Wetenschap
Nieuwe robothand is zacht en sterk
Krediet:Massachusetts Institute of Technology
50 jaar geleden, de eerste industriële robotarm genaamd Unimate assembleerde een eenvoudig ontbijt met toast, koffie, en champagne. Hoewel het er misschien uitzag als een naadloze prestatie, elke beweging en plaatsing werd zorgvuldig gecodeerd.
Zelfs met de meer intelligente en adaptieve robots van vandaag, deze taak blijft moeilijk voor machines met stijve handen. Ze werken meestal alleen in gestructureerde omgevingen met vooraf gedefinieerde vormen en locaties, en kunnen doorgaans niet omgaan met onzekerheden in plaatsing of vorm.
In recente jaren, Hoewel, robotici hebben dit probleem aangepakt door vingers te maken van zachte, flexibel, materialen zoals rubber. Door deze plooibaarheid kunnen deze zachte robots alles oppikken, van druiven tot dozen en lege waterflessen, maar ze kunnen nog steeds geen grote of zware voorwerpen aan.
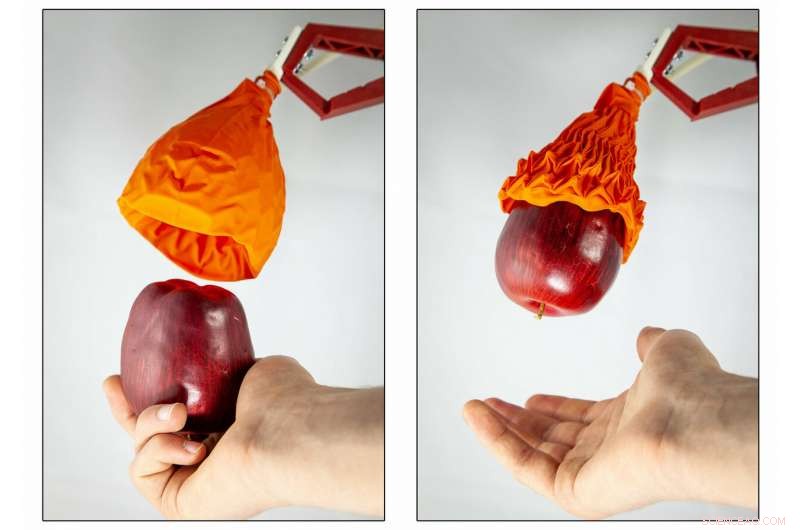
Om deze zachte robots een handje te helpen, onderzoekers van MIT en Harvard hebben een nieuwe grijper ontwikkeld die zowel zacht als sterk is:een kegelvormige origamistructuur die instort op objecten, net als een Flytrap van Venus, om items op te halen die wel 100 keer het gewicht zijn. Door deze beweging kan de grijper een veel breder scala aan objecten vastpakken, zoals soepblikken, hamers, wijnglazen, drones, en zelfs een enkele broccoliroos.
"Een van mijn moonshots is om een robot te maken die automatisch boodschappen voor je kan inpakken, " zegt MIT-professor Daniela Rus, directeur van MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL), en een van de senior auteurs van een nieuw artikel over het project.
"Eerdere benaderingen van het verpakkingsprobleem konden slechts zeer beperkte klassen objecten aan - objecten die erg licht zijn of objecten die zich aanpassen aan vormen zoals dozen en cilinders, maar met het Magic Ball-grijpersysteem hebben we laten zien dat we pick-and-place-taken kunnen uitvoeren voor een grote verscheidenheid aan items, variërend van wijnflessen tot broccoli, druiven en eieren, " zegt Rus. "Met andere woorden, voorwerpen die zwaar zijn en voorwerpen die licht zijn. Objecten die kwetsbaar zijn, of stevig, of die regelmatige of vrije vormen hebben."
Het project is een van de vele projecten van de afgelopen jaren waarbij onderzoekers out-of-the-box denken met robotontwerp. Kogelvormige grijpers, bijvoorbeeld, kan een breder scala aan objecten aan dan vingers, maar heb nog steeds het probleem van beperkte hoeken. Zachtere robotvingers gebruiken meestal perslucht, maar zijn niet sterk genoeg om zwaardere voorwerpen op te pakken.
De structuur van deze nieuwe grijper, In de tussentijd, een geheel andere vorm aanneemt. kegelvormig, hol, en vacuüm aangedreven, het apparaat is geïnspireerd op de "origami-magische bal" en kan een heel object omhullen en met succes oppakken.
De grijper bestaat uit drie delen:de op origami gebaseerde skeletstructuur, de luchtdichte huid om de structuur te omhullen, en de aansluiting. Het team heeft het gemaakt met behulp van een mechanische rubberen mal en een speciaal warmtekrimpend plastic dat zichzelf vouwt bij hoge temperaturen.
Het skelet van de magische bal is bedekt met een rubberen ballon of een dun stoffen vel, niet anders dan het eerdere onderzoek van het team naar door vloeistof aangedreven origami-geïnspireerde kunstmatige spieren (FOAM), die bestond uit een luchtdichte huid rond een opvouwbaar skelet en vloeistof.
Het team gebruikte de grijper met een standaardrobot om zijn kracht te testen op verschillende objecten. De grijper kon objecten pakken en optillen tot 70 procent van zijn diameter, waardoor het een verscheidenheid aan zacht voedsel kon oppakken en vasthouden zonder schade aan te richten. Het kon ook flessen van meer dan vier pond oppakken.
