Wetenschap
Deze nieuwe zachte actuatoren kunnen zachte robots minder omvangrijk maken
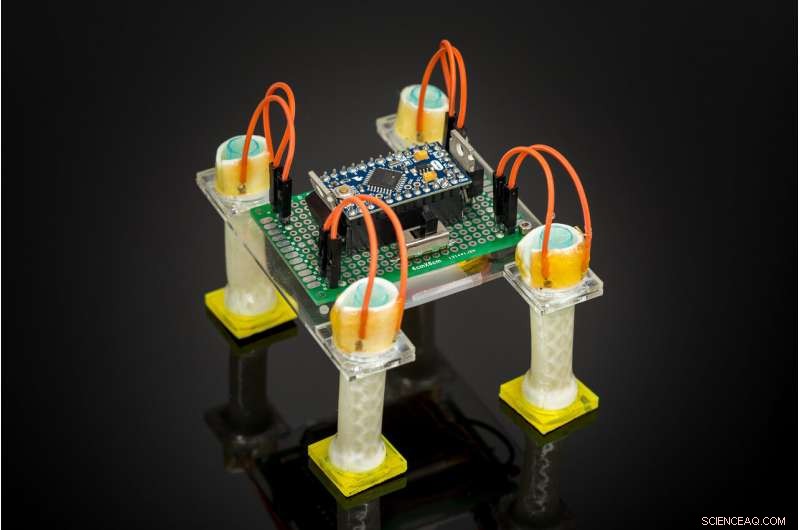
Elektrisch gestuurd, ongebonden zachte robot opgebouwd uit vier zachte buisvormige actuatoren, een microcontroller en batterij. De robot kan worden geprogrammeerd om te lopen of een object te dragen. Krediet:David Baillot / UC San Diego Jacobs School of Engineering
Ingenieurs van de Universiteit van Californië in San Diego hebben een manier ontwikkeld om zachte robots te bouwen die compact, draagbaar en multifunctioneel. De opmars werd mogelijk gemaakt door het creëren van zachte, buisvormige aandrijvingen waarvan de bewegingen elektrisch worden bestuurd, waardoor ze gemakkelijk te integreren zijn met kleine elektronische componenten.
Als proof-of-concept, ingenieurs gebruikten deze nieuwe actuatoren om een zachte, batterij-aangedreven robot die ongebonden op vlakke oppervlakken kan lopen en objecten kan verplaatsen. Ze bouwden ook een zachte grijper die kleine voorwerpen kan vastpakken en oppakken.
Het team, onder leiding van UC San Diego, professor mechanische en ruimtevaarttechniek Shengqiang Cai, publiceerde het werk 11 oktober in wetenschappelijke vooruitgang .
Een probleem met de meeste zachte actuatoren is dat ze worden geleverd met omvangrijke opstellingen. Dat komt omdat hun bewegingen worden gecontroleerd door lucht of vloeistoffen door kamers binnenin te pompen. Dus het bouwen van robots met dit soort actuatoren zou vereisen dat ze aan pompen worden vastgemaakt, grote stroombronnen en andere gespecialiseerde apparatuur.
In de huidige studie, De ingenieurs van UC San Diego hebben zachte actuatoren gemaakt die met elektriciteit worden aangestuurd. "Deze functie maakt onze buisvormige actuators compatibel met de meeste goedkope, in de handel verkrijgbare elektronische apparaten en batterijen, ' zei Cai.
De actuatoren zijn gemaakt van een soort materiaal dat wordt gebruikt voor kunstmatige spieren in robots, vloeibare kristalelastomeren genoemd. Ze zijn samengesteld uit vloeibaar-kristalmoleculen die zijn ingebed in een rekbaar polymeernetwerk. Het bijzondere aan deze materialen is dat ze van vorm veranderen, bewegen en samentrekken als reactie op stimuli zoals warmte of elektriciteit - vergelijkbaar met hoe spieren samentrekken als reactie op signalen van zenuwcellen.
Om elke actuator te construeren, ingenieurs hebben drie verwarmingsdraden ingeklemd tussen twee dunne films van vloeibaar kristalelastomeer. Het materiaal wordt vervolgens in een buis gerold, voorgerekt en blootgesteld aan UV-licht.
Elke verwarmingsdraad kan afzonderlijk worden bediend om de buis in zes verschillende richtingen te laten buigen. Wanneer een elektrische stroom door een of twee van de draden wordt geleid, het verwarmt een deel van de buis en laat het buigen in de richting van die draden. Wanneer een stroom door alle drie de draden wordt gestuurd, de hele buis contracteert, lengte inkorten. Wanneer de elektriciteit is uitgeschakeld, de buis koelt langzaam af en keert terug naar zijn oorspronkelijke vorm.

