmte wordt gegenereerd door getijdenkrachten om een vloeibare oceaan te maken.
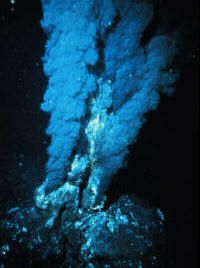 Hydrothermale ventilatieopening in de oceaanbodem Afbeelding met dank aan NOAA/ U.S. Dept. of Commerce
Hydrothermale ventilatieopening in de oceaanbodem Afbeelding met dank aan NOAA/ U.S. Dept. of Commerce Als er een vloeibare oceaan bestaat en er vulkanische activiteit van getijdenkrachten bestaat, dan is er misschien warmwaterkraters op de "oceaan" vloer, zoals die gevonden op aarde in de buurt van mid-oceanische ruggen.
Op aarde, we weten dat veel verschillende levensvormen overleven rond hydrothermale bronnen in gemeenschappen die gebaseerd zijn op chemosynthese , de vorming van organische verbindingen met behulp van geothermische energie. Chemosynthetische bacteriën vormen in deze gemeenschappen de basis van de voedselketen. Andere organismen binnen deze gemeenschappen zijn onder meer reuzenkokerwormen, mosselen, krabben en vissen.
Astrobiologen geloven dat het leven vloeibaar water nodig heeft, koolstofhoudende (organische) verbindingen, en een bron van energie. Europa lijkt deze ingrediënten ook te hebben en, daarom, leven zou kunnen hebben.
Dus een missie naar Europa zou een AUV omvatten die de oceaan zou kunnen verkennen, wetenschappelijke experimenten uitvoeren en resultaten terugsturen naar de aarde.
Aerospace is van plan een volgend voertuig te bouwen, genaamd UITHOUDINGSVERMOGEN , die nog een stap verder gaat. Het zal kleiner zijn, maar net zo capabel als DEPTHX. De test van ENDURANCE zal zijn om een meer op Antarctica te verkennen dat onder de ijskap is ondergedompeld. NASA ontwikkelt momenteel de technologie om door kilometers ijs in het meer te smelten. ENDURANCE zal door het smeltgat in het meer worden neergelaten voor verkenning met behulp van wetenschappelijke principes en technologieën, ontwikkeld en getest door DEPTHX.
Voor veel meer informatie over DEPTHX en gerelateerde onderwerpen, bekijk de links op de volgende pagina.
DEPTHX:veel meer informatie
Gerelateerde HowStuffWorks-artikelen
- Hoe de aarde werkt
- Hoe onderzeeërs werken
- Hoe vulkanen werken
- Hoe radar werkt
- Hoe SCUBA werkt
- Hoe robots werken
- Hoe GPS-ontvangers werken
- Hoe lithium-ionbatterijen werken
Meer geweldige links
- Stenen ruimtevaart
- Galileo-project:Europa
- Zacatón 's werelds diepste:onderzoek naar met water gevulde zinkgaten
bronnen
- Astrobiologie Wetenschap en technologie voor het verkennen van planeten http://ranier.hq.nasa.gov/astep/astep.html
- O'Brien, Jeffrey M. "Naar de hel en terug." Bedrade, December 2004. http://www.wired.com/wired/archive/12.12/stone.html?pg=2&topic=stone&topic_set
- Molenaar, Megan. "DepthX:missie 1 volbracht." Populaire wetenschap, Maart 2007. http://www.popsci.com/popsci/aviationspace/15d1d7f04b5c0110vgnvcm1000004eecbccdrcrd.html
- Stone Aerospace http://www.stoneaerospace.com

Hoofdlijnen
- Wanneer wordt een mutatie in een DNA-molecuul doorgegeven aan nakomelingen?
- Kunnen we onze organen klonen voor gebruik bij een transplantatie?
- Wat is de structuur van stamcellen?
- Hoe hoogte te bepalen via het skelet
- Profase: wat gebeurt er in dit stadium van mitose en meiose?
- Welke gebeurtenis volgt DNA-replicatie in een celcyclus?
- Gregor Mendel - Vader van genetica: biografie, experimenten en feiten
- Waarom blijven liedjes in mijn hoofd hangen?
- Is het Ida-fossiel de ontbrekende schakel?






 Hoe beïnvloedt erosie de aarde?
Hoe beïnvloedt erosie de aarde? - Suiker lost op in water sneller dan zoutwetenschappelijke projecten
- Manieren om het ecologische evenwicht te handhaven
- Welk type plaatgrens is geassocieerd met Rift Valleys?
- Zijn psychische aandoeningen genetisch bepaald?
- Verschil tussen een staafdiagram & cirkeldiagram
- Dominant Allele: wat is het? & Waarom gebeurt het? "(with Traits Chart)
- Hoe de diameter van de omtrek te berekenen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
