Wetenschap
Snakes helpen ingenieurs bij het ontwerpen van zoek- en reddingsrobots
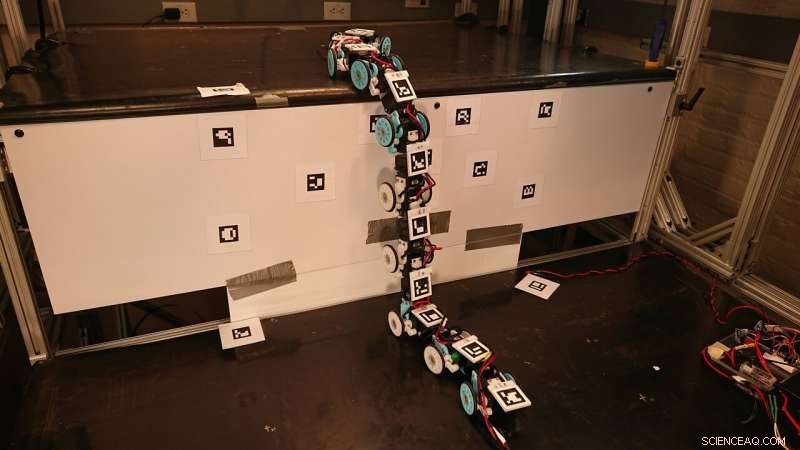
Het Terradynamics Lab van de Johns Hopkins University heeft deze slangenrobot gemaakt om zijn dierlijke tegenhanger na te bootsen. Krediet:JHU/Will Kirk
Slangen leven in diverse omgevingen, variërend van ondraaglijk hete woestijnen tot weelderige tropische bossen, waar ze in bomen schuiven, rotsen en struiken elke dag. Door te bestuderen hoe deze slangen bewegen, De ingenieurs van Johns Hopkins hebben een slangenrobot gemaakt die behendig en stabiel grote treden kan beklimmen.
De nieuwe bevindingen van het team, gepubliceerd in Tijdschrift voor Experimentele Biologie en Royal Society Open Science , de creatie van zoek- en reddingsrobots bevorderen die met succes door verraderlijk terrein kunnen navigeren.
"We kijken naar deze griezelige wezens voor bewegingsinspiratie, omdat ze al zo bedreven zijn in het stabiel schalen van obstakels in hun dagelijks leven. Hopelijk kan onze robot leren hoe te dobberen en te weven over oppervlakken, net als slangen, " zegt Chen Li, een assistent-professor werktuigbouwkunde aan de Johns Hopkins University en senior auteur van de papers.
Eerdere studies hadden voornamelijk slangenbewegingen waargenomen op vlakke oppervlakken, maar zelden in 3D-terrein behalve op bomen, zegt Li, en houd geen rekening met echte grote obstakels zoals puin en puin waar zoek- en reddingsrobots overheen zouden moeten klimmen.
Li's team bestudeerde eerst hoe de variabele koningsslang, een slang die algemeen voorkomt in zowel woestijnen als dennen-eikenbossen, trappen beklommen in Li's Terradynamics Lab. Li's lab versmelt de velden van robotica, biologie en natuurkunde samen om dierenbewegingen te bestuderen voor tips en trucs om meer veelzijdige robots te bouwen.
"Deze slangen moeten regelmatig over keien en omgevallen bomen reizen; ze zijn de meesters van beweging en er is veel dat we van ze kunnen leren, " zegt Li.
Li en zijn team voerden een reeks experimenten uit, het veranderen van de staphoogte en de oppervlaktewrijving van de treden om te zien hoe de slangen hun lichaam verwrongen als reactie op deze barrières.
Ze ontdekten dat slangen hun lichaam in drie delen verdeelden:hun voor- en achterlichaam kronkelden heen en weer op de horizontale treden als een golf, terwijl hun middelste lichaamsdeel stijf bleef, net zo zweven, om de grote stap te overbruggen. De kronkelende porties, ze merkten, zorgde voor stabiliteit om te voorkomen dat de slang kantelt.
Toen de slangen dichterbij en op de trede kwamen, de drie lichaamsdelen reisden door elk lichaamssegment. Naarmate meer en meer van de slang de trede bereikten, het voorste lichaamsgedeelte zou langer worden en het achterste gedeelte zou korter worden, terwijl het middelste lichaamsgedeelte ongeveer dezelfde lengte zou blijven, verticaal opgehangen boven de twee treden.
Als de treden hoger en gladder werden, de slangen zouden langzamer bewegen en hun voor- en achterlichaam minder kronkelen om de stabiliteit te behouden.
Na hun video's te hebben geanalyseerd en te hebben opgemerkt hoe slangen trappen in het laboratorium beklommen, Qiyuan Fu, een afgestudeerde student in Li's lab, creëerde een robot om de bewegingen van de dieren na te bootsen.
