Wetenschap
Kunnen vleermuizen ons helpen een betere auto zonder bestuurder te ontwerpen?

De vluchtkamer is een geautomatiseerde omgeving waarin vleermuizen kunnen vliegen en over de ruimte kunnen onderhandelen binnen een gecontroleerde omgeving. Het vlieggedrag van de vleermuis in deze kamer wordt automatisch gevolgd met behulp van een groot aantal hogesnelheidscamera's die u in de afbeelding kunt zien. Krediet:Universiteit van Californië - Berkeley
Fruitvleermuizen zijn niet de eerste woorden die in je opkomen als je aan zelfrijdende auto's denkt. Maar tijdens hun nachtelijke zoektocht naar fruit en nectar lossen ze routinematig veel van de technische uitdagingen op die de inspanningen om veilige, betrouwbare en efficiënte autonome voertuigen te ontwikkelen hebben opgehouden.
Het navigatiesysteem van de vleermuizen is ontworpen door 's werelds beste ingenieur:evolutie. Michael Yartsev, universitair docent bio-engineering en neurowetenschappen, bestudeert de patronen van bedrading en vuren in de hersenen van vleermuizen die de natuur heeft bedacht om ze in het pikkedonker van hier naar daar te krijgen. En zonder tegen obstakels of elkaar aan te vliegen.
Het Bakar Fellows-programma ondersteunt een nieuwe poging in zijn laboratorium om de neurologische "verkeersregels" van vleermuizen te vertalen in computeralgoritmen om de ontwikkeling van navigatiesystemen voor zelfrijdende auto's te begeleiden.
Dr. Yartsev beschrijft de neurobiologische principes die zijn laboratorium heeft ontdekt en hoe de inzichten een routekaart naar de toekomst kunnen bieden.
V. Hoe heb je besloten om je te concentreren op vleermuis-echolocatie als model voor het ontwerpen van autonome voertuigen?
A. Ik begon met fruitvleermuizen te werken voor mijn Ph.D. in Israël. Ik was geïnteresseerd in de neurale basis van ruimtelijke representatie en navigatie, en echolocerende vleermuizen zijn een prachtig systeem om dit te onderzoeken.
Ze kunnen objecten detecteren met een zeer fijne resolutie, terwijl ze vliegen met snelheden tot 100 mijl per uur. Ze hebben superieure vaardigheden ontwikkeld voor nauwkeurige waarneming, waarneming en beweging, niet alleen als individu, maar ook als onderdeel van een groep.
V. Hoe heeft dit fundamentele neurowetenschappelijke onderzoek je naar auto's zonder bestuurder geleid?
A. Een paar jaar geleden begon ik te leren over de sector van autonome voertuigen en ik realiseerde me dat we veel zouden kunnen bijdragen. Maar het werd pas echt praktisch met de steun van mijn Bakar Fellowship.
V. Zijn deze vleermuizen echt blind zoals het gezegde luidt?
A. Nee, de hele uitdrukking "blind als een vleermuis" is verkeerd. Onze vleermuizen - Egyptische fruitvleermuizen - hebben ook een sterk ontwikkeld visueel systeem. Ze zijn behoorlijk verbazingwekkend in zowel echolocatie als gezichtsscherpte. Ze gebruiken echolocatie om 's nachts te navigeren.
V. Hoe bestudeer je vleermuizen in het donker?
A. We hebben volledig geautomatiseerde vluchtkamers ontworpen waar vleermuizen vrij kunnen vliegen. We bestuderen hun sonarpatronen met behulp van ultrasone microfoons. We detecteren hun eigen transmissies - hun echolokalisatie klikken. Het hele systeem is draadloos.
V. Van punt A naar punt B komen is slechts de helft van de uitdaging voor autonome auto's, nietwaar?
A. Ja, dat klopt. Autonome voertuigen moeten nauwkeurig navigeren, maar ook reageren op verkeersomstandigheden:op de nabijheid, snelheid en richting van andere zelfrijdende auto's. Dit noemen we collectief gedrag. De huidige technologie heeft niet uitgevonden hoe het probleem van communicatie tussen voertuigen kan worden opgelost. De auto's worden behandeld als individuen die door hun omgeving navigeren.
Om dit complexere vermogen te bestuderen, kunnen we vleermuizen samen laten vliegen en naar hun doelen navigeren.
V. Wat heb je geleerd over de bedrading in hun hersenen waardoor ze collectief blind kunnen vliegen?
A. Recente inspanningen waarbij ons laboratorium betrokken was, slaagden erin om grote delen van de cortex van de vleermuishersenen in kaart te brengen. We hebben de precieze locatie van de neuronsignalerings- en waarnemingscentra voor echolocatie kunnen identificeren. Met behulp van draadloze neurofysiologische systemen kunnen we de neurale signalen van die gebieden opnemen.
