Wetenschap
Tweebenige robot bootst het menselijk evenwicht na tijdens het rennen en springen
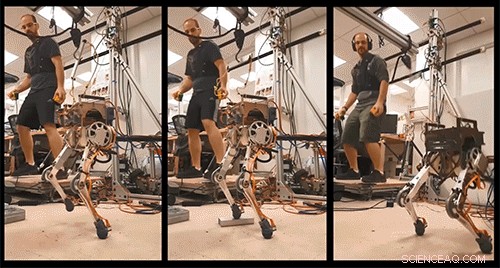
Joao Ramos teleopereert Little HERMES, een tweevoetige robot die het evenwicht van een operator kan nabootsen om rechtop te blijven tijdens het rennen, wandelen, en op zijn plaats springen. Krediet:Joao Ramos en Sangbae Kim
Slachtoffers redden uit een brandend gebouw, een chemische lekkage, of een ramp die onbereikbaar is voor menselijke hulpverleners, zou op een dag een missie kunnen zijn voor veerkrachtige, aanpasbare robots. Stel je voor, bijvoorbeeld, reddingsbots die op handen en voeten door het puin kunnen springen, sta dan op twee benen op om een zwaar obstakel opzij te duwen of door een gesloten deur te breken.
Ingenieurs boeken vooruitgang in het ontwerp van vierbenige robots en hun vermogen om te rennen, springen en zelfs backflips doen. Maar tweebenig worden, humanoïde robots om kracht uit te oefenen of ergens tegenaan te duwen zonder te vallen, was een belangrijk struikelblok.
Nu hebben ingenieurs van het MIT en de Universiteit van Illinois in Urbana-Champaign een methode ontwikkeld om het evenwicht in een tweebenige, telebediende robot - een essentiële stap om een mensachtige in staat te stellen high-impact taken uit te voeren in uitdagende omgevingen.
De robot van het team, fysiek lijkt op een machinaal bewerkte torso en twee benen, wordt op afstand bestuurd door een menselijke operator die een vest draagt dat informatie over de beweging van de mens en grondreactiekrachten naar de robot verzendt.
Door het vest, de menselijke operator kan zowel de voortbeweging van de robot sturen als de bewegingen van de robot voelen. Als de robot begint te kantelen, de mens voelt een overeenkomstige trekkracht aan het vest en kan zich aanpassen op een manier om zowel zichzelf als, synchroon, de robot.
In experimenten met de robot om deze nieuwe "balance feedback"-aanpak te testen, de onderzoekers waren in staat om op afstand het evenwicht van de robot te behouden terwijl hij sprong en synchroon liep met zijn menselijke operator.
"Het is als hardlopen met een zware rugzak - je kunt voelen hoe de dynamiek van de rugzak om je heen beweegt, en je kunt goed compenseren, " zegt Joaoo Ramos, die de aanpak als MIT-postdoc ontwikkelde. "Als je nu een zware deur wilt openen, de mens kan de robot opdracht geven om zijn lichaam naar de deur te gooien en open te duwen, zonder het evenwicht te verliezen."
Ramos, die nu een assistent-professor is aan de Universiteit van Illinois in Urbana-Champaign, heeft de aanpak gedetailleerd beschreven in een studie die verschijnt in Wetenschap Robotica . Zijn co-auteur van de studie is Sangbae Kim, universitair hoofddocent werktuigbouwkunde aan het MIT.
Meer dan beweging
Eerder, Kim en Ramos bouwden de tweebenige robot HERMES (voor Very Efficient Robotic Mechanisms and Electromechanical System) en ontwikkelden methoden om de bewegingen van een operator na te bootsen via teleoperatie, een benadering die volgens de onderzoekers bepaalde humanistische voordelen met zich meebrengt.
"Omdat je een persoon hebt die kan leren en zich snel kan aanpassen, een robot kan bewegingen uitvoeren die nog nooit eerder zijn beoefend [via teleoperatie], ' zegt Ramos.
Bij demonstraties, HERMES heeft koffie in een kopje gegoten, hanteerde een bijl om hout te hakken, en pakte een brandblusser om een brand te blussen.
Bij al deze taken zijn het bovenlichaam en de algoritmen van de robot betrokken om de positie van de ledematen van de robot af te stemmen op die van de operator. HERMES was in staat om krachtige bewegingen uit te voeren omdat de robot op zijn plaats was geworteld. Evenwicht, in deze gevallen, was veel eenvoudiger te onderhouden. Als de robot stappen zou moeten ondernemen, echter, het zou waarschijnlijk zijn omgevallen bij een poging om de bewegingen van de operator na te bootsen.
