Wetenschap
Een sociaal perceptieschema voor gedragsplanning van autonome auto's
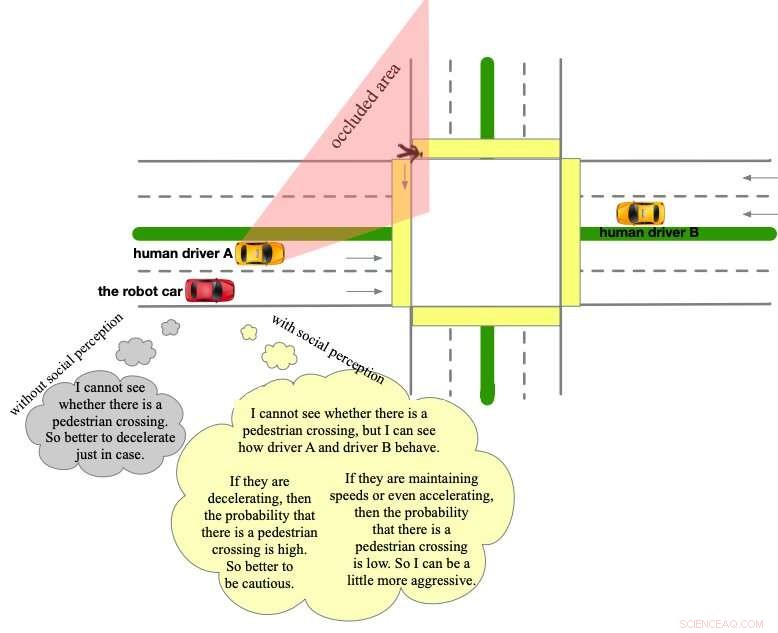
Krediet:Sun et al.
Om door dynamische omgevingen te navigeren, autonome voertuigen (AV's) moeten alle beschikbare informatie kunnen verwerken en gebruiken om effectieve rijstrategieën te genereren. Onderzoekers van de Universiteit van Californië, Berkeley, hebben onlangs een systeem voor sociale perceptie voorgesteld voor het plannen van het gedrag van autonome auto's, die zouden kunnen helpen om AV's te ontwikkelen die beter zijn toegerust om met onzekerheid in hun omgeving om te gaan.
"Mijn onderzoek heeft zich gericht op het ontwerpen van mensachtig rijgedrag voor autonome auto's, "Lichtende zon, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Ons doel is om AV's te bouwen die niet alleen menselijk gedrag begrijpen, maar ook in meerdere opzichten op een vergelijkbare manier presteren, inclusief perceptie, redeneren en handelen."
Sun en haar collega's merkten op dat menselijke bestuurders andere voertuigen vaak als dynamische obstakels beschouwen, vaak aanvullende informatie afleiden uit hun gedrag op de weg. Deze informatie is over het algemeen verborgen omgevingsinformatie of fysiek niet-detecteerbare sociale informatie.
"Het zou heel belangrijk en gunstig zijn voor AV's om zich op dezelfde manier te gedragen, omdat dit hen intelligenter zou maken, menselijker en uiteindelijk veiliger, " zei Sun. "In dit werk, we laten AV's alle andere wegdeelnemers behandelen als dynamische en gedistribueerde sensoren."
Het door Sun en haar collega's voorgestelde sociale perceptieschema behandelt in wezen alle voertuigen en obstakels op de weg als sensoren die in een sensornetwerk zijn verdeeld. Hierdoor kunnen AV's zowel individueel gedrag als groepsgedrag observeren, hun observaties gebruiken om verschillende soorten onzekerheden uniform bij te werken binnen een 'geloofsruimte'. De regeling richt zich met name op onzekerheden in de fysieke toestand (bijvoorbeeld veroorzaakt door occlusies of een beperkt sensorbereik) en sociale gedragsonzekerheden (bijvoorbeeld lokale rijvoorkeuren).
Het schema integreert vervolgens bijgewerkte sociale perceptie-overtuigingen met een probabilistisch planningskader op basis van model voorspellende controle (MPC), waarvan de kostenfunctie wordt geleerd via inverse versterkingsleren (IRL). Deze combinatie tussen een probabilistische planningsmodule en sociaal verbeterde perceptie stelt de voertuigen in staat defensief gedrag te genereren dat sociaal compatibel is en dus niet overdreven streng.
"Door het gedrag van anderen te observeren en te vergelijken met eerdere gedragsmodellen, AV's kunnen redeneren over mogelijke toestanden van de niet-detecteerbare variabelen met alleen hun eigen sensoren, Sun zei. "Dit kan de AV's helpen perceptieonzekerheden te verminderen, net zoals de mens dat doet. In vergelijking met andere bestaande benaderingen, het idee in dit werk breidt effectief het waarnemingsvermogen van de AV's uit zonder extra hardware, en kan helpen om veiligere en efficiëntere manoeuvres te genereren."
Sun en haar collega's evalueerden hun raamwerk in een reeks simulaties met representatieve scenario's met sensorocclusies. Ze ontdekten dat door het imiteren van de sociale perceptiemechanismen van mensen, de waarnemingsmodule detecteerde minder onzekerheden, uiteindelijk veiliger en efficiënter AV-gedrag genereren via een niet-conservatieve verdedigingsplanner.
