Wetenschap
Een nieuwe robotkwal die in staat is om 3D-straalvoortstuwing en -manoeuvres uit te voeren
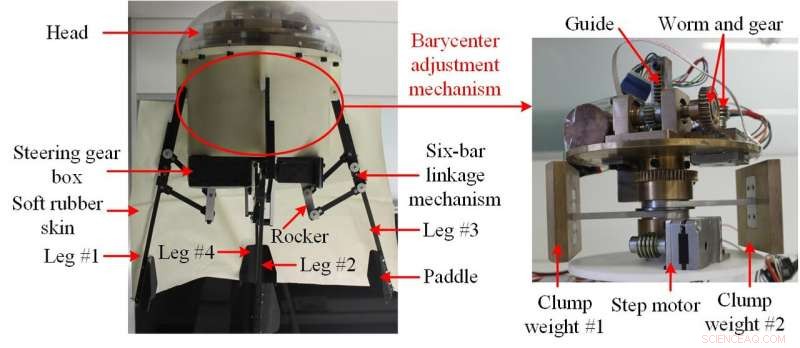
Het mechanische ontwerp van de robotkwal. Krediet:©Science China Press
Als inspiratiebron, waterdieren zoals vissen, walvisachtigen, en kwallen zouden kunnen inspireren tot innovatieve ontwerpen om de manieren te verbeteren waarop door de mens gemaakte systemen werken in en omgaan met aquatische omgevingen. Kwallen in de natuur stuwen zichzelf voort door hun omgeving door hun klokvormige lichamen radiaal uit te zetten en samen te trekken om water achter zich te duwen, die straalaandrijving wordt genoemd.
In tegenstelling tot de heersende opvatting dat kwallen worden beschreven als inefficiënte zwemmers, kwallen hebben bewezen een van de meest energetisch efficiënte zwemmers te zijn. Dat is, het is aangetoond dat zwemmen als een kwal een opmerkelijk voortstuwingsvoordeel zal hebben als voortstuwing met een laag energieverbruik vereist is. Daarom, de bewegingen van kwallen hebben het afgelopen decennium veel belangstelling getrokken in de context van bio-geïnspireerde onderwatervoertuigen.
Onlangs, onderzoekers van het Instituut voor Automatisering, Chinese Academie van Wetenschappen in Peking, China heeft met succes een nieuwe robotkwal ontwikkeld die in staat is om driedimensionale kwallenachtige voortstuwing en manoeuvres uit te voeren op basis van een op versterking gebaseerde leermethode.
Door de nieuwste ontwikkelingen in mechatronisch ontwerp te combineren, materialen, elektronica, en controlemethoden, onderzoekers doen een geïntegreerde inspanning om slimme actuatoren te ontwikkelen om verschillende robotkwallen te fabriceren. In het algemeen, dergelijke robotkwallen zijn vaak vastgebonden en veel langzamer in snelheid in vergelijking met het soort dat wordt aangedreven door conventionele elektromotoren. De meeste bestaande robotkwallen kunnen hun drie-assige houding niet vrij aanpassen, wat een nadelig effect heeft op vrijzwemmende voortstuwing en plausibele toepassingen.
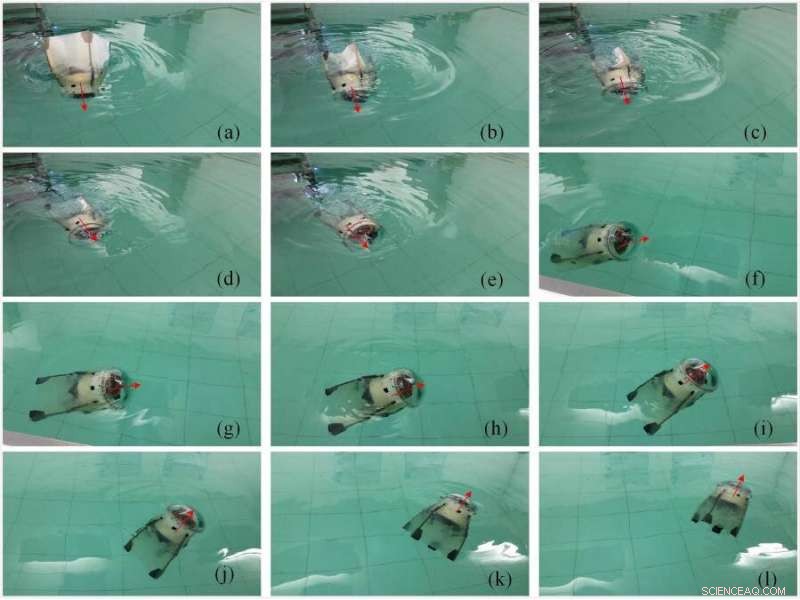
Snapshots van robotkwallen die een hybride beweging uitvoeren waarbij verticaal en horizontaal zwemmen wordt verweven. Krediet:©Science China Press
Om dit probleem op te lossen, de onderzoeksgroep onder leiding van Prof. Junzhi Yu van het Institute of Automation, Chinese Wetenschapsacademie, heeft onderzocht hoe een bio-geïnspireerd, door een motor aangedreven, kwallenachtig robotsysteem dat in staat is tot 3D-beweging, wordt ontworpen en bestuurd.
De ontworpen robotkwallen zijn gemodelleerd naar Aurelia aurita (gewoonlijk maankwallen genoemd), die een relatief grote cilinderinhoud heeft en vooral geschikt is voor gebruik met een groot laadvermogen. Hij is ongeveer 138 mm hoog en weegt ongeveer 8,2 kg. Zoals geïllustreerd in figuur 1, de robotkwal is halfrond van vorm en bestaat uit een klokvormige stijve kop, een cilindrische hoofdholte, vier afzonderlijke zes-bar verbindingsmechanismen, en een zachte rubberen huid. Om de manoeuvreerbaarheid van de robotkwal te verbeteren, een in de holte geassembleerd barycenter-aanpassingsmechanisme wordt geïntroduceerd. Door twee klompgewichten in verticale of horizontale richting of in een combinatie van beide te verstellen, houdingsregulatie wordt bereikt.