Verder, toen we begonnen te kijken naar het neurologische gedrag van vleermuizen die als groepen met elkaar omgaan, waren we verrast te ontdekken dat ze een interessant niveau van synchroniciteit tussen de hersenen hebben. Er is een bepaald frequentiebereik in de hersenactiviteit waar deze synchronie het meest uitgesproken wordt.
Dit biedt vermoedelijk de optimale balans tussen signaalsterkte en snelheid om bijna foutloos te navigeren en te communiceren. Hetzelfde probleem zal moeten worden opgelost als er veel autonome voertuigen op de weg zijn. Ze moeten informatie effectief met elkaar communiceren en we weten momenteel niet wat de meest optimale manier is om dat te doen. Evolutie zou hier een belangrijk licht op kunnen werpen.
V. Hoe kan deze bevinding bijdragen aan de ontwikkeling van autonome voertuigen?
A. Het kan ons helpen om de beste sonarfrequentie te identificeren, evenals de optimale frequentieband voor auto's om het meest effectief met elkaar te communiceren. Voor zelfrijdende auto's wil je geen navigatiesysteem dat 95% nauwkeurig is. Je hebt 99,999999999% nodig. Je hebt een precisieniveau van Ferrari nodig, geen budgetauto.
Elk cijfer boven 99% is rekenkundig duur om te ontwikkelen. Visuele sensoren met dat precisieniveau zouden erg kostbaar zijn. Maar visuele i.d. is ook belangrijk. We zien de twee modaliteiten als complementair.
V. Hoe heeft de autonome voertuigindustrie op uw werk gereageerd?
A. Ik heb nog nooit een dag van mijn leven in de industrie gewerkt. Dankzij het Bakar Fellows-programma kan ik heen en weer met de ontwikkelaars van autonome voertuigen. Het kan ons onderzoek focussen, zodat we echt een bijdrage kunnen leveren. Zonder die feedback zouden we onze wielen draaien.
 Wetenschappers ontwikkelen moleculaire code voor melanine-achtige materialen
Wetenschappers ontwikkelen moleculaire code voor melanine-achtige materialen- Scheiding van sporen acetyleen van ethyleen in ultramicroporeuze metaal-organische structuren
- Team ontwikkelt nieuwe manieren om medicijnen te maken en af te leveren voor een breed scala aan immuun-medicinale neuropathieën
- Levensduur van brandstofcellen gemaximaliseerd met kleine hoeveelheden metalen
- Natuurlijke regenboogkleurstoffen microbieel geproduceerd
- NASA vindt zware regen in nieuwe tropische cycloon Hola bij Vanuatu
- Het identificeren van de belangrijkste hotspots voor natuurbehoud in Canada wijst op een probleem
- 3 Major Ocean Zones
- Houtkap resulteert in aanhoudende tekorten in de zomerstroom
- Midden-Amerika zet zich schrap voor extreem gevaarlijke orkaan Eta
Hoofdlijnen
- Ontdekking en naamgeving van de oudst bekende dinosaurus van Afrika
- Commerciële voorouderstests kunnen onthullen hoeveel Neanderthaler-DNA u heeft
- Wat is ureum?
- Taxonomie (biologie): definitie, classificatie en voorbeelden
- Zullen tropische bergboomsoorten zich aanpassen aan de opwarming?
- Kun je je familie aanzien voor bedriegers?
- Stages of Mitosis (Cell Division)
- Hoe protisten de muren van algen kraken
- Wat zijn de niveaus van organisatie in de biologie?
- Verhaaleinde generatie met behulp van incrementele codering
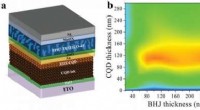
- Nieuwe studie presenteert efficiënte, oplossing-verwerkt, hybride tandem zonnecellen
- AI is misschien beter voor het detecteren van radarsignalen, het delen van spectrum mogelijk maken

- Meer chatten, minder he, onderweg dankzij Nvidia AI maakt sprongen met BERT

- Amazon voegt Starbucks-topman Rosalind Brewer toe aan bestuur


 Welke aanpassingen zorgen ervoor dat Toco Toucans tot leven komen?
Welke aanpassingen zorgen ervoor dat Toco Toucans tot leven komen? - Hoe u uw gazon maait voor sprinkhanen
- Miljoenen zonder stroom, grote overstroming in orkaan Florida
- Wetenschappers ontdekken een nieuwe manier om resistente bacteriën aan te pakken
- Dieren gevonden in de regio Piemonte van Georgië
- Knaagdieren van Arizona
- Smeltend ijs vormt een vluchtig ecologisch voordeel, maar een aanhoudende wereldwijde bedreiging
- Hoe u een back-up kunt maken van het leven op aarde voorafgaand aan een doemscenario?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