"Praktisch, deze leuke functie kan AV's efficiënter maken in de aanwezigheid van occlusies, en beter aanpasbaar in nieuwe rijomgevingen, omdat ze snel kunnen afleiden en leren over de fysiek niet-detecteerbare sociale informatie in hun omgeving, ’ legde Zon uit.
In de toekomst, het sociale perceptieschema dat door dit team van onderzoekers is bedacht, zou de ontwikkeling van zelfrijdende auto's kunnen stimuleren die effectiever kunnen navigeren in voortdurend veranderende omgevingen. Sun en haar collega's zijn nu van plan om hun raamwerk verder te ontwikkelen, het veranderen van een aantal van zijn aannames en het gemakkelijker maken om het toe te passen in real-life situaties.
"Om aanvullende onzekere informatie af te leiden uit het gedrag van andere wegdeelnemers, AV's moeten worden uitgerust met eerdere gedragsmodellen die het werkelijke gedrag van anderen kunnen benaderen, " legde Sun uit. "In het huidige werk, we nemen aan dat alle andere wegdeelnemers rationele optimizers zijn en hun gedragsgeneratiemodellen benaderen via beloningsfuncties. In ons toekomstige werk, we gaan de veronderstelling van rationaliteit versoepelen om de benadering praktischer te maken."
© 2019 Wetenschap X Netwerk
 Onderzoek naar de deeltjesgrootte en depositie van dampen
Onderzoek naar de deeltjesgrootte en depositie van dampen- Met behulp van chitine, een bio-geïnspireerd materiaal, om gereedschappen en schuilplaatsen op Mars te vervaardigen
- Eindelijk synthetisch canataxpropellane:een van de meest complexe producten van de natuur reproduceren
- Bio-geïnspireerde strategieën voor de ontwikkeling van nieuwe medicijnen
- Hoe het toevoegen van groene thee-extract aan kant-en-klaar voedsel het risico op norovirus kan verminderen?
Hoofdlijnen
- Vissen gebruiken doofheidsgen om waterbeweging waar te nemen
- Carnivoren weten dat het eten van andere karkassen van carnivoren ziekten overdraagt
- De rol van enzymen bij cellulaire ademhaling
- Onderzoekers verkrijgen gegevens over de ontwikkeling van kippenembryo's
- Nieuwe CRISPR-tool richt zich op RNA in zoogdiercellen
- Dit is waarschijnlijk waarom je een geest hebt gezien, volgens Science
- Wat zijn de verschillen van eenvoudig en gestratificeerd weefsel?
- Landbouwfungicide trekt honingbijen aan, studie vondsten
- Klimaatverandering, bevolkingsgroei kan leiden tot aquacultuur in open oceaan
- Hernieuwbare transportbrandstoffen uit water en koolstofdioxide

- Kameleons tongaanval inspireert snelwerkende robots

- Voorspelbaarheid van tijdelijke netwerken gekwantificeerd door een op entropie gebaseerd raamwerk

- Elektrische scooters:liefde of haat ze? Dit is wat je moet weten

- UPS volgt de verzending van rundvlees van boerderij naar tafel met nieuwe technologie


 Beeldverwerkingsalgoritme belooft veelbelovend voor het in kaart brengen van de bloedvatennetwerken in het oog
Beeldverwerkingsalgoritme belooft veelbelovend voor het in kaart brengen van de bloedvatennetwerken in het oog- Travelling-wave ion mobility massaspectrometrie verheldert structuren van gouden vingers
- Oneindig recyclebaar polymeer toont praktische eigenschappen van kunststoffen
- De werkelijkheid is waarschijnlijk toch geen computersimulatie,
- 10 beste plekken op aarde om de aurora's te bekijken
- Alfabet van 140 puzzelstukjes programma's origami
- Gyroscoopmoleculen vormen kristal dat zowel solide als vol beweging is
- Teslas Autopilot ingeschakeld tijdens crash in Utah
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