"Het is erg moeilijk om een nauwkeurig dynamisch model vast te stellen voor kwallenachtig zwemmen, aangezien het een zeer niet-lineaire, sterke koppeling, en tijdsafhankelijk systeem, " zei door Prof. Junzhi Yu. "Parametrische onzekerheden en externe verstoringen in dynamische aquatische omgevingen, tegelijkertijd, problemen veroorzaken bij het afleiden van controlewetten door het probleem van de inverse kinematica op te lossen. een op versterking gebaseerde, gesloten houdingscontrolemethode wordt voorgesteld voor de robotkwal, die een optimaal beslissingscontroleprobleem kan oplossen door directe interactie met de omgeving, vooral zonder de noodzaak van dynamische modellering.
Eindelijk, het voorstel van de bekrachtigingsleergebaseerde methode van houdingscontrole maakt autonome houdingsregulatie mogelijk. "In vergelijking met de meeste andere robotkwallen, de gebouwde robot vertoont een hoge mate van structuurflexibiliteit en giermanoeuvreerbaarheid, " Wijst Yu erop. Hij benadrukte ook dat deze zelfrijdende robotkwal met 3D-beweging grote implicaties heeft voor het bio-geïnspireerde ontwerp van een straalvoortstuwingssysteem met grote behendigheid.
 Modulerende spiraalvormige nanostructuren in vloeibare kristalfase door moleculair ontwerp
Modulerende spiraalvormige nanostructuren in vloeibare kristalfase door moleculair ontwerp- Waarom smelt zout sneller dan suiker?
- 3D-printen elektrisch ondersteund, op parelmoer geïnspireerde structuren met zelfgevoelige mogelijkheden
- Hoe polystyreenschuim te recycleren
- Organisch chemicus gebruikt klapvliegeieren als forensisch hulpmiddel
Hoofdlijnen
- Dode walvis verrast zwemmers op iconisch strand van Rio
- Onderzoeksthema's in de biotechnologie
- Welke functies delen mitochondria en bacteriën?
- Chinese wetenschappers onthullen een nieuwe signaalroute voor koude tolerantie in rijst
- Nieuwe high-throughput sequencing-technologieën onthullen een wereld van op elkaar inwerkende micro-organismen
- Symbiose en celevolutie:Lynn Margulis en de oorsprong van eukaryoten
- Meer dan een getallenspel:nieuwe techniek meet microbiële gemeenschappen op biomassa
- Noordelijke blootstelling:fossielen van een zuidelijke walvis voor het eerst gevonden in het noorden
- Nieuwsgierige grote witte haai speelt met camera
- Regeling van de kristalgrootte van organische halfgeleiders

- Wrak van Argentijnse onderzeeër gevonden jaar na verdwijning

- Trump 5G push kan voorspelling van dodelijke stormen belemmeren

- Pas op hoe je de huidige AI behandelt:het kan in de toekomst wraak nemen

- Zelfvernietigend gedrag:Burberry niet de enige


 De psychologie van rellen:waarom het nooit zomaar zinloos geweld is?
De psychologie van rellen:waarom het nooit zomaar zinloos geweld is?- Gozer, Dell gaat weer naar de beurs
- Wat zijn de voordelen en nadelen van Flow Cytometry?
- Wedloop naar overlevenden terwijl aardbeving gebouwen in Mexico-Stad plat maakt
- Wat zijn twee belangrijke kenmerken van een moleculaire verbinding?
- Smeltend stoffig ijs heeft mogelijk Martiaanse geulen uitgehouwen
- Onderzoekers ontwikkelen methode om prijsmodellen te vergelijken
- Hoe een seizoensgebonden snauw in het midden van de jaren 1500 ons onze vreemde regels voor schrikkeljaren gaf
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
