Wetenschap
Chaotische manier om insectenachtige gangen voor robots te creëren
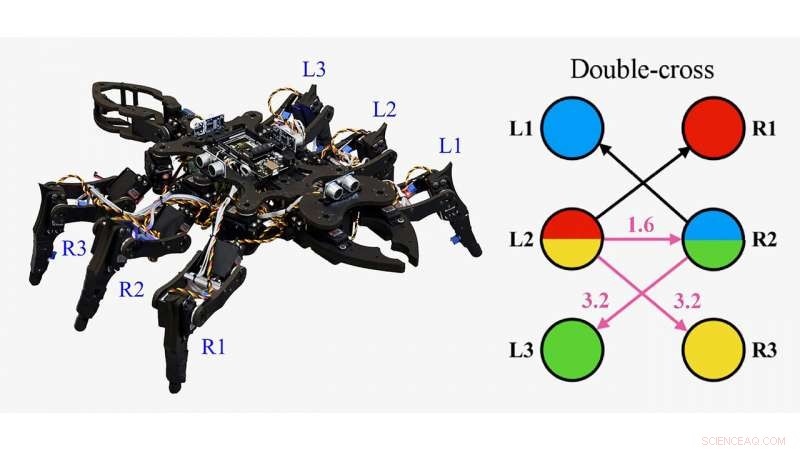
Onderzoekers in Japan en Italië omarmen chaos en niet-lineaire fysica om insectachtige gangen te creëren voor kleine robots - compleet met een voortbewegingscontroller om een brein-machine-interface te bieden. Weergave van hun experimentele robot en koppelingsschema's voor zijn gangen. Krediet:Ludovico Minati
Onderzoekers in Japan en Italië omarmen chaos en niet-lineaire fysica om insectachtige gangen te creëren voor kleine robots - compleet met een voortbewegingscontroller om een hersen-machine-interface te bieden.
Biologie en natuurkunde zijn doordrongen van universele fenomenen die fundamenteel geworteld zijn in niet-lineaire natuurkunde, en het inspireerde het werk van de onderzoekers.
In het journaal Chaos , de groep beschrijft het gebruik van het Rössler-systeem, een stelsel van drie niet-lineaire differentiaalvergelijkingen, als bouwsteen voor centrale patroongeneratoren (CPG's) om de gang van een robotinsect te regelen.
"De universele aard van onderliggende fenomenen stelde ons in staat om aan te tonen dat voortbeweging kan worden bereikt via elementaire combinaties van Rössler-systemen, die een hoeksteen vormen in de geschiedenis van chaotische systemen, " zei Ludovico Minati, van het Tokyo Institute of Technology en de Universiteit van Trento.
Fenomenen gerelateerd aan synchronisatie stellen de groep in staat om zeer eenvoudige netwerken te creëren die complexe ritmische patronen genereren.
"Deze netwerken, CPG's, zijn de basis van beenbeweging overal in de natuur, " hij zei.
De onderzoekers begonnen met een minimalistisch netwerk waarbij elke instantie wordt geassocieerd met één been. Het veranderen van de gang of het creëren van een nieuwe kan worden bereikt door eenvoudig kleine wijzigingen aan te brengen in de koppeling en de bijbehorende vertragingen.
Met andere woorden, onregelmatigheden kunnen worden toegevoegd door individuele systemen of het hele netwerk chaotischer te maken. Voor niet-lineaire systemen, een verandering van output is niet evenredig met een verandering van input.
Dit werk laat zien dat het Rössler-systeem, buiten zijn vele interessante en ingewikkelde eigenschappen, "kan ook met succes worden gebruikt als substraat om een bio-geïnspireerde voortbewegingscontroller voor een insectenrobot te bouwen, ' zei Minati.
Hun controller is gebouwd met een elektro-encefalogram om een brein-computerinterface mogelijk te maken.
"Neuro-elektrische activiteit van een persoon wordt geregistreerd en niet-lineaire concepten van fasesynchronisatie worden gebruikt om een patroon te extraheren, "zei Minati. "Dit patroon wordt vervolgens gebruikt als basis om de dynamiek van de Rössler-systemen te beïnvloeden, die het looppatroon voor de insectenrobot genereren."
De onderzoekers maken twee keer gebruik van de fundamentele ideeën van niet-lineaire dynamiek.
"Eerst, we gebruiken ze om biologische activiteit te decoderen, dan in de tegenovergestelde richting om bio-geïnspireerde activiteit te genereren, " hij zei.
De belangrijkste implicatie van dit werk is dat het "de algemeenheid aantoont van niet-lineaire dynamische concepten zoals het vermogen van het Rössler-systeem, die vaak wordt bestudeerd in een abstract scenario, " zei Minati, "maar wordt hier gebruikt als basis om biologisch plausibele patronen te genereren."
 Onderzoekers komen op de golflengte van de consument met InSb-technologie
Onderzoekers komen op de golflengte van de consument met InSb-technologie- Onderzoekers zorgen ervoor dat neurale netwerken met succes DNA-schade door UV-straling detecteren
- Een lasergestuurde programmeerbare contactloze transferdruktechniek
- Mengsels van voedselingrediënten gevoeliger voor klimaatverandering, studie vondsten
- Briljant ijzermolecuul zou kunnen zorgen voor goedkopere zonne-energie
- Hoe de klimaatverandering te stoppen:zes manieren om de wereld een betere plek te maken
- Plastic planeet:wereldwijd doordringende microplastics volgen
- NASA vindt enkele sterke stormen in de Atlantische Oceaan, potentiële tropische cycloon
- Hoeveel water stroomt er naar landbouwirrigatie?
- Elektrische voertuigen zouden een verademing zijn voor Houston
Hoofdlijnen
- Feiten over de menselijke schedel voor kinderen
- Het hormoon dat uw hond agressief zou kunnen maken
- Moeite met onthouden? Vertel je vrienden om een wandeling te maken
- Lichaamssystemen en hun functies
- Kan een Vision Board uw toekomst echt beïnvloeden?
- Waarom lopen mensen meestal in dezelfde richting?
- "What is Pascals Triangle?
- Hoe een microscoop te gebruiken om cellen te zien
- Octopussen gestrand op het strand van Wales - hier zijn de wetenschappelijke theorieën waarom
- Met behulp van micro-sized gesneden metalen draden, team baant weg naar nieuwe toepassingen voor terahertz-golven
- De magische golflengte van cadmium

- Kwantumfysica biedt inzicht in de expressiviteit van muziek
- Fysica van tumoren:kankercellen worden gefluïdiseerd en persen door weefsel

- De beste plaatsen om windturbines elektriciteit te laten produceren


 Praktische maatregelen om de genderkloof bij jonge volwassenen te helpen overbruggen
Praktische maatregelen om de genderkloof bij jonge volwassenen te helpen overbruggen- Superzware zwarte gaten remmen de geboorte van sterren
- Hoe de afmetingen van een vierkant te vinden met het gebied
- Skelet van sabeltandtijger geveild
- 250, 000 inwoners van Melbourne verliezen water door houtkap
- Blitse Science Oscars om sterren van onderzoekers te maken
- Hoe belangrijk is de media in afgelegen gebieden?
- Wildvuurrook heeft invloed op de fotosynthese. Hier is hoe
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
