Wetenschap
Multifunctionele metalen ruggengraat voor origami-robotica
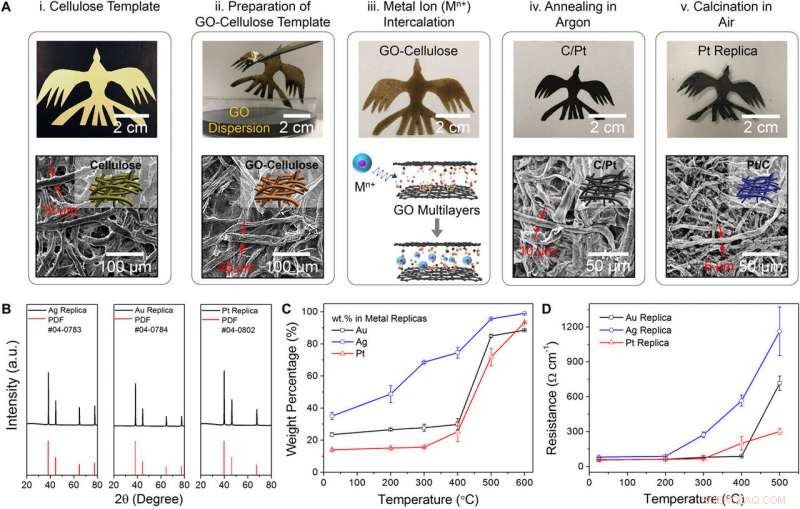
GO-enabled template-synthese van edelmetaalreplica's. (A) De GO-enabled template-synthese om cellulosepapier om te zetten in edelmetaalreplica's. De synthese van een feniks-vormige Pt-replica wordt gedemonstreerd. De SEM-afbeeldingen toonden aan dat de netwerkmorfologieën van cellulosepapier en GO-cellulosesjabloon erg op elkaar leken. De diameter van microvezels nam af van ~ 20 tot ~ 6 m na tweetraps gloeien / calcineren. (B) XRD (röntgendiffractie) spectra van gesynthetiseerde metalen replica's na tweetraps gloeien/calcineren. De spectra waren consistent met hun overeenkomstige "poederdiffractiebestanden (PDF)" van "gezamenlijke commissie voor poederdiffractienormen". (C) Gewichtspercentages van metallische inhoud in de sjabloonreplica's na het calcineren in lucht bij verschillende temperaturen. De gewichtspercentages worden bepaald door EDS-analyse (energiedispersieve röntgenspectroscopie). (D) Weerstand van metalen replica's met sjablonen (over 1 cm) na het calcineren in lucht bij verschillende temperaturen. De foutbalken geven de verschillen in metingen van vier monsters aan. Krediet:wetenschappelijke vooruitgang, doi:10.1126/scirobotics.aax7020.
Origami-robots kunnen worden gevormd door meerdere bedieningsfuncties nauw te integreren, voelen en communiceren. Maar de taak is uitdagend omdat conventionele materialen, waaronder plastic en papier die voor dergelijke robotontwerpen worden gebruikt, beperkingen opleggen om add-on-functionaliteiten te beperken. Om multifunctionaliteiten in het systeem te installeren, moeten wetenschappers doorgaans externe elektronica bevatten die het gewicht van de robot verhoogt. In een recente studie die nu is gepubliceerd op Wetenschap Robotica , Haitao Yang en collega's van de interdisciplinaire afdelingen Chemische en Biomoleculaire Engineering, Biomedical Engineering en Electrical and Computer Engineering in de VS en Singapore hebben een door grafeenoxide (GO) mogelijk gemaakt sjabloonsyntheseproces ontwikkeld om herconfigureerbare, compatibele en multifunctionele metalen backbones. De backbones vormden de basis voor origami-robots in combinatie met ingebouwde spanningsdetectie en draadloze communicatiemogelijkheden. Met behulp van de GO-methode, de onderzoekers vormden complexe origami's van edelmetaal als structurele replica's van papieren sjablonen.
