Wetenschap
Het is niet eenvoudig om een robot tastzin te geven
De tastzin wordt over het algemeen gemeten door een sensor die een druk erop kan vertalen in een klein elektrisch signaal. Krediet:Shutterstock
We hebben robots die kunnen lopen, zien, praten en horen, en manipuleer objecten in hun robothanden. Er is zelfs een robot die kan ruiken.
Maar hoe zit het met tastzin? Dit is gemakkelijker gezegd dan gedaan en er zijn beperkingen aan sommige van de huidige methoden die worden bekeken, maar we ontwikkelen een nieuwe techniek die een aantal van die problemen kan oplossen.
voor mensen, aanraking speelt een vitale rol wanneer we ons lichaam bewegen. Aanraken, gecombineerd met zicht, is cruciaal voor taken zoals het oppakken van voorwerpen - hard of zacht, licht of zwaar, warm of koud - zonder ze te beschadigen.
Op het gebied van robotmanipulatie, waarbij een robothand of grijper een object moet oppakken, het toevoegen van de tastzin kan onzekerheden wegnemen in het omgaan met zachte, breekbare en vervormbare voorwerpen.
De zoektocht naar een slimme huid
Het kwantificeren van aanraking in technische termen vereist niet alleen de precieze kennis van de hoeveelheid externe kracht die op een aanraaksensor wordt uitgeoefend, maar je moet ook de exacte positie van de kracht weten, zijn hoek, en hoe het zal interageren met het object dat wordt gemanipuleerd.
Dan is er nog de vraag hoeveel van deze sensoren een robot nodig heeft. Het ontwikkelen van een robothuid die honderden of zelfs duizenden aanraaksensoren kan bevatten, is een uitdagende technische taak.
Het begrijpen van de fysieke mechanismen van aanrakingsdetectie in de biologische wereld biedt geweldige inzichten als het gaat om het ontwerpen van het robotequivalent, een slimme huid.
Maar een belangrijke barrière voor de ontwikkeling van een slimme huid is de benodigde elektronica.
Dagelijkse kracht- en aanrakingsmeting
De tastzin wordt over het algemeen gemeten door een sensor die druk kan vertalen in een klein elektrisch signaal. Wanneer u een digitale weegschaal gebruikt om uzelf te wegen of ingrediënten af te meten in uw keuken, de weegschaal gebruikt waarschijnlijk een piëzo-elektrische transducer.
Dit is een apparaat dat een kracht omzet in elektriciteit. De kleine elektrische stroom van de transducer wordt dan door draden naar een kleine microchip geleid die de sterkte van de stroom leest, zet dat om in een zinvolle gewichtsmeting, en geeft het weer op een scherm.
Ondanks dat we verschillende niveaus van kracht kunnen voelen, deze elektronische apparaten hebben verschillende beperkingen die het dan onpraktisch maken voor een slimme huid. Vooral, ze hebben een relatief langzame reactietijd op de kracht.
Er zijn andere soorten aanraaksensoren gebaseerd op een materiaal dat zijn andere elektrische eigenschappen verandert, zoals capaciteit of weerstand. Het scherm van uw mobiele telefoon heeft deze technologie mogelijk ingebouwd, en als u een trackpad op uw computer gebruikt, zal deze zeker aanraaksensoren gebruiken.
Zachte en flexibele krachtwaarneming
Er is de afgelopen jaren grote vooruitgang geboekt bij het maken van aanraaksensoren die kunnen worden ingebed in zachte en flexibele materialen. Dit is precies wat we nodig hebben voor een slimme huid.
Maar veel van deze ontwikkelingen mislukken volledig (vanwege het detectietype) in aanwezigheid van vocht. (Heb je ooit een natte vinger op het touchscreen van je smartphone geprobeerd?)
