Wetenschap
Zelfrijdende microrobots
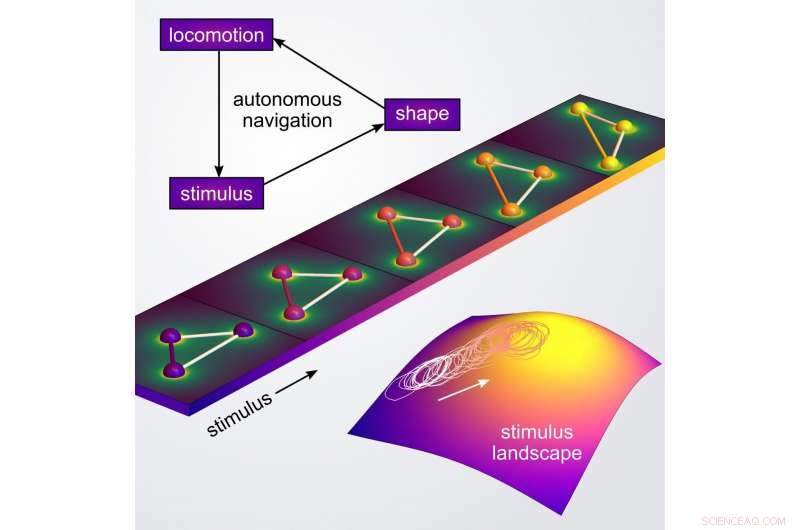
Een schema van autonoom navigatiemechanisme via shapeshifting Credit:Yong Dou/Columbia Engineering
De meeste synthetische materialen, inclusief die in batterijelektroden, polymeer membranen, en katalysatoren, degraderen na verloop van tijd omdat ze geen interne reparatiemechanismen hebben. Als je autonome microrobots binnen deze materialen zou kunnen verspreiden, dan zou je de microrobots kunnen gebruiken om continu van binnenuit reparaties uit te voeren. Een nieuwe studie van het lab van Kyle Bishop, universitair hoofddocent chemische technologie, stelt een strategie voor voor microschaalrobots die symptomen van een materiaaldefect kunnen detecteren en autonoom naar de plaats van het defect kunnen navigeren, waar corrigerende maatregelen kunnen worden genomen. De studie is gepubliceerd in Fysiek beoordelingsonderzoek 2 december 2019.
Zwembacteriën zoeken naar gebieden met een hoge nutriëntenconcentratie door chemische sensoren en moleculaire motoren te integreren. net als een zelfrijdende auto die informatie van camera's en andere sensoren gebruikt om de juiste actie te selecteren om zijn bestemming te bereiken. Onderzoekers hebben geprobeerd dit gedrag na te bootsen door kleine deeltjes te gebruiken die worden aangedreven door chemische brandstoffen of andere energie-inputs. Terwijl ruimtelijke variaties in de omgeving (bijv. in de brandstofconcentratie) kunnen werken om het deeltje fysiek te oriënteren en daardoor zijn beweging te sturen, dit type navigatie heeft beperkingen.
"Bestaande zelfrijdende deeltjes zijn meer een op hol geslagen trein die mechanisch wordt bestuurd door de kronkelende rails dan een zelfrijdende auto die autonoom wordt geleid door zintuiglijke informatie, " zegt Bishop. "We vroegen ons af of we robots op microschaal konden ontwerpen met materiële sensoren en actuatoren die meer als bacteriën navigeren."
Het team van Bishop ontwikkelt een nieuwe benadering om de autonome navigatie van microrobots te coderen die is gebaseerd op vormveranderende materialen. Lokale kenmerken van de omgeving, zoals temperatuur of pH, de driedimensionale vorm van het deeltje bepalen, die op zijn beurt zijn zelfrijdende beweging beïnvloedt. Door de vorm van het deeltje en zijn reactie op omgevingsveranderingen te controleren, de onderzoekers modelleren hoe microrobots kunnen worden ontworpen om stimulusgradiënten op of neer te zwemmen, zelfs degenen die te zwak zijn om direct door het deeltje te worden gevoeld.
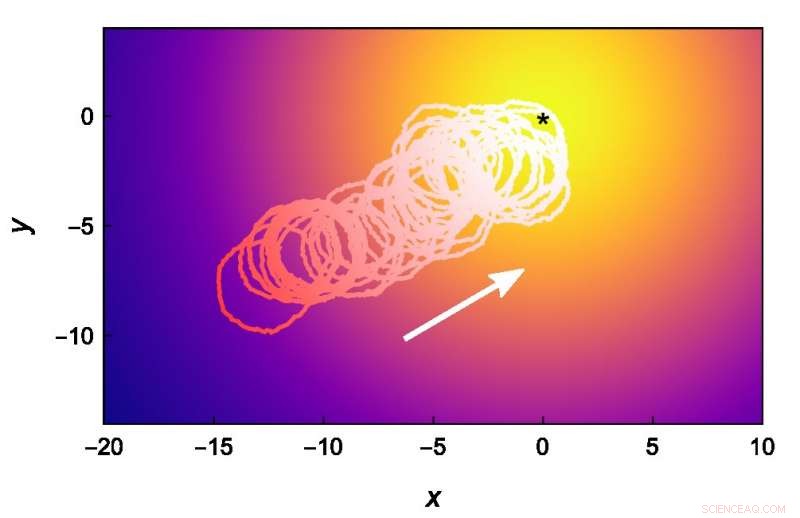
Gesimuleerd navigatietraject in lawaai en complexe omgevingen. Krediet:Yong Dou/Columbia Engineering
"Voor de eerste keer, laten we zien hoe responsieve materialen kunnen worden gebruikt als boordcomputers voor microschaalrobots, kleiner dan de dikte van een mensenhaar, die zijn geprogrammeerd om autonoom te navigeren, " zegt Yong Dou, een co-auteur van de studie en een Ph.D. student in Bishop's lab. "Dergelijke microrobots zouden complexere taken kunnen uitvoeren, zoals gedistribueerde detectie van materiaaldefecten, autonome levering van therapeutische lading, en on-demand reparaties van materialen, cellen, of weefsels."