Het onderzoeksteam zou platina-origami-structuren kunnen reproduceren die stabiel zijn gemaakt met dunne elastomeren om multifunctionele backbones te vormen om de nieuwe origami-robots te creëren. De nieuwe robots waren meer vervormbaar, brandvertragend en energiezuiniger dan die gebouwd met andere materialen. Yang et al. waargenomen toegevoegde mogelijkheden voor de nieuwe platina-robots (Pt-robots), waaronder on-demand resistieve verwarming, spanningsdetectie en ingebouwde antennes zonder externe elektronica. Voor extra mogelijkheden, ze omvatten het monitoren of opnemen van robotbewegingen in realtime, draadloze communicatie tussen robots, warmteregeling en magnetische controle. Het nieuwe werk verrijkte de materiaalbibliotheek van robotica om veelzijdige zachte robots te ontwikkelen.
Onderzoekers in robotica hadden eerder de oude Japanse kunst van origami verkend om kunstmatige spieren te ontwikkelen, zelfvouwende machines, lente-origami-systemen en robot-metamorfose. conventioneel, ze gebruikten cellulosepapier, polyester, polyetheretherketon en polytetrafluorethyleen om skeletten voor dergelijke uitvindingen te vervaardigen. Ondanks de aangeboden mechanische ondersteuning, papieren of plastic backbones misten functionaliteiten van responsiviteit van stimuli, detectie en draadloze communicatie. In plaats van externe apparatuur te installeren om dergelijke functionaliteiten te leveren, onderzoeksteams streven nu naar de ontwikkeling van multifunctionele zachte robotruggengraat voor nauwe integratie. Onderzoeksinspanningen hebben nog niet zulke prototypische zachte robots aangetoond met geleidende origami-ruggengraat met detectie- en communicatiepotentieel. Als resultaat, wetenschappers willen graag een nieuw fabricageschema ontwikkelen om mechanisch stabiele, zachte en geleidende robotruggengraat.
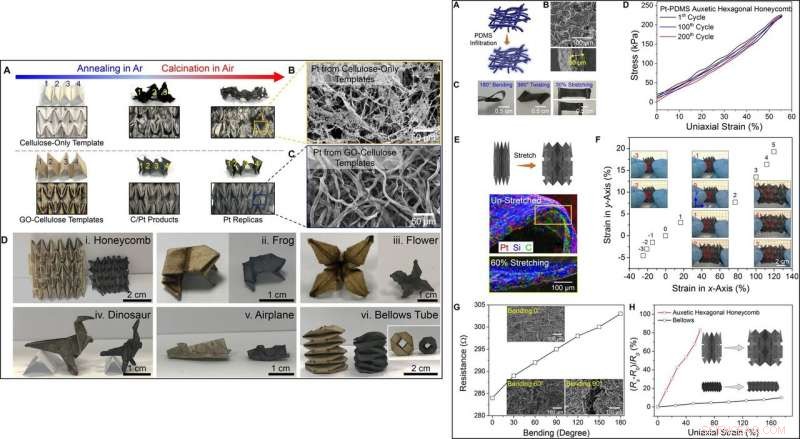
LINKS:Fabricage van metalen origami-structuren. (A) Foto's van de viervoudige en auxetische zeshoekige metalen origami-producten die zijn gesynthetiseerd uit alleen cellulose (bovenste rij) en GO-cellulose-sjablonen (onderste rij). Op Pt gebaseerde producten in verschillende gloei-/calcineringsstadia worden getoond. SEM-afbeeldingen van Pt-producten gesynthetiseerd uit (B) cellulose-only en (C) GO-cellulose-templates. (D) Foto's van GO-cellulose-origami en verkleinde Pt-origami-replica's met als sjabloon, inclusief (i) honingraat, (ii) kikker, (iii) bloem, (iv) dinosaurus, (v) vliegtuig, en (vi) balgbuis. RECHTS:Pt-origami-replica's veranderen in vervormbare Pt-elastomeer metamaterialen. (A) Infiltratie van verdunde elastomeervloeistof in Pt-replica's met sjabloon maakt de fabricage van Pt-elastomeer metamaterialen mogelijk. (B) Top-down en cross-sectionele SEM-beelden van Pt-elastomeer composiet. De dikte van Pt-elastomeercomposiet is ongeveer 90 m. (C) Grote vervormbaarheid van een vlakke Pt-elastomeer dunne film (180° buigen, 360° draaien, en 30% strekken). (D) Stress-strain curves van een Pt-elastomeer auxetic hexagonale origami tijdens de stabiliteitstest voor 200 cycli. (E) In situ SEM-beelden met EDS-toewijzing van een Pt-elastomeerplooi onder 90% uniaxiaal uitrekken. (F) De patronen van Pt-elastomeer auxetische hexagonale origami is spanningsafhankelijk tijdens de uniaxiale compressie (gemarkeerd met −1 tot −3) en rekprocessen (gemarkeerd met 1 tot 5). Het cijfer gemarkeerd met 0 vertegenwoordigde de begintoestand. (G) Weerstandsveranderingen van een vlakke Pt-elastomeerfilm onder buiging van 0° tot 180°. (H) Relatieve weerstandsveranderingen van auxetische hexagonale en balg Pt-elastomeer origamis onder verschillende uniaxiale spanningen. Rs is de weerstand van Pt-elastomeer origami onder uniaxiale spanningen; R0 is de weerstand van ongespannen Pt-elastomeer origami. Krediet:wetenschappelijke vooruitgang, doi:10.1126/scirobotics.aax7020.
