Wetenschap
Je kunt deze op kakkerlakken geïnspireerde robot niet pletten

Een nieuwe robot ter grootte van een insect, gemaakt door onderzoekers van de Universiteit van Californië, Berkeley, haast zich met de snelheid van een kakkerlak en kan het gewicht van een mens weerstaan. Credit:UC Berkeley-foto door Stephen McNally
Als de aanblik van een vliegende kever je doet kronkelen, je wilt misschien wegkijken - een nieuwe robot ter grootte van een insect, gemaakt door onderzoekers van de Universiteit van Californië, Berkeley, kan over de vloer rennen met bijna de snelheid van een vliegende kakkerlak.
En het is bijna net zo winterhard als een kakkerlak, te. Probeer deze robot onder je voet te pletten, en meer dan waarschijnlijk het zal gewoon doorgaan.
"De meeste robots op deze kleine schaal zijn erg kwetsbaar. Als je erop gaat staan, je vernietigt vrijwel de robot, " zei Liwei Lin, een professor werktuigbouwkunde aan UC Berkeley en senior auteur van een nieuwe studie die de robot beschrijft. "We ontdekten dat als we onze robot belasten, het functioneert nog steeds min of meer."
Klein, duurzame robots zoals deze kunnen voordelig zijn bij zoek- en reddingsmissies, knijpen en knijpen op plaatsen waar honden of mensen niet kunnen passen, of waar het voor hen te gevaarlijk kan zijn om te gaan.
"Bijvoorbeeld, als er een aardbeving plaatsvindt, het is erg moeilijk voor de grote machines, of de grote honden, om het leven onder puin te vinden, daarom hebben we een kleine robot nodig die wendbaar en robuust is, " zei Yichuan Wu, eerste auteur van het artikel, die het werk voltooide als afgestudeerde student in werktuigbouwkunde aan UC Berkeley via het partnerschap tussen Tsinghua-Berkeley Shenzhen Institute. Wu is nu een assistent-professor aan de University of Electronic Science and Technology of China.
Het onderzoek verschijnt vandaag (woensdag 31 juli) in het journaal Wetenschap Robotica .
De robot, die ongeveer zo groot is als een grote postzegel, is gemaakt van een dunne laag van een piëzo-elektrisch materiaal genaamd polyvinylideenfluoride, of PVDF. Piëzo-elektrische materialen zijn uniek, doordat het toepassen van elektrische spanning erop ervoor zorgt dat de materialen uitzetten of krimpen.
De onderzoekers bedekten de PVDF met een laag elastisch polymeer, waardoor het hele blad buigt, in plaats van uit te breiden of in te krimpen. Ze voegden toen een voorpoot toe zodat, als het materiaal buigt en recht wordt onder een elektrisch veld, de oscillaties stuwen het apparaat naar voren in een "springsprong" beweging.

De robot is gemaakt van een gelaagd materiaal dat buigt en recht maakt wanneer wisselspanning wordt toegepast, waardoor het naar voren springt in een "springende" beweging. Credit:UC Berkeley-foto door Stephen McNally
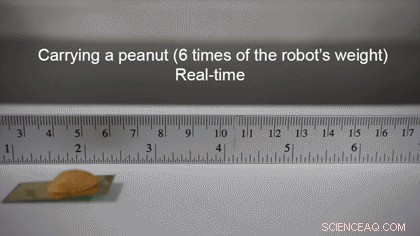
De resulterende robot kan eenvoudig zijn om naar te kijken, maar het heeft een aantal opmerkelijke vaardigheden. Het kan over de grond varen met een snelheid van 20 lichaamslengtes per seconde, een snelheid vergelijkbaar met die van een kakkerlak en naar verluidt het snelste tempo onder robots op insectenschaal. Het kan door buizen ritsen, kleine hellingen beklimmen en kleine lasten dragen, zoals een pinda.
Misschien wel het meest indrukwekkend, de robot, die minder dan een tiende van een gram weegt, kan een gewicht van ongeveer 60 kg weerstaan - ongeveer het gewicht van een gemiddelde mens - wat ongeveer 1 miljoen keer het gewicht van de robot is.
robuustheid, klimmen, en lasten dragen. Krediet:Wu et al., Wetenschap. Robot. 4, eaax1594 (2019)
“Dat hebben mensen misschien wel eens meegemaakt, als je op de kakkerlak stapt, misschien moet je het een beetje vermalen, anders kan de kakkerlak nog steeds overleven en wegrennen, "Zei Lin. "Iemand die op onze robot stapt, oefent een buitengewoon groot gewicht uit, maar [de robot] werkt nog steeds, het functioneert nog steeds. Dus, in die specifieke zin, het lijkt erg op een kakkerlak."
De robot is momenteel "vastgebonden" aan een dunne draad die een elektrische spanning draagt die de trillingen aandrijft. Het team experimenteert met het toevoegen van een batterij zodat de robot zelfstandig kan zwerven. Ze werken ook aan het toevoegen van gassensoren en verbeteren het ontwerp van de robot, zodat deze rond obstakels kan worden gestuurd.
 Seismische stresskaartprofielen veroorzaakten aardbevingsrisico voor West-Texas, New Mexico
Seismische stresskaartprofielen veroorzaakten aardbevingsrisico voor West-Texas, New Mexico- NASA ziet Pineapple Express zware regenval bezorgen, overstromingen naar Californië
- Brazilië zet leger in om ontbossing in Amazone tegen te gaan
- Door ijs geperste watervoerende lagen kunnen marsbevingen veroorzaken
- Studie in Ethiopië koppelt gezonde bodems aan voedzamere granen
Hoofdlijnen
- Door klimaat beïnvloede veranderingen in bloei, vruchtvorming heeft ook invloed op de vogelstand, activiteiten
- Wat wordt het genoemd als bacteriën zich in twee cellen verdelen?
- Wetenschappers controleren cellen met licht,
- Wat zijn de structurele delen van de lange botten in het lichaam?
- Veel retailers in het Midwesten verkopen verkeerd gelabelde invasieve wijnstokken
- Probeer deze 5 dagelijkse gewoonten om je leven dit jaar te verbeteren
- Puin van de tsunami van 2011 bracht honderden soorten over de Stille Oceaan
- Sterven mensen in politiehechtenis aan opgewonden delirium?
- Verschil tussen bacterie- en plantencel Wall
- Onbeveiligde database onthult 76, 000 vingerafdrukken

- Facebook betaalt 100 miljoen in Italiaans fiscaal akkoord

- Op chaotische Zuidoost-Aziatische wegen, lokale held Grab raast voorbij Uber

- Kan een wifi-netwerk ooit volledig veilig zijn?

- Apple biedt 2,5 miljard dollar om de huisvestingscrisis in Californië aan te pakken


 Percentage toevoegen aan een prijs
Percentage toevoegen aan een prijs- Internationaal team schetst eerste grootschalige genomische portret van pre-Columbiaanse Andes-beschavingen
- Europa zoekt gehandicapte astronauten, meer vrouwen in de ruimte
- Facebooks Zuckerberg is de focus van de nieuwste gemanipuleerde video
- Verkiezingsvoorspellingsmodel van UB-experts voorspelt grote winsten van het Huis voor Democraten
- Grondwaterafvoer beïnvloedt de waterkwaliteit in kustwateren
- Singles-bubbels verlichten de problemen:hoe inclusieve systemen effectief zijn in lockdowns
- NASA voltooit onderzoeksvluchten om poolijs in kaart te brengen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