"Bedrijven als Amazon en JD willen een breder scala aan delicate of onregelmatig gevormde objecten kunnen oppikken, maar kan niet met vinger- en zuignapgrijpers, " zegt Shuguang Li, een gezamenlijke postdoc aan het MIT CSAIL en de John A. Paulson School of Engineering and Applied Sciences (SEAS) van Harvard. "Zuignappen kunnen niets met gaten oppakken - en ze hebben iets veel sterkers nodig dan een grijper met zachte vingers."
De robot werkt momenteel het beste met cilindrische objecten zoals flessen of blikjes, waardoor het ooit een aanwinst zou kunnen worden voor productielijnen in fabrieken. Niet verrassend, de vorm van de grijper maakt het moeilijker om iets plats vast te pakken, zoals een broodje of boek.
"Een van de belangrijkste kenmerken van deze benadering van manipulatorconstructie is de eenvoud, " zegt Robert Wood, co-auteur en professor aan Harvard's School of Engineering en Wyss Institute for Biologically Inspired Engineering. "De gebruikte materialen en fabricagestrategieën stellen ons in staat om snel prototypes te maken van nieuwe grijpers, aangepast aan object of omgeving als dat nodig is."
In de toekomst, het team hoopt het probleem van hoek en oriëntatie op te lossen door computervisie toe te voegen waarmee de grijper kan "zien", en het mogelijk maken om specifieke delen van objecten vast te pakken.
"Dit is een heel slim apparaat dat de kracht van 3D-printen gebruikt, een vacuüm, en zachte robotica om het probleem van grijpen op een geheel nieuwe manier te benaderen, " zegt Michael Wehner, een assistent-professor robotica aan UC-Santa Cruz die niet bij het project betrokken was. "In de komende jaren, Ik kan me voorstellen dat ik zachte robots zie die zachtaardig en behendig genoeg zijn om een roos te plukken, maar toch sterk genoeg om een ziekenhuispatiënt veilig op te tillen."
 De moleculaire structuur van een bosaroma gedeconstrueerd
De moleculaire structuur van een bosaroma gedeconstrueerd- Spoordampgenerator voor het opsporen van explosieven, verdovende middelen
- Eenvoudige en snelle pH-experimenten met Litmus
- Een chemische onzichtbaarheidsmantel zou RNA-geheimen kunnen onthullen
- Wetenschappers identificeren overgangsmetaal voor zeer efficiënte kooldioxide-activering
- Canairy-app volgt blootstelling van buitenwerkers aan luchtvervuiling
- Onderzoekers stellen vast waarom satellieten en grondinstrumenten het eens zijn over sommige, niet alle cloudkenmerken
- Insecten in gematigde loofbossen
- Verstikkende rook boven San Francisco zorgt voor vertragingen, sluitingen
- Nieuwe studie zal volgen hoe handelsoorlogen het Midwesten beïnvloeden
Hoofdlijnen
- Hoe reproduceren algen?
- Rol van buffers in cellen
- Bosplantages zijn een krachtige melange voor de koffieproductie
- Wat gebruikt Gamma Roggen?
- De oppervlakte van een cirkel berekenen
- rRNA: Wat is het?
- Wat gebeurt er als mitose verkeerd gaat?
- Los Angeles Zoos oude Indiase neushoorn geëuthanaseerd
- Duizenden johannesbroodbomen geplant terwijl Cyprus het zwarte goud doet herleven
- Kritieke fout aangetoond in algemeen digitaal beveiligingsalgoritme

- Zuckerberg ziet vooruitgang voor Facebook na tumultueus jaar

- Onderzoek wijst uit dat wifi-locatie invloed heeft op online privacygedrag

- Kunstmatige intelligentie automatiseren voor medische besluitvorming

- Europese landen zijn van plan meer waterstof te gebruiken voor energiebehoeften


 Amazon's business-to-business-eenheid verandert in een bedrijf van $ 10 miljard
Amazon's business-to-business-eenheid verandert in een bedrijf van $ 10 miljard- Vier belangrijke typen chromosomen
- Disney verhoogt bod op Fox om Comcast tegen te gaan
- Gewone microben werken samen om polymeercomposieten af te breken
- Wetenschappers identificeren verborgen genetische variatie die de evolutie helpt stimuleren
- Ongekende blik op oxide-interfaces onthult onverwachte structuren op atomaire schaal
- Ondergronds gaan in Slovenië ... om je voor te bereiden op de ruimte
- Team ontwikkelt thermo-elektrisch apparaat dat elektriciteit opwekt met behulp van menselijke lichaamswarmte
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