Tijdens het fabricageproces, Yang et al. gebruikte grafeenoxide (GO) multilayers om verschillende metaalionprecursors te intercaleren, gevolgd door gloeien en calcineren bij hoge temperatuur om de hoogdimensionale GO-structuren te produceren. De metaaloxidereplica's bevatten microtexturen, vrijstaande strengen en complexe origami-structuren met uitstekende chemische controle en structurele replicatie. De voorgestelde GO-afgeleide methode zal een nieuw platform bieden om complexe metalen architecturen te produceren als multifunctionele backbones voor zachte robots.
Yang et al. zette de cellulosepapierfilms of origami-vormen om in een verscheidenheid aan metalen replica's met behulp van het GO-enabled sjabloonproces. Ze volgden vier hoofdstappen tijdens het fabricageproces, te beginnen met een sjabloon in de vorm van een feniks om edelmetaalzout te vormen (Mn + )-geïntercaleerde GO-cellulosecomplexen (M-GO-cellulose). De resulterende metalen replica's ondergingen tijdens de fabricage verdere gloei- en calcineringsprocessen en het onderzoeksteam controleerde ze door hun calcineringstemperatuur af te stemmen. De wetenschappers creëerden complexe metalen origami-structuren zoals zeshoekige honingraten, kikkers, bloemen, dinosaurussen, vliegtuigen en balgen door verschillende 3D-origamistructuren van cellulosepapier om te zetten in platinametaal.
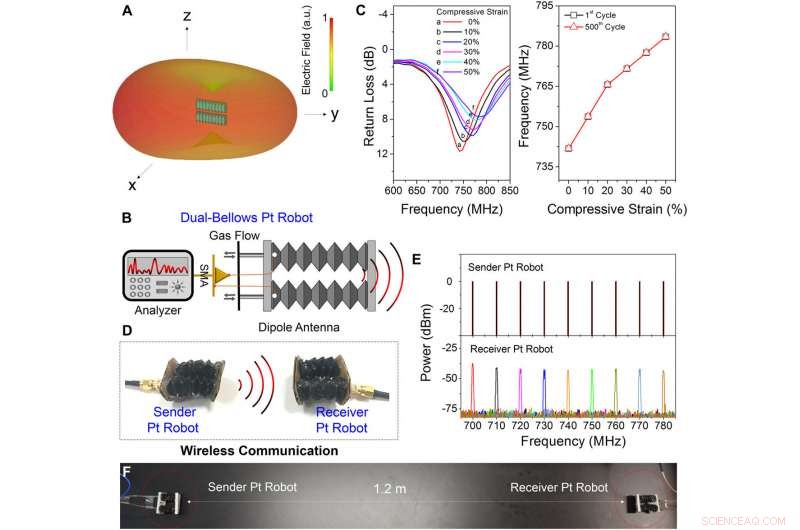
Origami Pt-robot met ingebouwde draadloze communicatiemogelijkheden. (A) gesimuleerde 3D-stralingspatronen voor twee Pt-elastomeer balgbuizen bij 741,8 MHz onder 0% spanning. (B) Schematische demonstratie van een Pt-robot met dubbele balg, die ook diende als een herconfigureerbare dipoolantenne. (C) Links:Retourverlies van de herconfigureerbare dipoolantenne onder verschillende drukspanningen van 0 tot 50%. Rechts:De resonantiefrequenties zijn een functie van compressieve spanningen voor en na 500-cyclus robotactiveringen. (D) Foto van een zender Pt-robot (signalen verzenden) (links) en een ontvanger Pt-robot (signalen ontvangen) (rechts). (E) De pulssignalen (de zender Pt-robot verzonden) werden goed ontvangen door de ontvanger Pt-robot. De frequentie van verzonden signalen was identiek aan de ontvangen signalen. (F) Twee Pt-robots konden op afstand communiceren over een afstand van 1,2 m. Krediet:wetenschappelijke vooruitgang, doi:10.1126/scirobotics.aax7020.