Medische toepassingen zijn nu een belangrijke drijfveer achter de vraag naar flexibele en robuuste krachtdetectie. Bijvoorbeeld, smart skin kan worden gebruikt om sensorische feedback te herstellen bij patiënten met huidbeschadiging of perifere neuropathie (verdoofd of tintelend gevoel). Het kan ook worden gebruikt om prothetische handen basisaanraakgevoelig vermogen te geven.
Onlangs, onderzoekers van MIT en Harvard hebben een schaalbare tactiele handschoen ontwikkeld en gecombineerd met kunstmatige intelligentie. Gelijkmatig over de hand verdeelde sensoren kunnen worden gebruikt om individuele objecten te identificeren, schat hun gewicht, en verken de typische tactiele patronen die naar voren komen als je ze vastpakt.
De onderzoekers creëerden een handschoen met 548 sensoren gemonteerd op een gebreide stof met een piëzoresistieve film (die ook reageert op druk of spanning) verbonden door een netwerk van geleidende draadelektroden.
Dit is de eerste succesvolle poging om dergelijke signalen op grote schaal op te nemen, het onthullen van belangrijke inzichten die kunnen worden gebruikt bij het toekomstige ontwerp van protheses en robotgrijpgereedschappen.
Maar net als bijna alle andere aanraakinterfaces die zijn ontworpen met capacitieve, resistieve of piëzo-elektrische technieken, deze tactiele technologie werkt niet goed met natte vingers of onder water.
Optische krachtmeting aan de horizon
Om dit probleem aan te pakken, we hebben een nieuwe vorm van tactiele sensor ontwikkeld die nanometerdunne films van organische LED's (OLED) en organische fotodiodes (OPD) gebruikt voor het meten van soft touch.
OLED-technologie is normaal gesproken te vinden in televisie- en smartphoneschermen. Onze benadering voor het meten van de tastzin is gebaseerd op optische krachtwaarneming.
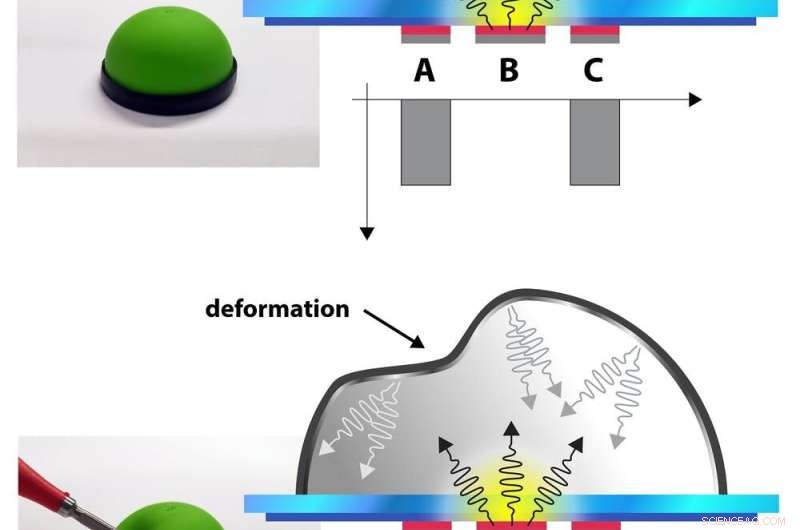
Een enkel aanraakelement bestaande uit een koepel over enkele OLED-pixels. Bovenkant, wanneer niets de koepel raakt, wordt een gelijke hoeveelheid licht gereflecteerd door de lichtgevende pixel B, naar de lichtdetecterende pixels A en C. Onder, als iets de koepel raakt, het is vervormd en de hoeveelheid gereflecteerd licht verandert tussen pixels A en C. Credit:Ajay Pandey, Auteur verstrekt
De OLED-elementen (diodes of pixels genoemd) zijn eigenlijk volledig omkeerbaar. Dit betekent dat niet alleen licht kan worden geproduceerd (zoals in een tv-scherm), deze pixels kunnen ook licht detecteren.
