Wetenschap
Chips met ultralaag vermogen helpen kleine robots capabeler te maken
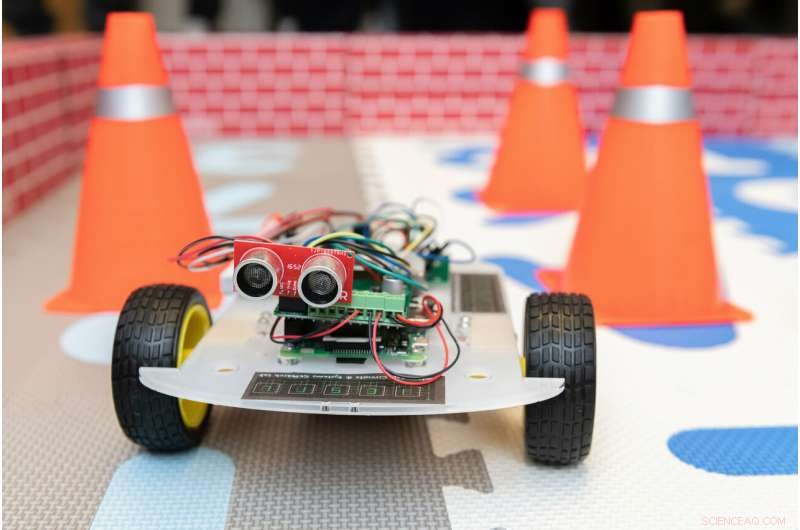
Een robotauto die wordt bestuurd door een hybride chip met ultralaag vermogen, wordt in een arena getoond om te demonstreren dat hij in staat is om te leren en samen te werken met een andere robot. Krediet:Allison Carter, Georgië Tech
Een hybride chip met ultralaag vermogen, geïnspireerd op het brein, kan robots ter grootte van een handpalm helpen om samen te werken en te leren van hun ervaringen. Gecombineerd met nieuwe generaties motoren en sensoren met laag vermogen, het nieuwe toepassingsspecifieke geïntegreerde circuit (ASIC) - dat werkt op milliwatt aan vermogen - zou intelligente zwermrobots kunnen helpen om uren in plaats van minuten te werken.
Om stroom te besparen, de chips gebruiken een hybride digitaal-analoge tijddomeinprocessor waarin de pulsbreedte van signalen informatie codeert. Het neurale netwerk-IC biedt plaats aan zowel modelgebaseerd programmeren als collaboratief versterkend leren, mogelijk de kleine robots grotere mogelijkheden bieden voor verkenning, search-and-rescue en andere missies.
Onderzoekers van het Georgia Institute of Technology demonstreerden robotauto's aangedreven door de unieke ASIC's op de IEEE International Solid-State Circuits Conference (ISSCC) van 2019. Het onderzoek werd gesponsord door de Defense Advanced Research Projects Agency (DARPA) en de Semiconductor Research Corporation (SRC) via het Center for Brain-inspired Computing Enabling Autonomous Intelligence (CBRIC).
"We proberen deze zeer kleine robots intelligentie te geven, zodat ze hun omgeving kunnen leren kennen en zich autonoom kunnen verplaatsen. zonder infrastructuur, " zei Arijit Raychowdhury, universitair hoofddocent aan de Georgia Tech's School of Electrical and Computer Engineering. "Om dat te bereiken, we willen circuitconcepten met een laag vermogen naar deze zeer kleine apparaten brengen, zodat ze zelf beslissingen kunnen nemen. Er is een enorme vraag naar zeer kleine, maar capabele robots die geen infrastructuur nodig hebben."
De auto's gedemonstreerd door Raychowdhury en afgestudeerde studenten Ningyuan Cao, Muya Chang en Anupam Golder navigeren door een arena met rubberen kussens en omgeven door muren van kartonnen blokken. Terwijl ze naar een doelwit zoeken, de robots moeten verkeerskegels en elkaar ontwijken, leren van de omgeving terwijl ze bezig zijn en voortdurend met elkaar communiceren.
De auto's gebruiken traagheids- en ultrasone sensoren om hun locatie te bepalen en objecten om hen heen te detecteren. Informatie van de sensoren gaat naar de hybride ASIC, die dient als het "brein" van de voertuigen. Instructies gaan dan naar een Raspberry Pi-controller, die instructies naar de elektromotoren stuurt.