Het team van Bishop zet nu experimenten op om hun theoretische navigatiestrategie voor microrobots in de praktijk te demonstreren, met behulp van vormveranderende materialen zoals vloeibaar-kristalelastomeren en legeringen met vormgeheugen. Ze verwachten dat de experimenten zullen bewijzen dat stimuli-responsieve, vormveranderende microdeeltjes kunnen technische feedback tussen detectie en beweging gebruiken om autonoom te navigeren.
 Op weg naar een ziektesnuivend apparaat dat wedijvert met de neus van een hond
Op weg naar een ziektesnuivend apparaat dat wedijvert met de neus van een hond- Synthetische routes veranderen planten in biofabrieken voor nieuwe moleculen
- Eiwitporiën verpakt in polymeren maken superefficiënte filtratiemembranen
- Natuurkundigen ontwikkelen nieuw materiaal voor ontzilting van water
- Wat meet ionisatie-energie?
- Brand in Californië leidt tot evacuaties; Oregon blaze ballonnen
- Bedrijf schetst stappen om ammoniakemissies te verminderen
- Vergelijking van klimaatsimulaties met proxies suggereert dat Arctisch zee-ijs in de zomer eerder dan verwacht zou kunnen verdwijnen
- Afbeelding:Reykjavik, IJsland
- Britse stad waar Romeinen baadden bestraft vervuilende auto's
Hoofdlijnen
- Wat is interfase, metafase en anafase?
- Studie beantwoordt een al lang bestaand mysterie over slangenpredatie
- Maak kennis met de kleine machines in cellen die virussen afslachten
- Waarom is chemie belangrijk voor de studie van anatomie en fysiologie?
- Hersenonderzoek onthult hoe insecten de weg naar huis vinden
- Nieuwe gorilla in Audubon Zoo mag nog even binnen blijven
- Eksters kunnen vriendschappen sluiten met mensen - dit is hoe
- Het leefgebied van de panda krimpt, steeds meer gefragmenteerd worden
- Wat zijn de twee hoofdfasen van de celcyclus?
- iPhone- en Android-gebruikers krijgen in 2020 117 nieuwe emoji

- Amazon blokkeert Australië van wereldwijde sites vanwege belasting

- Total start productie bij Franse biobrandstofraffinaderij

- Robopets:het gebruik van technologie om oudere volwassenen te monitoren roept privacyproblemen op

- sneller, schoner, goedkopere methode van stomerij


 Verpakking gemaakt van bananenplanten een alternatief voor de schil
Verpakking gemaakt van bananenplanten een alternatief voor de schil- IBM kondigt aan dat zijn System Q One-kwantumcomputer zijn hoogste kwantumvolume tot nu toe heeft bereikt
- Mauritius roept noodtoestand uit omdat gestrand schip brandstof morst
- De effecten van waterverontreiniging op de groei van planten
- Hoe koffieprinters werken
- Hoe gierst de Mongoolse rijken in stand hield?
- Mars Reconnaissance Orbiter bereidt zich voor op de komende jaren
- Kunstmatige intelligentie om eiwitstructuur te voorspellen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
