Wetenschap
Een slangenrobot die wordt bestuurd door biomimetische CPG's

Uitgang van het neurale netwerk om de robotmotoren aan te sturen. Krediet:Blanchard, Aihara &Levi.
In recente jaren, een groeiend aantal onderzoeken is gericht op het ontwikkelen van op de natuur geïnspireerde robots, vooral door bepaalde diersoorten. In een studie gepubliceerd in het Journal of Robotics van Atlantis Press, Netwerken en kunstmatig leven, een team van onderzoekers van de Universiteit van Bordeaux en de Universiteit van Tokyo heeft een robot gemaakt die qua vorm en beweging op een slang lijkt.
"Het hoofddoel van dit onderzoek was het ontwikkelen van een robot voor biomedische toepassingen, vooral ruggenmergletsels, "Timothee Levi, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "We willen nieuwe neuroprothesen ontwerpen waarbij de kunstmatige neuronen de biologische kunnen vervangen. In onze robot, we gebruikten een biomimetische voortbeweging met behulp van biomimetische spiking neurale netwerken, die hetzelfde gedrag reproduceert dat slangen in de natuur hebben."
Een van de belangrijkste uitdagingen bij het ontwikkelen van bio-geïnspireerde robots is het effectief reproduceren van de voortbeweging van het betreffende dier. Bij dieren, de meeste bewegingen worden gegenereerd door de activiteit van CPG-netwerken (Central Pattern Generation).
Eigenlijk, CPG's zijn neuronale circuits die, wanneer geactiveerd, kan ritmische motorische patronen produceren (bijvoorbeeld lopen, ademen, zwemmen, enz.) bij afwezigheid van sensorische en timinggerelateerde inputs. Vroeger, CPG's en hun effecten op de voortbeweging van dieren zijn de focus geweest van een groot aantal onderzoeken.
Over het algemeen, onderzoekers die dierachtige robots proberen te ontwikkelen, repliceren CPG's met behulp van eenvoudige neuronmodellen of oscillatoren, die geen biologische tijdschalen zijn, en worden daarom beschouwd als bio-geïnspireerde systemen in plaats van bio-mimetische. Deze modellen, echter, alleen sinusvormige oscillaties leveren, en zijn daarom niet in staat om een verscheidenheid aan voortbewegingspatronen van dieren getrouw te reproduceren.
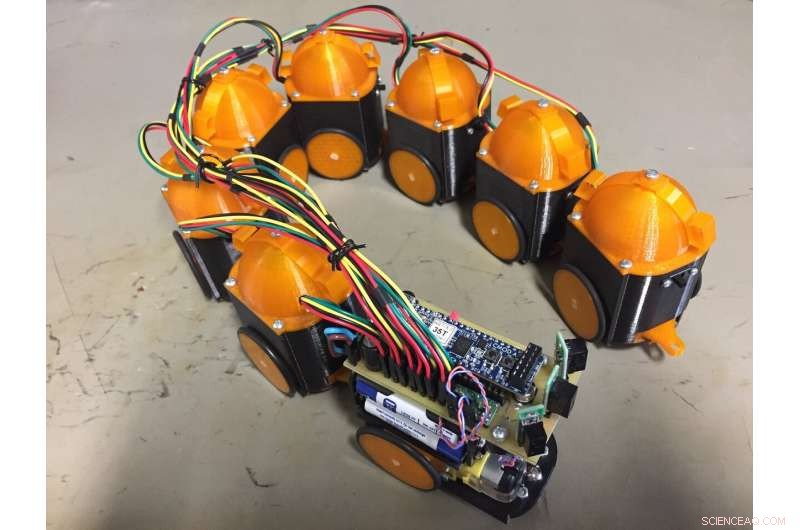
De door de onderzoekers ontwikkelde slangenrobot. Krediet:Blanchard, Aihara &Levi.
In hun studie hebben Levi en zijn collega's wilden biomimetische CPG's ontwikkelen die biologisch gedrag effectief kunnen repliceren, met behulp van een digitaal realtime neuromorfisch systeem. De slangenrobot die ze hebben ontwikkeld, heeft twee belangrijke componenten, de ene fungeert als zijn hersenen en de andere als zijn lichaam.
"Onze slangenrobot kan in 2 delen worden gesplitst, Levi legde uit. "De eerste is zijn brein, met behulp van biomimetische neurale netwerken. Dit neurale netwerk ligt heel dicht bij de biologie met een biofysisch neuronmodel, synapsen en plasticiteit. Het tweede deel is het lichaam, die verschillende "wagons" heeft die het verschillende deel van het ruggenmerg en segmenten van slangen modelleren. Het signaal wordt gecreëerd door het slangenbrein en wordt verspreid in het hele lichaam dat de verschillende motoren aanstuurt."
De slangenrobot die door Levi en zijn collega's is gemaakt, wordt in realtime bestuurd door een netwerk van biomimetische CPG's. De onderzoekers toonden aan dat hun systeem kan worden verbonden met biologische neuronen en ook kan worden gebruikt om verschillende hypothesen of protocolbehandelingen voor biomedische toepassingen te simuleren, zoals ruggenmergletsels en neuroprotheses.