In robots ter grootte van een handpalm, drie belangrijke systemen verbruiken stroom:de motoren en controllers die worden gebruikt om de wielen aan te drijven en te sturen, de verwerker, en het sensorsysteem. In de auto's gebouwd door Raychowdhury's team, de low-power ASIC betekent dat de motoren het grootste deel van het vermogen verbruiken. "We zijn erin geslaagd de rekenkracht te verlagen tot een niveau waarop het budget wordt gedomineerd door de behoeften van de motoren, " hij zei.
Het team werkt samen met medewerkers aan motoren die gebruikmaken van micro-elektromechanische (MEMS) technologie die met veel minder vermogen kan werken dan conventionele motoren.
"We zouden een systeem willen bouwen waarin detectiekracht, communicatie en computerkracht, en bediening zijn op ongeveer hetzelfde niveau, in de orde van honderden milliwatt, " zei Raychowdhury, die de ON Semiconductor Associate Professor is in de School of Electrical and Computer Engineering. "Als we deze robots ter grootte van een handpalm kunnen bouwen met efficiënte motoren en controllers, we zouden een looptijd van enkele uren moeten kunnen bieden op een paar AA-batterijen. We hebben nu een goed idee wat voor computerplatforms we nodig hebben om dit te leveren, maar we hebben nog steeds de andere componenten nodig om de achterstand in te halen."
In tijddomeincomputers, informatie wordt overgedragen op twee verschillende spanningen, gecodeerd in de breedte van de pulsen. Dat geeft de schakelingen de energie-efficiëntievoordelen van analoge schakelingen met de robuustheid van digitale apparaten.
"De grootte van de chip wordt gehalveerd, en het stroomverbruik is een derde van wat een traditionele digitale chip nodig heeft, " said Raychowdhury. "We used several techniques in both logic and memory designs for reducing power consumption to the milliwatt range while meeting target performance."
With each pulse-width representing a different value, the system is slower than digital or analog devices, but Raychowdhury says the speed is sufficient for the small robots. (A milliwatt is a thousandth of a watt).
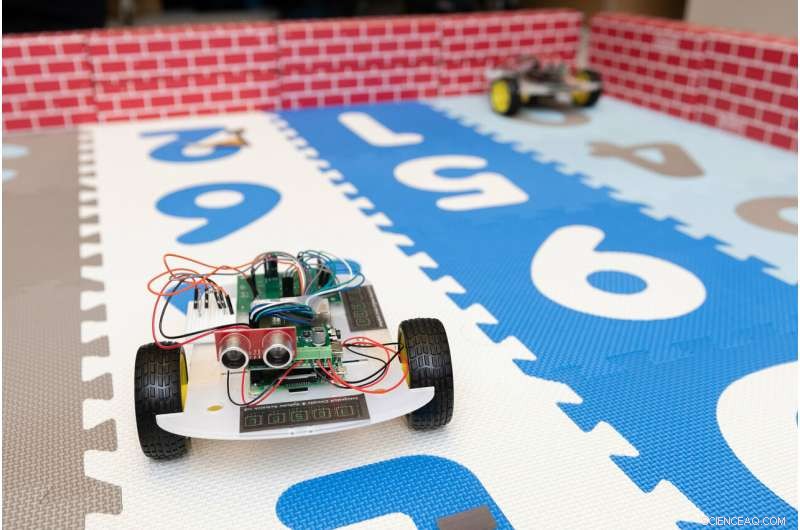
Two robotic cars controlled by an ultra-low power hybrid chip are shown in a test arena where they will demonstrate an ability to learn and collaborate. Krediet:Allison Carter, Georgië Tech
"For these control systems, we don't need circuits that operate at multiple gigahertz because the devices aren't moving that quickly, " he said. "We are sacrificing a little performance to get extreme power efficiencies. Even if the compute operates at 10 or 100 megahertz, that will be enough for our target applications."
The 65-nanometer CMOS chips accommodate both kinds of learning appropriate for a robot. The system can be programmed to follow model-based algorithms, and it can learn from its environment using a reinforcement system that encourages better and better performance over time—much like a child who learns to walk by bumping into things.
"You start the system out with a predetermined set of weights in the neural network so the robot can start from a good place and not crash immediately or give erroneous information, " Raychowdhury said. "When you deploy it in a new location, the environment will have some structures that it will recognize and some that the system will have to learn. The system will then make decisions on its own, and it will gauge the effectiveness of each decision to optimize its motion."
