Wetenschap
Op slangen geïnspireerde robot glijdt nog beter dan zijn voorganger
Krediet:Harvard University
Slecht nieuws voor ophiofoben:onderzoekers van de Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) hebben een nieuwe en verbeterde op slangen geïnspireerde zachte robot ontwikkeld die sneller en nauwkeuriger is dan zijn voorganger.
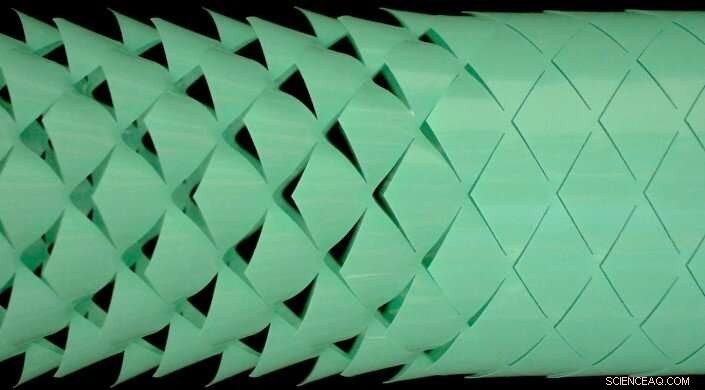
De robot is gemaakt met behulp van kirigami - een Japans papierambacht dat afhankelijk is van sneden om de eigenschappen van een materiaal te veranderen. Terwijl de robot zich uitrekt, het kirigami-oppervlak "opduikt" in een 3D-gestructureerd oppervlak, die de grond vastgrijpt als een slangenhuid.
De robot van de eerste generatie gebruikte een plat kirigami-vel, die uniform transformeerde wanneer uitgerekt. De nieuwe robot heeft een programmeerbare schaal, wat betekent dat de kirigami-snitten naar wens kunnen verschijnen, het verbeteren van de snelheid en nauwkeurigheid van de robot.
Het onderzoek is gepubliceerd in de Proceedings van de National Academy of Sciences .
"Dit is een eerste voorbeeld van een kirigami-structuur met niet-uniforme pop-upvervormingen, " zei Ahmad Rafsanjani, een postdoctoraal onderzoeker bij SEAS en eerste auteur van het artikel. "In platte kirigami, de pop-up is continu, wat betekent dat alles tegelijk opduikt. Maar in de kirigami-schelp, pop-up is discontinu. Dit soort controle van de vormtransformatie zou kunnen worden gebruikt om responsieve oppervlakken en slimme skins te ontwerpen met on-demand veranderingen in hun textuur en morfologie."
Het nieuwe onderzoek combineerde twee eigenschappen van het materiaal:de grootte van de sneden en de kromming van de plaat. Door deze functies te beheersen, de onderzoekers waren in staat om dynamische verspreiding van pop-ups van het ene uiteinde naar het andere te programmeren, of beheer gelokaliseerde pop-ups.
In eerder onderzoek is een plat kirigami-vel werd om een elastomeer-actuator gewikkeld. In dit onderzoek, het kirigami-oppervlak wordt tot een cilinder gerold, met een actuator die kracht uitoefent aan twee uiteinden. Als de sneden een constante grootte hebben, de vervorming plant zich voort van het ene uiteinde van de cilinder naar het andere. Echter, als de grootte van de sneden zorgvuldig wordt gekozen, de huid kan worden geprogrammeerd om in de gewenste volgorde te vervormen.
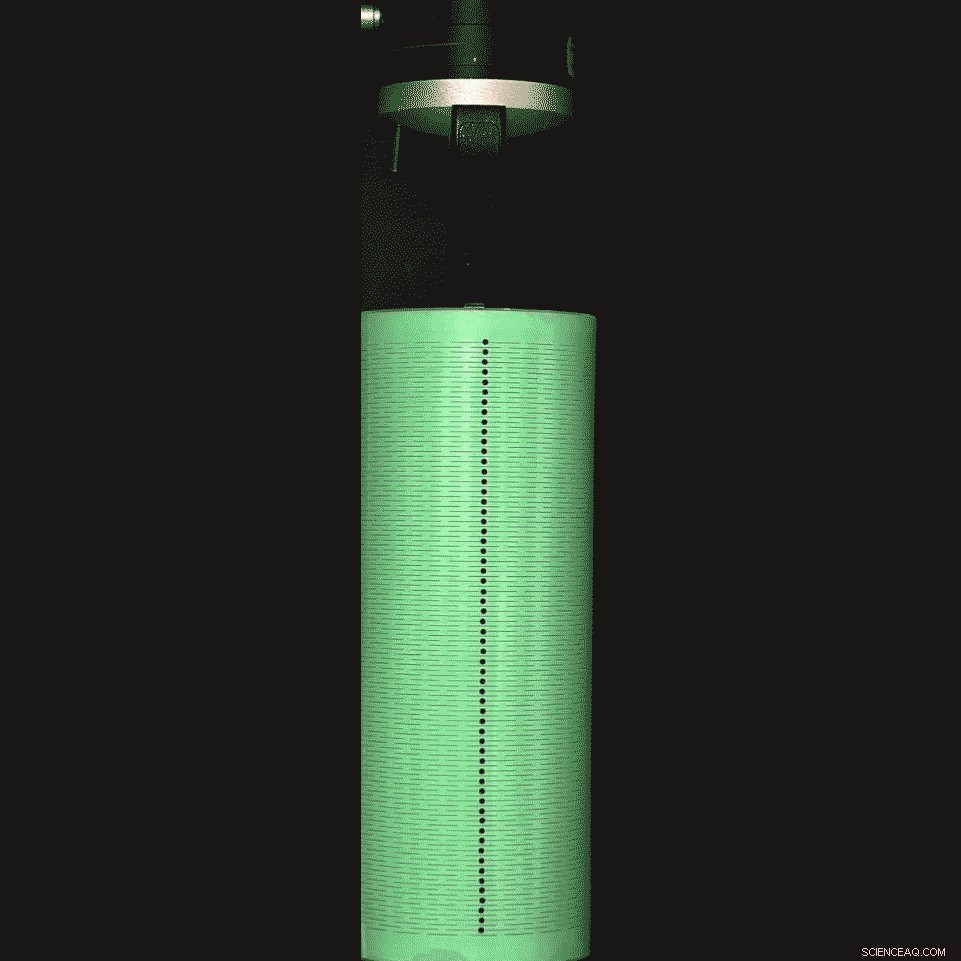
Dit is een nieuwe en verbeterde op slangen geïnspireerde zachte robot die sneller en slimmer is dan zijn voorganger. Krediet:Harvard SEAS
"Door ideeën te lenen van materialen die de fase transformeren en deze toe te passen op door kirigami geïnspireerde architectonische materialen, we hebben aangetoond dat zowel gepopte als niet-gepopte fasen tegelijkertijd naast elkaar kunnen bestaan op de cilinder, " zei Katia Bertoldi, de William en Ami Kuan Danoff Professor of Applied Mechanics bij SEAS en senior auteur van het artikel. "Door simpelweg sneden en krommingen te combineren, we kunnen opmerkelijk ander gedrag programmeren."
