Wetenschap
LoCoQuad:een op spinachtigen geïnspireerde robot voor onderzoeks- en onderwijsdoeleinden
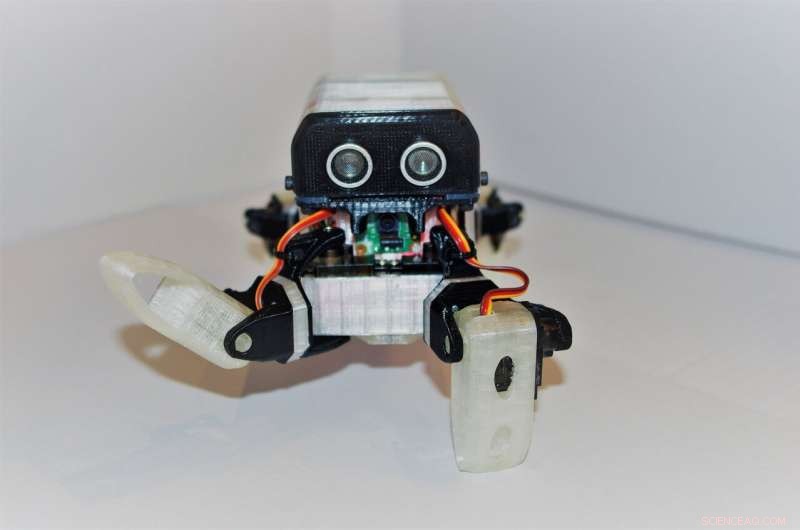
LoCoQuad, de door de onderzoekers ontwikkelde robot. Krediet:Bernal &Civera
Diergedrag en de biologische mechanismen die eraan ten grondslag liggen, behoren tot de grootste inspiratiebronnen voor roboticastudies. In de afgelopen tien jaar of zo, talloze onderzoeksteams van universiteiten en bedrijven over de hele wereld hebben geprobeerd robots te ontwikkelen die het gedrag of de structuur van specifieke diersoorten nabootsen.
Een van de laatste pogingen is gedaan door twee onderzoekers van de Universiteit van Zaragoza, Manuel Bernal Lecina en Javier Civera, die onlangs een viervoetige robot ontwikkelde genaamd LoCoQuad, geïnspireerd door spinachtigen. Deze robot, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, zou een aantal toepassingen kunnen hebben in onderzoek en onderwijs op het gebied van robotica.
"Deze onderzoeksreis begon met een zomerproject dat mijn bachelorscriptie werd, Bernal-Lecina vertelde TechXplore. "Het oorspronkelijke idee was om een super goedkoop robotplatform te bouwen dat in staat is om ad-hoc basisbewegingen te maken, zoals rotatie, wandelen, en het aannemen van specifieke poses. Ik begon met het bouwen van basisprototypes en het testen van de voordelen van elke iteratie, zoeken naar de juiste typologie en het beste prijs-kwaliteit compromis voor actuatoren, controle-eenheden, en batterijen."
Nadat hij uitgebreid onderzoek had gedaan naar goedkope robots en een aantal componenten had geproduceerd met behulp van 3D-printen, Bernal-Lecina ging samenwerken met Javier Civera, zijn mentor aan de universiteit, over de creatie van een nieuwe robot. Hun doel was om een goedkoop robotplatform te ontwikkelen dat als benchmark kan worden gebruikt om algoritmen voor het leren van versterking (RL) te trainen en te evalueren.
"Onze studie ging in op de huidige behoefte aan robotplatforms die in staat zijn om te leren door te doen, iets ingewikkelds voor een goedkope robot, maar ook iets dat we constant zien in sociale netwerken, mobiele technologie en andere digitale omgevingen, ' zei Bernal-Lecina.
LoCoQuad, de spinachtigen-geïnspireerde, vierbenig robotplatform gemaakt door Bernal-Lecina en Civera, heeft opmerkelijk lage hardwarekosten (variërend tussen $ 150 en $ 165 USD), en kon dus gemakkelijk op grote schaal worden vervaardigd. Hoewel het misschien niet de meest efficiënte viervoeter is die tot nu toe is ontwikkeld, zijn lage productiekosten, het feit dat het open source is, zeer configureerbaar en gebruiksvriendelijk, maken het een veelbelovend platform voor zowel onderzoek als onderwijs.
"Ik praat altijd graag over LoCoQuad als een robotplatform dat bijna alles kan, "Zei Bernal-Lecina. "Maar om realistisch en een beetje rationeler te zijn, LoCoQuad is een doos met vier poten, volledig open-source en voor algemene doeleinden, met de flexibiliteit om een breed scala aan algoritmen te implementeren, variërend van gedrag dat relevant is voor het basisonderwijs tot de vooruitgang van state-of-the-art op de hoogste onderwijsniveaus."
Als onderdeel van hun studie hebben Bernal-Lecina en Civera hebben de effectiviteit van LoCoQuad aangetoond in een reeks experimenten. Ze ontdekten dat de robot verschillende basistaken kon uitvoeren, wat suggereert dat het een geweldig platform is om versterkingsleren en andere algoritmen voor machine learning te testen.
"Het idee om betaalbare robots op de markt te brengen, ligt in de vaardigheden die deze robots kunnen hebben, "Zei Bernal-Lecina. "We hebben geen dommere robots nodig, we hebben er al genoeg, en we weten hoe we ze moeten gebruiken. We hebben slimme en autonome robots nodig, zodat we ons er geen zorgen over hoeven te maken. Ik geloof dat robots moeten, in feite, zorg voor ons."