Om de mechanische stabiliteit te verbeteren, ze omvatten dunne elastomeren aan de metalen origami-structuren voor grote vervormbaarheid en omkeerbare herconfiguratie. Yang et al. koos voor platinametaal vanwege het efficiënte structurele behoud, hoge mechanische flexibiliteit en hoge elektrische geleidbaarheid in vergelijking met goud (Au) of zilver (Ag). Het team optimaliseerde de Pt-elastomeer ruggengraat voor hoge elektrische geleidbaarheid en mechanische flexibiliteit, voor de resulterende vlakke Pt-elastomeercomposiet om grote en herhaalde vervormingen te ondersteunen - ideaal voor zachte robotruggengraat. De herconfigureerbare metalen backbones introduceerden meerdere en verschillende functionaliteiten om metamateriaal origami-robots te vormen, inclusief intrinsiek potentieel voor brandwerendheid. Het onderzoeksteam heeft deze functie getest door Pt-robots direct contact te laten houden met een vlam voor langdurige blootstelling (800 0 C gedurende 30 seconden), ter vergelijking:een papieren robot ontstak in seconden (minder dan 5 seconden).
De Pt-elastomeer-ruggengraat was dunner en lichter dan de cellulosepapierrobots, maar bleef mechanisch stabiel tijdens omkeerbare robotbediening. De op papier gebaseerde robot vereiste grote drukveranderingen om te verlengen of samen te trekken; terwijl de Pt-robot alleen lagere drukveranderingen vereiste. Yang et al. ontwikkelde vervolgens de geleidende Pt-origami-robot om elektromagnetische (EM) golven te verzenden en te ontvangen en te dienen als een herconfigureerbare antenne voor draadloze communicatie. Voorafgaand aan de fabricage, het onderzoeksteam simuleerde 3D-stralingspatronen om het gebruik van Pt-robots als stralingsantennes te onderzoeken en maakte ze daarna. De wetenschappers toonden ook draadloze communicatie tussen twee Pt-robots die dienst deden als zender en ontvanger. Wanneer een zenderrobot pulssignalen op verschillende frequenties uitzond, de ontvangerrobot die op 1,2 m afstand was gestationeerd, ontving ze zonder frequentieafwijking tussen de verzonden en ontvangen signalen.
Vergelijking van de gasdruk tussen papier- en Pt-robots. Krediet:wetenschappelijke vooruitgang, doi:10.1126/scirobotics.aax7020.
Het team vergeleek vijf categorieën robotfuncties in het werk om technische voordelen aan te tonen van het gebruik van de GO-enabled Pt metalen backbones ten opzichte van (1) backbone-dichtheid, (2) mechanische stijfheid, (3) energie-efficiëntie, (4) spanningsdetectiemogelijkheden en (5) draadloze communicatiemogelijkheden. Het onderzoeksteam optimaliseerde de twee Pt-robots verder voor draadloze communicatie, waar een zenderrobot draadloos navigatie-instructies afleverde aan een ontvangerrobot om met succes een geconstrueerd obstakel te omzeilen door een begeleid pad te volgen.