"We realiseerden ons dat om hoge krachten te genereren of zware voorwerpen te verplaatsen, alleen het kopiëren van bewegingen zou niet genoeg zijn, omdat de robot gemakkelijk zou vallen, " zegt Kim. "We moesten de dynamische balans van de operator kopiëren."
Kom binnen bij kleine HERMES, een miniatuurversie van HERMES die ongeveer een derde van de grootte van een gemiddelde menselijke volwassene is. Het team ontwierp de robot als eenvoudig een torso en twee benen, en het systeem speciaal ontworpen om taken in het onderlichaam te testen, zoals motoriek en evenwicht. Net als bij zijn tegenhanger voor het hele lichaam, Little HERMES is ontworpen voor teleoperatie, met een operator in een vest om de acties van de robot te controleren.
Voor de robot om de balans van de operator te kopiëren in plaats van alleen hun bewegingen, het team moest eerst een eenvoudige manier vinden om balans weer te geven. Ramos realiseerde zich uiteindelijk dat het evenwicht kan worden teruggebracht tot twee hoofdingrediënten:het zwaartepunt van een persoon en hun drukpunt - in feite, een punt op de grond waar een kracht wordt uitgeoefend die gelijk is aan alle ondersteunende krachten.
De locatie van het zwaartepunt ten opzichte van het drukpunt, Ramos gevonden, rechtstreeks verband houdt met hoe evenwichtig een persoon op een bepaald moment is. Hij ontdekte ook dat de positie van deze twee ingrediënten fysiek kon worden weergegeven als een omgekeerde slinger. Stel je voor dat je heen en weer zwaait terwijl je op dezelfde plek geworteld blijft. Het effect is vergelijkbaar met het zwaaien van een omgekeerde slinger, de bovenkant vertegenwoordigt het massamiddelpunt van een mens (meestal in de romp) en de onderkant vertegenwoordigt hun drukpunt op de grond.
Zwaar tillen
Om te definiëren hoe het zwaartepunt zich verhoudt tot het drukpunt, Ramos verzamelde gegevens over menselijke bewegingen, inclusief metingen in het laboratorium, waar hij heen en weer zwaaide, liep op zijn plaats, en sprong op een krachtplaat die de krachten mat die hij op de grond uitoefende, terwijl de positie van zijn voeten en romp werden geregistreerd. Vervolgens condenseerde hij deze gegevens in metingen van het zwaartepunt en het drukpunt, en een model ontwikkeld om elk in relatie tot elkaar weer te geven, als een omgekeerde slinger.
Vervolgens ontwikkelde hij een tweede model, vergelijkbaar met het model voor menselijk evenwicht, maar geschaald naar de afmetingen van de kleinere, lichtere robot, en hij ontwikkelde een besturingsalgoritme om feedback tussen de twee modellen te koppelen en mogelijk te maken.
De onderzoekers testten dit balansfeedbackmodel, eerst op een eenvoudige omgekeerde slinger die ze in het lab bouwden, in de vorm van een balk van ongeveer dezelfde hoogte als Little HERMES. Ze hebben de straal verbonden met hun teleoperatiesysteem, en het zwaaide heen en weer langs een baan als reactie op de bewegingen van een machinist. Terwijl de operator naar één kant zwaaide, de balk deed hetzelfde - een beweging die de operator ook door het vest kon voelen. Als de straal te ver zwaaide, de exploitant, de trek voelen, zou de andere kant op kunnen leunen om te compenseren, en houd de straal in evenwicht.
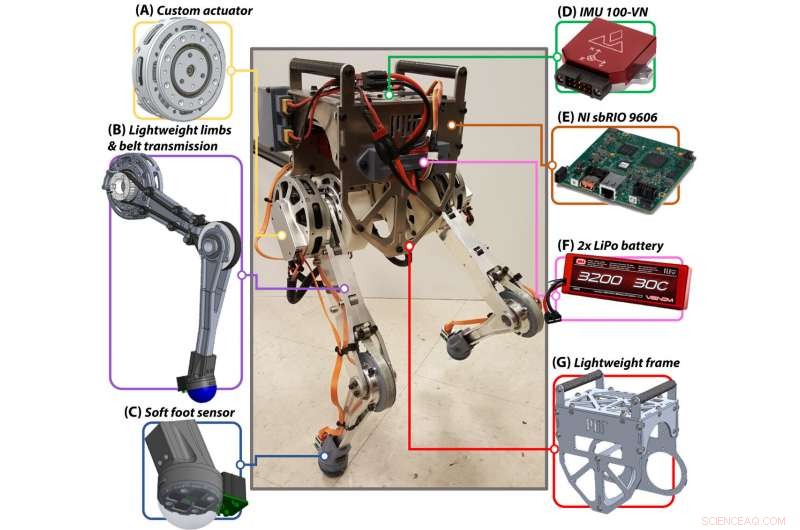
De tweevoetige robot Little HERMES. Krediet:Ramos en Kim, Wetenschap. Robot. 4, eaav4282 (2019)