Elektrisch gestuurd, ongebonden zachte robot opgebouwd uit vier zachte buisvormige actuatoren, een microcontroller en batterij. De robot kan worden geprogrammeerd om te lopen of een object te dragen. Krediet:David Baillot / UC San Diego Jacobs School of Engineering
"Het gebruik van een extern aangelegd elektrisch potentiaal maakt het gemakkelijk om de positie van elke buisvormige actuator te programmeren, " zei eerste auteur Qiguang He, een mechanische en ruimtevaarttechniek Ph.D. student aan de UC San Diego Jacobs School of Engineering.
Door meerdere actuatoren te combineren, konden ingenieurs verschillende soorten zachte robots bouwen. Ze bouwden een ongebonden, lopende robot met vier actuatoren als poten. Deze robot wordt aangedreven door een kleine lithium/polymeer batterij aan boord. Ze bouwden ook een zachte grijper met drie actuatoren als vingers.
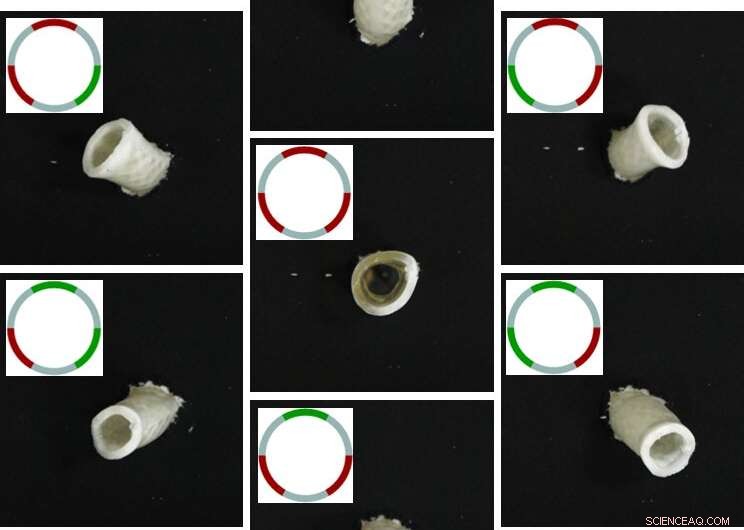
Afhankelijk van welke verwarmingsdraden elektrisch worden geactiveerd (rood), de zachte buisvormige actuator kan in zes verschillende richtingen buigen (buitenste afbeeldingen) en in lengte samentrekken (middenafbeelding). Krediet:Qiguang He
Elke robot heeft een ingebouwde microcontroller waarin ingenieurs een reeks elektrisch gestuurde bewegingen voor de actuatoren hebben geprogrammeerd. Hierdoor kunnen de robots zelfstandig bewegen.
Het team werkt nu aan het maken van zachte actuatoren die sneller kunnen bewegen. De huidige actuatoren hebben ongeveer 30 seconden nodig om volledig te buigen en samen te trekken, en tot vier minuten om terug te keren naar hun oorspronkelijke vorm. Het materiaal heeft namelijk wat tijd nodig om volledig op te warmen en af te koelen. Het uiteindelijke doel is om actuatoren te maken die net zo snel kunnen samentrekken en ontspannen als menselijke spieren, Hij zei.
 Ondanks hoge verwachtingen, de koolstof die wordt geabsorbeerd door het herstel van het Amazonewoud valt in het niet bij de uitstoot van ontbossing
Ondanks hoge verwachtingen, de koolstof die wordt geabsorbeerd door het herstel van het Amazonewoud valt in het niet bij de uitstoot van ontbossing- Kleine bossen zijn belangrijker dan eerder werd gedacht
- Milieuvriendelijke verzending helpt de vrachtkosten te verlagen
- Een model van een bloem maken met onderdelen
- Hoe rotsen op aarde roesten en rood werden
Hoofdlijnen
- Het weer in november is een lastige tijd voor schildpadden
- Wat is een gespecialiseerd gebied van het endoplasmatisch reticulum?
- Voordelen en nadelen van Hydrostatic Skeleton
- Wat veroorzaakt DNA-mutatie?
- Team onthult regels voor het maken van ribben
- Wat wordt het genoemd als bacteriën zich in twee cellen verdelen?
- Bedwantsen proberen in je vuile was te komen
- Wat zijn natuurlijke polymeren?
Enkele van de meest voorkomende voorbeelden van polymeren zijn kunststoffen en eiwitten. Hoewel plastics het resultaat zijn van het industriële proces, zijn eiwitten rijk aan aard en worden ze daarom meestal als een
- Hoe werkt een DP-cel?
- Samsung lanceert opvouwbare smartphone eerste 5G-handset (update)

- Facebook doodt trending topics, tests brekend nieuws label

- Het debuut van de kleine Raspberry Pi 4 markeert een grote upgrade

- Facebook heeft nieuwe tools tegen inmenging van EU-verkiezingen

- Problemen brouwen?:Brexit-uitdaging voor Guinness-toeleveringsketen


 Kunstmatige membraanbindende eiwitten om stamcellen naar het myocardium te leiden
Kunstmatige membraanbindende eiwitten om stamcellen naar het myocardium te leiden- Sociale media kunnen toeristen aanmoedigen om duurzamere keuzes te maken
- Demonstrator beheerst vluchtsequenties voor herbruikbare rakettrappen
- Aan de slag met het proton
- Video:Waarom je geen verse olijven kunt kopen
- Duitse nationalist wint gerechtelijk bevel tegen Facebook
- Regen helpt tegen monsterbranden in Spanje
- Nieuwe nanodeeltjes voorkomen stralingsschade tijdens kankertherapie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