Het team breidde vervolgens de toepassingen van het systeem uit met behulp van additieve 3D-productie, waar ze Pt-Go-cellulose-inkt combineerden met fused deposition modeling (FDM) tot 3D-geprinte metalen robotachtige ruggengraatgevormde vormen. Vervolgens, ze ontwierpen Pt-robots voor afstandsbediening met magnetische velden. Voor deze, Yang et al. synthetiseerde een Pt-replica met Pt-Go-cellulose-inkt en infiltreerde de polymeeroplossing met magnetische deeltjes om een magnetische Pt-ruggengraat te creëren. De nieuwe structuren bevatten de gebruikelijke ingebouwde spanningsdetectie en draadloze communicatiemogelijkheden, met toegevoegde magnetische beweging. De magnetische Pt-robots zouden een omkeerbare vorm en lichaamstransformatie kunnen ondergaan onder magnetische activering om vooruit te gaan in lijn met roterende magnetische velden.
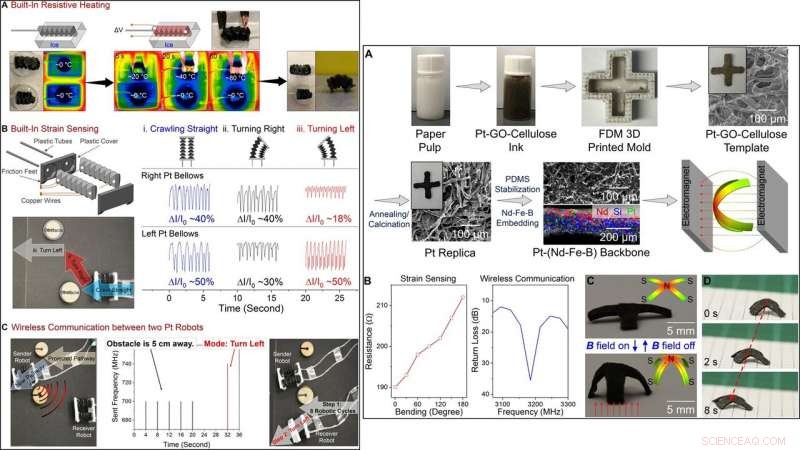
LINKS:Demonstraties van multifunctionele Pt-robots. (A) Pt-robot met één balg en ingebouwd weerstandsverwarmingsvermogen. Twee Pt-robots werden ingevroren in ijsblokjes. Onder een aangelegde spanning van 20 V, de bovenste Pt-robot werd snel verwarmd tot ca. 80°C in 60 s, ontsnapt uit het ijs, en bleef naar voren kruipen. (B) Dual-balg Pt-robot met ingebouwde spanningsdetectiemogelijkheid. De Pt-robotruggengraat was verbonden met koperdraden, en de verbinding werd gefixeerd met zilverpasta. Het voorgestelde pad voor de Pt-robot met dubbele balg omvatte (i) recht kruipen, (ii) rechts afslaan, en (iii) links afslaan. De robotactiveringen langs het hele pad werden gevolgd door de huidige profielen van linker en rechter Pt-balgbuizen te lezen. (C) draadloze communicatie tussen twee Pt-robots met dubbele balg. De zenderrobot werd geblokkeerd door een obstakel op het geprojecteerde pad en draaide naar links om het obstakel te omzeilen. De zenderrobot stuurde een reeks signalen naar de ontvangerrobot. De signalen werden vervolgens vertaald in de bewegende richtlijn voor de ontvangerrobot, waardoor de robot het voorgestelde pad kan nemen zonder het obstakel tegen te komen. RECHTS:Fabricage van magnetisch aangedreven Pt-robot via Pt-GO-cellulose-inkt. (A) Alternatieve fabricage van Pt-robots werd aangetoond door Pt-GO-cellulose-inkt te ontwikkelen en op te nemen met FDM 3D-printen. Na tweetraps gloeien/calcineren, PDMS-stabilisatie, en inbedding met Nd-Fe-B-deeltjes, een magnetisch aangedreven Pt-(Nd-Fe-B) tetrapod-robot werd gefabriceerd. (B) Ingebouwde spanningsdetectie en draadloze communicatiemogelijkheden van Pt-(Nd-Fe-B) tetrapod-robot. (C) Pt-(Nd-Fe-B) tetrapod-robot gebogen op en neer onder magnetische activeringen. (D) Pt-(Nd-Fe-B) tetrapod-robot bewoog naar voren door de banen van roterende magnetische velden te volgen. Krediet:wetenschappelijke vooruitgang, doi:10.1126/scirobotics.aax7020.