De experimenten toonden aan dat het nieuwe feedbackmodel zou kunnen werken om het evenwicht op de balk te behouden, dus probeerden de onderzoekers het model vervolgens op Little HERMES. Ze ontwikkelden ook een algoritme voor de robot om het eenvoudige balansmodel automatisch te vertalen naar de krachten die elk van zijn voeten zou moeten genereren, om de voeten van de operator te kopiëren.
In het labortorium, Ramos ontdekte dat terwijl hij het vest droeg, hij kon niet alleen de bewegingen en het evenwicht van de robot besturen, maar hij kon ook de bewegingen van de robot voelen. Toen de robot vanuit verschillende richtingen met een hamer werd geraakt, Ramos voelde het vest rukken in de richting waarin de robot bewoog. Ramos verzette zich instinctief tegen de sleepboot, die de robot registreerde als een subtiele verschuiving in het zwaartepunt ten opzichte van het drukpunt, die het op zijn beurt nabootste. Het resultaat was dat de robot kon voorkomen dat hij omkantelde, zelfs temidden van herhaalde slagen op zijn lichaam.
Kleine HERMES deed Ramos ook na in andere oefeningen, inclusief rennen en springen op zijn plaats, en lopen op oneffen terrein, dit alles met behoud van het evenwicht zonder de hulp van koorden of steunen.
"Balansfeedback is moeilijk te definiëren omdat het iets is dat we doen zonder na te denken, " zegt Kim. "Dit is de eerste keer dat balansfeedback correct is gedefinieerd voor de dynamische acties. Dit zal de manier veranderen waarop we een op afstand bediende humanoïde besturen."
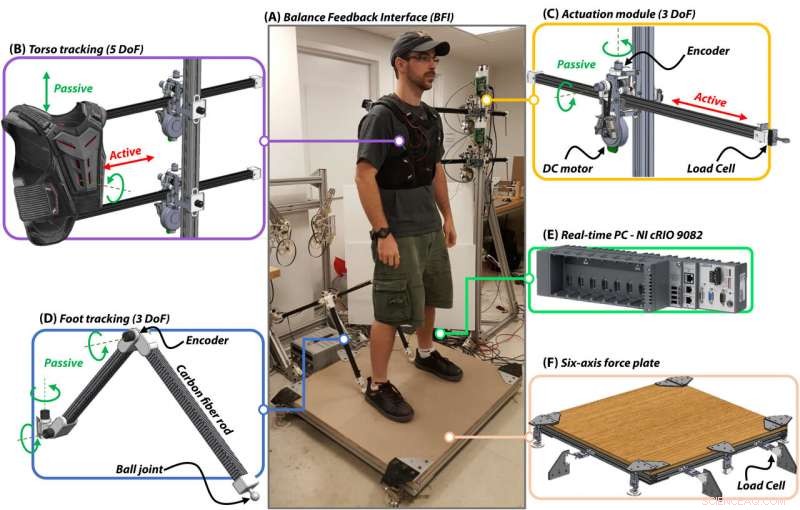
De teleoperatie-interface voor de menselijke operator. Krediet:Ramos en Kim, Wetenschap. Robot. 4, eaav4282 (2019)
Kim en Ramos zullen blijven werken aan de ontwikkeling van een mensachtige voor het hele lichaam met vergelijkbare balanscontrole, om op een dag door een rampgebied te galopperen en op te staan om barrières weg te duwen als onderdeel van reddings- of bergingsmissies.
"Nu kunnen we zware deuren openen of zware voorwerpen optillen of gooien, met de juiste balanscommunicatie, ' zegt Kim.
 Stormjagers eren Twister-ster met GPS-tribute
Stormjagers eren Twister-ster met GPS-tribute- Wat we kunnen leren van inheems landbeheer
- Nieuw geautomatiseerd vulkaanwaarschuwingssysteem voorspelt dreigende uitbarstingen
- Historisch klimaat belangrijk voor bodemreacties op toekomstige klimaatverandering
- Het wijnland van Californië staat voor een lange strijd als het vuur explodeert
Hoofdlijnen
- Mieren in het bladerdak van het Amazone-regenwoud hebben veel meer bacteriën in hun ingewanden dan grondbewoners
- Waarom blijven liedjes in mijn hoofd hangen?
- Hoe een eenvoudige microscoop te maken
- Structuur van primaire optogenetische tool onthuld
- Ideeën voor wetenschapsbeurzen Projecten met honden
- Deal verbiedt val in Colorado, bureau zegt dat het toch niet wordt gebruikt (update)
- Waarom heeft een regenworm een gesloten bloedsomloop?
- 5 manieren om optimistisch te blijven in een neergaande economie
- Soorten bacteriën in levensmiddelen
- Spoedig, luchtvervuiling kan op elke straathoek worden gemeten

- Internetgame Fortnite terug met een nieuw hoofdstuk

- Broadcom verlaagt bod op Qualcomm terwijl overnamesaga voortduurt

- 14 biedingen komen naar voren voor getroffen Franse luchtvaartmaatschappij, maar niet haalbaar

- Streamingdiensten concurreren in een afgesloten wereld


 Wat maakt de mens menselijk?
Wat maakt de mens menselijk? - Theoretische opbrengst berekenen in Moles & Grams
- Upgraded Deep Voice kan elke stem in slechts enkele seconden nabootsen
- Afbeelding:Elf op het ISS
- MoviePass maakt een breder aanbod voor filmavond
- Kubieke werven berekenen
- Verbeterde 3D-beeldvorming klaar om behandelingen voor hersenziekten te bevorderen
- RAS-verklaring over Starlink-satellietconstellatie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