"Naar mijn mening, het meest betekenisvolle aspect van onze studie is dat we probeerden trouw te blijven aan de biologie en erin zijn geslaagd om het neurale netwerk in te bedden in één kleine elektronische kraal, "Zei Levi. "Interessant, de robot die we hebben gemaakt werkt in realtime en heeft dezelfde specificaties als in de natuur (periode van voortbewegen, variabiliteit, lawaai, enzovoort.)."
In de toekomst, de slangenrobot die door Levi en zijn collega's is ontwikkeld, zou een verscheidenheid aan interessante toepassingen kunnen hebben in robotica en andere gebieden. Bijvoorbeeld, het kan worden gebruikt om het gedrag van reptielen beter te begrijpen of het kan meerdere biohybride robotica-toepassingen hebben.
"We zijn nu van plan om meer intelligentie in het brein van de robot toe te voegen met leerregels, evenals het gebruik van de verschillende sensoren, ' zei Levi. 'Bovendien, een van onze doelstellingen op langere termijn is om kunstmatige neuronen en levende neuronen te combineren om één biohybride robot te creëren."
© 2019 Wetenschap X Netwerk
 Hoe beïnvloedt chloor de ozonlaag?
Hoe beïnvloedt chloor de ozonlaag? - Interactie met kernafval in het milieu kan ingewikkelder zijn dan ooit werd gedacht
- Het bespioneren van eetgewoonten van cellen kan de diagnose van kanker helpen
- Buiswormslijm vertoont langdurige, zelfaangedreven gloed
- Elektrochemie opent pad naar duurzame bron van sulfonamiden voor medicijnfabrikanten
- Ondanks onderzoeken, gezondheidseffecten van kolencentrales blijven onbekend
- Satellieten, supercomputers, en machine learning bieden realtime gegevens over het gewastype
- Berichten op maat vergroten het begrip van klimaatverandering bij Republikeinen
- Aarde warmt sneller op dan gedacht, nieuwe klimaatmodellen tonen
- Staten zetten zich schrap voor langdurige strijd tegen overstromingen naarmate de schade toeneemt
Hoofdlijnen
- Prokaryotische versus eukaryotische cellen: overeenkomsten en verschillen
- Telofase: wat gebeurt er in deze fase van mitose en meiose?
- Hoe overleef je een massale uitsterving?
- Waarom is UV-licht schadelijk?
- 10 vreemdste bronnen voor antibiotica
- Hoe maak je een DNA-model van kralen en rietjes
- Hier ziet u hoe het einde van de zomertijd u kan beïnvloeden
- Gelabelde delen van een lintworm
- Wat zijn de verschillen tussen een plant en een dierlijke cel onder een microscoop?






 Het lezen van autofictie kan uitdagen en veranderen wat waar voelt
Het lezen van autofictie kan uitdagen en veranderen wat waar voelt- NASA-satelliet ziet een grote orkaan Lorenzo op weg naar de Azoren
- Berging Titanic:het terugvinden van de scheepsradio kan een ramp betekenen voor het cultureel erfgoed onder water
- Team bedenkt methode om objecten te verkleinen tot nanoschaal
- Grafeen zonder zwaartekracht belooft succes in de ruimte
- Nieuw intelligent systeem leert van eenvoudige problemen om complexe problemen op te lossen
- Zeven opvallende feiten over het geld dat technologiebedrijven verdienen
- De routes van het Hanzetijdperk online onthullen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | Dutch | Danish | Norway | Portuguese | German |

-
Wetenschap © https://nl.scienceaq.com