Op deze manier, Haitao Yang en collega's hebben een Go-enabled template-syntheseprotocol ontwikkeld om herconfigureerbare, compatibele en multifunctionele metalen backbones om metalen origami-robots te bouwen. De robots bevatten ingebouwde spanningsdetectie en draadloze communicatiemogelijkheden. De synthetische metalen ruggengraat gemaakt met complexe edele metalen, waaronder zilver, goud en platina waren sterk structurele replica's van hun papieren tegenhangers. In vergelijking met traditioneel papier en plastic, de herconfigureerbare Pt-elastomeer ruggengraat bood een laag gewicht, vervormbaarheid en energie-efficiëntie. Yang et al. denk aan praktische toepassingen voor metalen origami-robots, variërend van activiteiten in risicovolle omgevingen, voor gebruik in kunstmatige spieren en robotarmen, en als op afstand bestuurbare ongebonden robots. Ze zijn gericht op het optimaliseren van metalen backbones met elektrochemisch actieve materialen om vervolgens energieopslagapparaten te vormen. Dergelijke ontwikkelingen zullen de bibliotheek met robotmaterialen verrijken om diverse zachte robots met hoogfunctionele integratie te fabriceren.
© 2019 Wetenschap X Netwerk
 Biosynthese van wijdverspreide pigmenten van bacteriën onthuld
Biosynthese van wijdverspreide pigmenten van bacteriën onthuld- Video:Waar zijn eye crusties van gemaakt?
- Onderzoekers verminderen de tijd die nodig is voor 3D-printen van glas en keramiek sterk
- Sterke M-M Pauli-afstoting leidt tot weerzinwekkende metalophiliciteit
- Onderzoekers ontdekken dat zaadvliezen kunnen leiden tot sterke, moeilijk, maar toch flexibele materialen
- Alpine-brede studie toont aan dat de sneeuwbedekking is afgenomen
- Gigantische stofstorm in het Midden-Oosten veroorzaakt door een veranderend klimaat, geen menselijk conflict
- Multimodel-ensemblevoorspelling van zomerdroogten boven het Yellow River Basin
- Een systeem voor het delen van klimaat om een einde te maken aan de Australische stroomcrisis
- Angst voor bosbranden inspireert vooruitstrevende gemeenschappen
Hoofdlijnen
- Investeren in natuurbehoud loont, studie vondsten
- Als je asperges kunt ruiken in de urine,
- Fenotype: definitie, types, voorbeelden
- Genetische redding bevordert het herstel van de met uitsterven bedreigde Australische dwergbuidelmuizen
- Hoe werkt ureum denatureiwitten?
- Zorgen voor het voortbestaan van olifanten in Laos:een kwestie van economie
- Zijn mannen gewelddadiger dan vrouwen?
- Onverwachte regulatie van transcriptiefactoren die cruciaal zijn voor ontwikkeling
- Wat is de rol van glucose in cellulaire ademhaling?
- Hoe technologiebedrijven met succes terroristische activiteiten op sociale media verstoren

- Duitsland wil technologiebedrijven afschermen van buitenlandse overnames

- Tesla-CEO gaat gevaarlijke weg in op zoek naar winst

- Onderzoekers kwantificeren de impact van autonome voertuigen op het verkeer

- Een eenvoudig konijn bouwen Trap


 in Genève, nieuwe elektra, maar vergeet de pk's niet
in Genève, nieuwe elektra, maar vergeet de pk's niet- 1e privévluchtpassagier op de maan om creatieve gasten uit te nodigen
- Lucy in the sky:ruimtevaartuig bezoekt record 8 asteroïden
- Amerikaans, Russisch juichte toen ze het internationale ruimtestation bereiken
- Ultrapuur koper voor een ultragevoelige donkere-materiedetector
- Statusupdate:OSIRIS-REx Osprey Flyover
- Natuurkundigen onderzoeken een veilig alternatief voor röntgenbeveiligingsscanners
- CERN levert tweede DUNE-cryostaat
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