Machine learning technieken, zoals versterkende leermodellen, spelen nu een cruciale rol in de ontwikkeling van slimme en efficiënte robots. LoCoQuad, het goedkope robotplatform bedacht door Bernal Lecina en Civera, kan worden gebruikt om een aantal van deze technieken te testen en manieren te identificeren waarop ze kunnen worden verbeterd.
"LoCoQuad is nog maar een stukje van de puzzel, " legde Bernal Lecina uit. "Het stelt ons in staat om aan te tonen dat zelfs onhandige, goedkope en eenvoudige robots kunnen worden aangeleerd (of zelf leren) om elementaire en complexe taken uit te voeren. LoCoQuad brengt een nieuw alternatief om te verifiëren dat de volgende grote mijlpaal op het gebied van robotica mogelijk is."
Bernal Lecina en Civera zijn LoCoQuad al in andere onderzoeken gaan gebruiken om algoritmen te vergelijken en de meest effectieve te identificeren. Het ontwerp van LoCoQuad en de software die nodig is om het te implementeren, zijn online gepubliceerd en kunnen gratis worden gedownload op GitHub. De onderzoekers hopen dat andere teams wereldwijd hun software zullen downloaden en LoCoQuad gaan gebruiken om hun eigen machine learning-algoritmen te testen.
"We zullen blijven werken aan updates voor onze fantastische kleine robot, " Bernal Lecina zei. "Ons eerste doel is om de hersencapaciteiten te verbeteren om het platform interessanter te maken voor andere universiteiten en onderzoeksgroepen, zodat ze LoCoQuad als referentieplatform kunnen gaan gebruiken om hun algoritmen te testen en ook om op lager academisch niveau mobiele robotica te gaan aanleren met een robot voor elke leerling."
© 2020 Wetenschap X Netwerk
 Tweede cycloon in een week bedreigt Sri Lanka, India
Tweede cycloon in een week bedreigt Sri Lanka, India- Stijgende zeespiegels zullen in sommige gebieden tot matige overstromingen leiden, ernstige overstromingen in anderen
- Landen met de hoogste sterfte door vervuiling, sterftecijfers
- Niet te rechtvaardigen:nieuw rapport laat zien hoe de gasexpansie van de natie Australiërs in gevaar brengt
- NASA-afbeeldingen tonen daling van de vervuiling in China door het afsluiten van het virus
Hoofdlijnen
- Klasactiviteiten op het ademhalingssysteem
- Waarom is DNA de blauwdruk van het leven?
- Studie geeft inzicht in hoe algen kooldioxide uit de lucht zuigen
- Onderzoek onthult een nieuwe overlevingsstrategie in belangrijke bacteriën
- Hoe Royal Jelly wordt geoogst?
- Feiten over lipiden
- Hoe is DNA geordend om in een cel te passen?
- Bacteriën Levenscyclus
- "Recessive Allele: What is it?", 3, [[& Waarom gebeurt het? (met eigenschappenkaart)
- Kunstmatige intelligentie om de chemische fabrieken van de toekomst te runnen

- De nieuwste:klachten versus Google, Facebook onder nieuwe EU-wetgeving

- Democraten willen dat feds zich richten op de zwarte doos van AI-bias

- Canonical looft voor platform dat Android in de cloud zet

- Experimenten tonen een dramatische toename van de output van zonnecellen


 Ingenieurs ontdekken dat visualisatie van de slechte luchtkwaliteit in uw huis de vervuiling kan helpen verminderen
Ingenieurs ontdekken dat visualisatie van de slechte luchtkwaliteit in uw huis de vervuiling kan helpen verminderen- Nanoscopische gouden veren kunnen verwrongen moleculen ontrafelen
- De Beers gaat synthetische diamanten verkopen - zo worden ze gemaakt
- Het faillissement van Remington toont de diepte van de Amerikaanse wapencrisis (update)
- Ons onderzoek bracht twijfelachtige onderzoekspraktijken van ecologen en biologen aan het licht - dit is wat dat betekent
- Gebruik van teruggewonnen asfaltproducten
- Om de Amazone te beschermen, moet het beleid worden gewijzigd en moet minder rundvlees worden gegeten
- ESA en Chinese astronauten trainen samen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
