Wetenschap
Drones leveren internetconnectiviteit
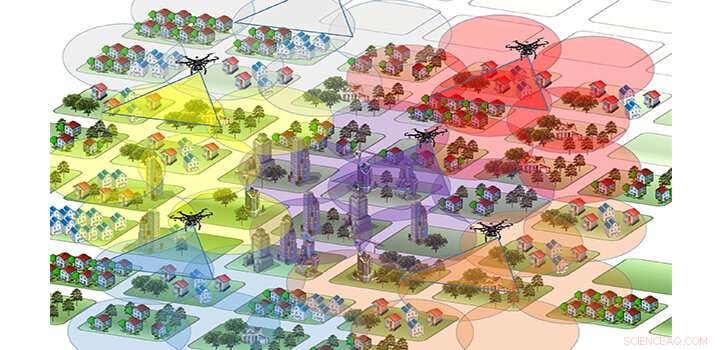
Zwevende voertuigen in de lucht kunnen slimme sensoren verbinden met het internet der dingen. Krediet:Osama Bushnaq
Zwevende voertuigen in de lucht kunnen slimme sensoren verbinden met het internet der dingen.
Drones kunnen de sleutel zijn om grote aantallen slimme objecten met elkaar te verbinden om het internet der dingen (IoT) te creëren. KAUST-onderzoekers hebben aangetoond dat het gebruik van drones, ook bekend als onbemande luchtvaartuigen (UAV's), vliegen tussen clusters van IoT-objecten om hun gegevens te verzamelen, kan zeer efficiënt zijn.
"IoT-netwerken zullen een revolutie teweegbrengen in de manier waarop we monitoren, controleren en communiceren met alles om ons heen, " zegt Osama Bushnaq, een doctoraat student in het laboratorium van Tareq Al Naffouri. Akkers kunnen worden gevuld met sensoren die het water- en nutriëntenniveau bewaken. Netwerken van sensoren die dieren in het wild detecteren, kunnen ook worden ingezet.
"Om IoT-netwerken mogelijk te maken, een groot aantal goedkope, zelfaangedreven sensoren nodig zijn, ", zegt Bushnaq. Traditionele draadloze gegevensoverdracht is voor dit doel niet geschikt vanwege de beperkte stroomvoorziening van elke sensor en de complexiteit van het aansluiten van zoveel apparaten.
UAV's verzenden om gegevens te verzamelen via low-power, korteafstandstransmissie zou een alternatief kunnen zijn, het overbrengen van de last van gegevensaggregatie van elke afzonderlijke sensor naar een enkele machine die autonoom kan terugkeren naar de basis om op te laden. De uitdaging ligt in het berekenen van de meest efficiënte benadering van gegevensverzameling om de missietijd te minimaliseren en de productiviteit te maximaliseren.
Stel je een veld voor dat willekeurig bedekt is met IoT-sensoren, zegt Bushnaq. "Het bestrijken van een klein gebied van het veld op elke zwevende locatie verbetert de communicatie tussen de UAV en de apparaten, het verminderen van de data-aggregatietijd, " legt hij uit. Echter, de UAV moet meer tijd besteden aan reizen tussen alle IoT-apparaten in het veld. Het minimaliseren van de totale missietijd omvat het optimaliseren van het UAV-dekkingsgebied, het aantal en de locatie van zweeflocaties, en het pad van de UAV tussen elke locatie.
Het team splitste het probleem op in onderdelen. Voor een bepaald aantal zwevende locaties, het team berekende eerst waar de optimale zweeflocaties zouden zijn. Vervolgens pasten ze het klassieke computerwetenschappelijke probleem van de reizende verkoper toe om de beste route tussen locaties te identificeren en de gegevensoverdrachtsnelheid te optimaliseren. "Het proces wordt herhaald voor verschillende aantallen zweeflocaties totdat een optimale afweging tussen zweef- en reistijden is verkregen, ", zegt Bushnaq. De aanpak verkortte de missietijd tot 10 keer voor een veld van 100 vierkante meter.
Het team test momenteel het idee om UAV's met IoT-sensoren te gebruiken voor branddetectie. "We onderzoeken hoe een dergelijk systeem kan worden gebruikt voor bosbranddetectie en de afweging tussen systeemkosten en betrouwbaarheid van branddetectie. ' Zegt Al Naffouri.
 Germanium belooft betere opto-elektronische eigenschappen dan tin voor kesterite-zonnecellen
Germanium belooft betere opto-elektronische eigenschappen dan tin voor kesterite-zonnecellen- Wat zijn de kleinste deeltjes van een element?
- Nieuwe methode verbetert de productie van biowaterstof en andere biochemicaliën aanzienlijk
- schoner, sterker, harder:Nieuwe technologie verbetert duurzaam beton
- Zwart silicium kan helpen bij het opsporen van explosieven
- Potentieel voor Saoedi-Arabische koraalriffen om te schitteren
- Onderzoekers halen de stank uit afvalwaterzuivering
- Het fenomeen van de opwarming van de aarde verklaren
- Toenemende trends van warme en natte extremen vertraagden in China tijdens de recente onderbreking van de opwarming van de aarde
- Kleine micro-omgevingen in de oceaan bevatten aanwijzingen voor de wereldwijde stikstofcyclus
Hoofdlijnen
- Planten combineren kleur en geur om bestuivers te verkrijgen
- Sluwe kraaien weten wat er nodig is om een goed stuk gereedschap te maken
- Geowetenschappers vergelijken micro-organismen in de poolgebieden
- Genoom van flespompoen geeft inzicht in evolutionaire geschiedenis, relaties van komkommerachtigen
- Voors en tegens van Forensic Science
- Bootverkeer bedreigt het voortbestaan van de Bocas Del Toro-dolfijnen in Panama
- De allereerste tagging van Amazone-dolfijnen om de inspanningen voor natuurbehoud te stimuleren
- Structurele kenmerken van blauwgroene algen
- DNA Extraction by Spooling Method
- Nano-elektroden registreren duizenden verbonden zoogdierneuronen van binnenuit

- Kunstmatige intelligentie zal de werkplek zowel verstoren als ten goede komen, geleerde zegt:

- Facebook-deals met Chinees bedrijf trekken woede van Amerikaanse wetgevers

- Jaarlijkse nettowinst Toyota daalt met kwart

- Opneembare bacteriën op een chip kunnen helpen bij het diagnosticeren van ziekte


 Lijkt het menselijk brein op het heelal?
Lijkt het menselijk brein op het heelal?- Air France-KLM verdubbelt winst in 2018 ondanks stakingen
- Senatoren onderzoeken het opstarten van web-scraping gezichtsherkenning
- Onderzoek bevestigt dat creativiteit de sleutel is voor zowel kunst als wetenschap
- Waarom Instagram je mentale gezondheid kan beïnvloeden (en wat je eraan kunt doen)
- Britse autoproductie crasht door door Brexit veroorzaakte shutdowns
- Gebruik van titratie
- Het toevoegen van vreemde atomen aan grafeen versterkt de eigenschappen ervan
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