Met behulp van dit principe kunnen we een kleine, ondoorzichtig, flexibele dome met een reflecterende coating die boven enkele OLED-pixels is geplaatst. Licht dat door de centrale pixel wordt uitgezonden, wordt gelijkmatig verdeeld over alle andere pixels onder de koepel als de koepel niet wordt verstoord.
Maar als de koepel wordt ingedrukt - door iets aan te raken - zal hij vervormen, resulterend in een ongelijke respons van de pixels die worden gebruikt om het gereflecteerde licht te detecteren. Door de reacties van tientallen van deze koepels in het contactgebied te combineren, zal het mogelijk zijn om de uitgeoefende kracht te schatten.
Deze aanpak is een belangrijke stap in de richting van het vereenvoudigen van de slimme huidlay-out voor toepassingen op grote oppervlakken en we hopen dat we binnenkort robots zullen zien die full body sensing in de lucht kunnen hebben, als het nat is of zelfs onder water.
Dit artikel is opnieuw gepubliceerd vanuit The Conversation onder een Creative Commons-licentie. Lees het originele artikel. 
 Veelbelovende kandidaat-geneesmiddelen voor prostaatkanker geïdentificeerd
Veelbelovende kandidaat-geneesmiddelen voor prostaatkanker geïdentificeerd- Het voorkomen van zuurstofafgifte leidt tot veiligere batterijen met een hoge energiedichtheid
- Nabij-infrarood reflecterende mengcoatings hebben betere optische en koelprestaties
- Het bedekken van metalen katalysatoroppervlakken met dunne tweedimensionale oxidematerialen kan chemische reacties versterken
- De leiding nemen:onderzoekers werken samen om betere batterijen te maken
- De koudegolf in de VS was een speling van de natuur, snelle analyse vindt
- Geen ruimte voor klimaatvertraging, VN-chef vertelt online top
- Wetenschappers ontdekken dat de foutbron van een zee-ijsmodel varieert met het seizoen
- Verschillen in een veel voorkomende luchtverontreinigende stof zijn zichtbaar vanuit de ruimte
- Waarom je geen stroman-milieuactivist zou moeten zijn
Hoofdlijnen
- Een model van een menselijke cel bouwen
- Soorten sporenvormende bacteriën
- De chemische samenstelling van voedingsstoffen Agar
- Gebruik van DNA Extraction
- Drie soorten vezelig bindweefsel
- Zes hoofdcelfuncties
- Mitochondria: definitie, structuur en functie (met diagram)
- Hoe zal klimaatverandering de arctische kariboes en rendieren beïnvloeden?
- Onderzoekers ontdekken hoe een aan microtubuli gerelateerd gen de neurale ontwikkeling beïnvloedt
- Facebook-zaak over gegevensoverdracht VS gaat naar Europese hoogste rechtbank

- Teams van mobiele 3D-printrobots kunnen bruggen op aarde repareren en naar Mars bouwen
- Bekijk het, Facebook:nieuwe EU-gegevensregels kunnen grote impact hebben

- VS prijst Duitse 5G-standaarden terwijl Huawei-strijd suddert

- Modboat:een goedkope waterrobot met een enkele motor


 Wat is het verschil tussen een vergrootglas en een samengestelde lichtmicroscoop?
Wat is het verschil tussen een vergrootglas en een samengestelde lichtmicroscoop? - Onderzoekers gebruiken aminozuren om hoogwaardige dunne koperfilms te laten groeien
- Internationaal recht in de tijd van het coronavirus
- Vereenvoudigd, verbeterde prestatievoorspelling voor complexe systemen
- Wetenschappers kwantificeren nanodeeltjes-eiwitinteracties
- Typen ecosystemen
- Hoe werken sprinkhanenolie boormachines?
- Pandemische luchtkwaliteit door het weer, niet alleen opsluitingen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