Volgende, de onderzoekers willen een invers ontwerpmodel ontwikkelen voor complexere vervormingen.
"Het idee is, als je weet hoe je wilt dat de huid verandert, je kunt gewoon knippen, rollen en gaan, " zei Lishuai Jin, een afgestudeerde student aan SEAS en co-auteur van het artikel.
 Het nieuwe composiet voorkomt storingen van elektronische apparaten
Het nieuwe composiet voorkomt storingen van elektronische apparaten- Een model maken Stikstofatomen
- Computersimulatie van receptoren onthult een nieuwe ligandbindingsplaats
- Volgorde aanbrengen in, mRNA, of misschien nanokristallen? Wijd open veld voor Nobelprijs voor Scheikunde
- Kijken naar licht dat een model fotokatalysator bijna in realtime afbreekt
- De houding ten opzichte van wonen met een gemiddelde dichtheid verandert in Sydney en Melbourne
- Australië moet stoppen met het bouwen van huizen in dergelijke brandgevoelige gebieden
- Pollenseizoen in Zwitserland eerder en intenser door klimaatverandering
- Nieuwe aanwijzing kan het lot van de beroemde Franse ontdekkingsreiziger onthullen
- Aanpassing regenwoud
Hoofdlijnen
- Inzoomen op eiwit om nierstenen te voorkomen
- Hoe bekritiseer je iets zonder een eikel te zijn?
- Wat is het geheim van geluk?
- Hoe toxoplasmose immuuncellen uitbuit om de hersenen te bereiken?
- Deoxyribonucleïnezuur (DNA): structuur, functie en belang
- Op bewijs gebaseerde tips om uw geheugen te verbeteren
- De dichtheid van de Wolbachia-bacterie verandert per seizoen bij vlinders
- Het Bohr-model:snel vervangen maar nooit vergeten
- Verschil tussen een gesloten en open bloedsomloop
- Cambridge Analytica vraagt vrijwillig faillissement aan in de VS:indiening bij de rechtbank

- VAE stelt lancering van eerste kernreactor verder uit

- Wetenschappers zetten koolstofemissies om in bruikbare energie
- Verhoogde veiligheid voor kinderen rond grasmaaiers

- Amazon heroverweegt verhuizing naar New York:rapport


 Extraverte mensen genieten volgens de wetenschap van vier belangrijke voordelen; daar zijn ze
Extraverte mensen genieten volgens de wetenschap van vier belangrijke voordelen; daar zijn ze- Injectiestrategieën zijn cruciaal voor geothermische projecten
- Sinaasappels voeren naar wilde vogels
- Onderzoekers ontdekken nieuw fotoactiveringsmechanisme voor polymeerproductie
- 3D-geprinte kubus maakt gebruik van energieoogst
- Opladen in de richting van interoperabiliteit van elektrische bussen en opladers
- VS blokkeert meer Chinese technologiebedrijven vanwege zorgen over nationale veiligheid
- Modernisering van first responder-training met VR en spraakherkenning
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | German | Dutch | Norway | Italian | Swedish | Danish |

-
Wetenschap © https://nl.scienceaq.com
