Wetenschap
Hoe wetenschappers de controllers voor robotmanipulators op het Chinese ruimtestation hebben ontworpen
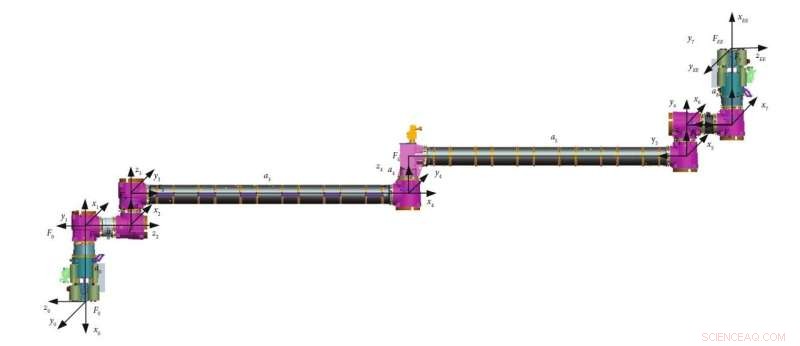
In het onderzoek worden de simulatieresultaten van ons recursieve samengestelde adaptieve regelalgoritme gepresenteerd in vergelijking met het direct adaptieve regelalgoritme. De coördinatenframes van de manipulator van het Chinese ruimtestation zijn hier uitgezet. Credit:Ruimte:Wetenschap &Technologie
In het proces van de bouw en het routine-onderhoud van het Chinese ruimtestation speelt de manipulator een aanzienlijk belangrijke rol die een aantal belangrijke taken kan uitvoeren, zoals transpositie-docking, dagelijks onderhoud en extra extravehicular activiteiten. De hoge nauwkeurigheid en dynamische prestaties van de manipulator zijn noodzakelijk voor het succesvol voltooien van deze taken, die vaak kunnen worden gehandhaafd door besturingen die zijn ontworpen op basis van het dynamische model.
In de praktijksituaties is het echter meestal onrealistisch om alle traagheidsparameters precies te verkrijgen. Daarom is de adaptieve besturing ontwikkeld om de convergentie van de volgbesturing te verzekeren, zelfs als het systeem onzekere of langzaam veranderende parameters heeft. In een onderzoekspaper dat onlangs is gepubliceerd in Space:Science &Technology , Dr. Li van het State Key Laboratory of Management and Control for Complex Systems, stelde een nieuwe recursieve implementatie voor van samengestelde adaptieve besturing voor robotmanipulators.
Eerst bekeek Dr. Li de samengestelde adaptieve controller die werd voorgesteld door Slotine en Li. Adaptieve controle kan zorgen voor convergentie van trackingcontrole, zelfs als het systeem onzekere of langzaam veranderende parameters heeft. In het algemeen kan dit schema worden onderverdeeld in twee klassen, de directe aanpassing en de indirecte aanpassing, volgens het signaal dat de parameterupdatewet aanstuurt.
In de eerste categorie wordt de parameterupdate aangedreven door de volgfouten, terwijl in de tweede categorie de parameters worden aangepast volgens de voorspellingsfouten, meestal van de gefilterde koppelmomenten. Adaptieve controle op basis van trackingfouten kan meestal een globale trackingconvergentie garanderen; de convergentie van geschatte parameters heeft echter strengere voorwaarden. Ter vergelijking:de indirecte adaptieve besturing heeft een hogere parameterconvergentiesnelheid, maar het is over het algemeen moeilijk om de stabiliteit van de volgfouten te verkrijgen.
Door de twee methoden te combineren, heeft de bekende samengestelde adaptieve controller de voordelen van beide, waarbij de parameteraanpassing wordt aangedreven door zowel volgfouten als voorspellingsfouten. De computationele complexiteit van deze adaptieve besturingsmethoden is echter een belangrijke beperking in de praktische robotmanipulatoren, met name voor het geval met een hoge mate van vrijheid. Tot nu toe hebben slechts enkele werken aandacht besteed aan de recursieve uitvoering van de indirecte adaptieve of de samengestelde adaptieve controller, waarschijnlijk omdat het gebruik van de voorspellingsfout uitgedrukt door de regressiematrix het erg moeilijk maakt om de volgorde van de computationele complexiteit te verminderen.
Om de bovengenoemde problemen op te lossen, herschreef Dr. Li de Newton-Euler-formulering door gebruik te maken van de vorm van algemene matrices van het klassieke recursieve Newton-Euler-algoritme. Vervolgens wordt de recursieve samengestelde adaptieve controlemethode ontworpen en wordt de stabiliteit van de voorgestelde methode geverifieerd door een geschikte Lyapunov-functie te selecteren. De computationele complexiteit van de voorgestelde recursieve composietaanpassing is veel minder dan die in de bestaande studies. De reden is dat in de oorspronkelijke samengestelde controller geen aandacht is besteed aan de computationele aspecten ervan. Aangezien de rekenbelasting van de voorgestelde controllers op dezelfde schaal ligt als de recursieve direct adaptieve controllers, wordt een vergelijking tussen deze twee methoden uitgevoerd.
De resultaten laten zien dat de volgfouten duidelijk worden verminderd door gebruik te maken van de recursieve samengestelde adaptieve controller, en dat de parameterschattingen sneller convergeren met de recursieve samengestelde adaptieve controller. In het simulatiegedeelte wordt de manipulator van het Chinese ruimtestation gebruikt als simulatievoorbeeld en de resultaten verifiëren de effectiviteit van het voorgestelde recursieve algoritme. Bovendien, aangezien de rekenbelasting lineair is met het aantal gewrichten, is de voorgestelde methode vooral aantrekkelijk voor de redundante multijoint-manipulator.

Hoofdlijnen
- Hoe tuinieren onder water de Atlantische Oceaan kan herstellen
- Hoe hybride plantenrassen de uitdagingen van voedselzekerheid en klimaatverandering kunnen aanpakken
- Ondergrondse schimmelinteracties met bomen helpen bij het verklaren van invasies van niet-inheemse planten
- Nieuwe studie benadrukt de effecten van een wereldwijde strategie om de antibioticaconsumptie in de productie van voedseldieren te verminderen
- Studie van gierende kraanvogels onthult een band tussen paren zelfs voordat ze de paringsleeftijd hebben bereikt
- Hebben Prokaryotes celwanden?
- Zenuwen controleren de bacteriële gemeenschap van het lichaam
- Ongebreidelde consumptie van nijlpaardentanden in combinatie met onvolledige handelsrecords brengen bedreigde nijlpaarden in gevaar
- Samengestelde ogen een continu kenmerk van evolutie
- IoT gebruiken, AI- en cloudtechnologieën om thuiszorg te bevorderen

- Uit onderzoek blijkt dat dikkere bestrating onderweg kosteneffectiever is

- Verticale pensioneringsdorpen zijn in opkomst, en ze zijn ook hightech

- Liz Weston:wie krijgt de sleutels van je digitale landgoed?

- In Quebec, Canada's nieuwste hydro-elektrische dammen bijna klaar


 Lijst van zoogdieren in Tennessee
Lijst van zoogdieren in Tennessee- Project telt af als doelwitten voor Ariel exoplaneten
- Drijft omgevingsstress de migratie?
- Smartphonemarkt blijft dit jaar koel:voorspelling
- Voordelen en nadelen van hydraulische systemen
- Berekening van beoordelingsschalen
- Geitenmelkkefir is bewezen goed voor je gezondheid
- Astronomen onderzoeken de chemische samenstelling van een nabij stervormend dwergstelsel
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