Communication between the robots allow them to collaborate to seek a target.
"In a collaborative environment, the robot not only needs to understand what it is doing, but also what others in the same group are doing, " he said. "They will be working to maximize the total reward of the group as opposed to the reward of the individual."
With their ISSCC demonstration providing a proof-of-concept, the team is continuing to optimize designs and is working on a system-on-chip to integrate the computation and control circuitry.
"We want to enable more and more functionality in these small robots, " Raychowdhury added. "We have shown what is possible, and what we have done will now need to be augmented by other innovations."
 Eenden bieden onderzoekers een unieke kans om menselijke aanraking te bestuderen
Eenden bieden onderzoekers een unieke kans om menselijke aanraking te bestuderen- Nieuwe sensor om atmosferische aerosolen en stikstofdioxide tegelijkertijd te meten
- Eigenschappen van Magnesiumchloride
- Spinchemicaliën voor snellere reacties
- Voorlopers van zuurchloride maken met behulp van shuttle-katalyse
Hoofdlijnen
- Is lachen besmettelijk?
- Belangrijke soorten bacteriën
- Heb jij een dubbelganger? Er is een kans van 1 op een biljoen
- Manieren om te voorkomen dat studenten mobiele telefoons gebruiken in Class
- Zwarte geit gaat weer gedijen in Israël
- Voorbeelden van de vijf thema's van de geografie
- De voordelen van anaërobe ademhaling
- Het effect van zonlicht op dieren en planten
- Waarom creëren Britse wetenschappers een hybride mens-varken?
- Lessen van de crash op de luchthaven van Moskou:laat je bagage achter

- Aston Martin onthult eerste SUV ogen luxe kopers in China

- Facebook investeert in duurzame energie met Texas zonneproject

- Er is geen bewijs dat 5G onze gezondheid schaadt, dus laten we ons er geen zorgen over maken

- Zuid-Koreaans ruilt bitcoins voor 2 mln euro in valse biljetten


 Schade door overstromingen hoeft niet onvermijdelijk te zijn
Schade door overstromingen hoeft niet onvermijdelijk te zijn- De koudste temperatuur van vloeibaar water en de bijzonderheid ervan vinden
- IJsbevingen rommelen waarschijnlijk langs geiserspugende breuken in de ijzige maan Enceladus van Saturnus
- Kleine klassen verkleinen prestatiekloven in de wetenschap
- Oude Maya's bouwden geavanceerde waterfilters
- Natuurkundigen stellen een tweede niveau van kwantisatie voor voor de kwantum Shannon-theorie
- Op weg naar Parijs:het veranderende landschap van CO2-reductie
- Hoge niveaus van giftige metalen gevonden in kolenas van energiecentrale Dominicaanse Republiek
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Portuguese | German | Dutch | Norway | Italian | Spanish | Swedish | Danish |

-
Wetenschap © https://nl.scienceaq.com