Aanvankelijk, de robotslang had moeite om stabiel te blijven op grote treden en wiebelde en kantelde vaak of kwam vast te zitten op de treden. Om deze problemen aan te pakken, de onderzoekers plaatsten een ophangsysteem (zoals dat in uw auto) in elk lichaamssegment zodat het indien nodig tegen het oppervlak kon drukken. Na dit, de slangenrobot was minder wiebelig, stabieler en beklommen treden tot 38% van zijn lichaamslengte met een slagingspercentage van bijna 100%.
Vergeleken met slangenrobots uit andere onderzoeken, Li's slangenrobot was sneller en stabieler dan op één na, en kwam zelfs dicht bij het nabootsen van de werkelijke snelheid van de slang. Een nadeel van het toegevoegde lichaamsophangingssysteem, echter, was de robot meer elektriciteit verbruikt.
"Het dier is nog veel superieur, maar deze resultaten zijn veelbelovend voor robots die over grote obstakels kunnen reizen, " voegt Li toe.
Volgende, het team zal de slangenrobot testen en verbeteren voor nog complexer 3D-terrein met meer ongestructureerde grote obstakels.
 Waterbeheer ondersteund door wiskundig model van zoetwaterlenzen
Waterbeheer ondersteund door wiskundig model van zoetwaterlenzen- Indonesië stuurt honderden zeecontainers vol afval terug
- Overstromingen langs de kust van Bay Area veroorzaken regionale verstoringen van woon-werkverkeer
- Kenmerken van Slakken en Slakken
- Onderzoek schetst de effecten van klimaatopwarming op microbiële netwerkinteracties
Hoofdlijnen
- Hoe een onbekende bacterie te identificeren in de microbiologie
- Studie identificeert walvisblaasmicrobioom
- Het zien van voedsel kan vissen naar het land hebben gelokt
- Wat gebeurt er met cellen als gevolg van een natriumonbalans?
- Studie van gierende kraanvogels onthult een band tussen paren zelfs voordat ze de paringsleeftijd hebben bereikt
- Septate vs. Non-Septate Hyphae
- Twin Monkeys voor het eerst gekloond als Dolly the Sheep
- Losse huid en slap volume beschermen Hagfish tegen haaienbeten
- Afval van tarwestro kan basis zijn voor groenere chemicaliën
- Wegversperring voor Uber-Grab-deal in Singapore

- Het buigen van een organische halfgeleider kan de elektrische stroom stimuleren

- Voertuigemissies:nieuwe sensortechnologie om de luchtkwaliteit in steden te verbeteren

- Een taalgeneratiesysteem dat creatieve poëzie kan componeren

- Gas versus elektrisch? Brandstofkeuze beïnvloedt inspanningen om energiezuinige en energiezuinige woningen te realiseren


 Hawaii heeft naast Kilauea nog 5 andere actieve vulkanen
Hawaii heeft naast Kilauea nog 5 andere actieve vulkanen- De voordelen van een verbrandingsinstallatie voor vast afval
- Hoe steenslag kan helpen kooldioxide op te vangen
- Zuckerberg, Chan geeft $30 miljoen aan Harvard en MIT voor alfabetisering
- Een magnetische methode om het transport van chirale Majorana-fermionen te regelen
- Lockdown 3:Strengere regels kunnen ertoe leiden dat meer kwetsbare mensen vermist raken
- Recorddroogte verhoogt de angst voor droogte in Californië
- Schadelijke nanotechnologie:nanomaterialen op waterbasis bevorderen genoverdracht tegen meerdere geneesmiddelen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
