Wetenschap
Een benadering voor bewegingsplanning op asteroïde oppervlakken met onregelmatige zwaartekrachtvelden
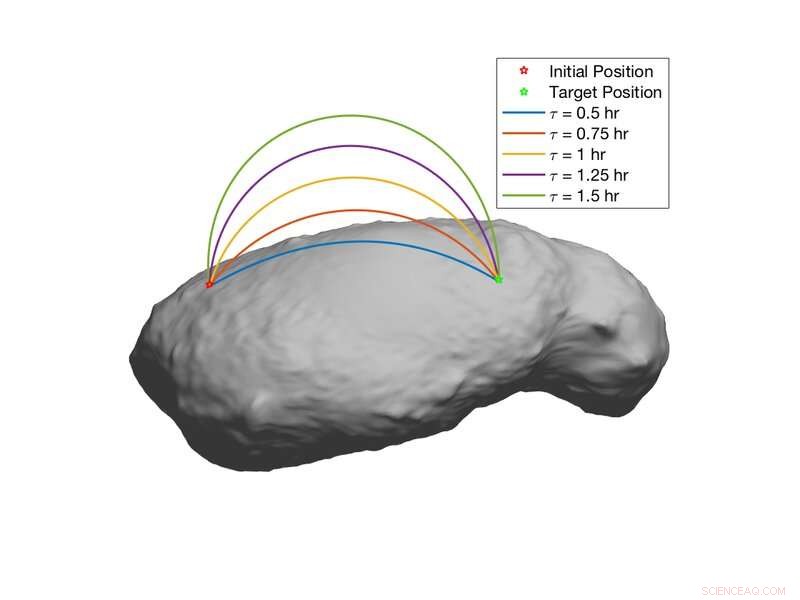
Hoppaden van de oorspronkelijke locatie naar een doellocatie op het oppervlak van Itokawa. Krediet:Kalita &Thangavelautham.
Asteroïden zijn klein, rotsachtige lichamen die rond de zon draaien en te klein zijn om planeten te worden genoemd. Er zijn miljoenen asteroïden in het zonnestelsel, variërend in grootte, vorm en compositie. De verkenning van asteroïden zou kunnen helpen om fascinerende informatie te ontdekken over de oorsprong van het zonnestelsel, van planeet Aarde, en van het leven zelf.
Asteroïden kunnen ook dienen als strategische plekken voor planetaire wetenschap, mijnbouw, communicatierelais of planetaire verdediging. Tot dusver, echter, het verkennen van de oppervlakken van asteroïden is zeer uitdagend gebleken vanwege hun lage en zeer niet-lineaire zwaartekrachtveld.
Recente asteroïde missies, zoals Hayabusa II en OSIRIS-Rex waren slechts fly-by of touch-and-go-operaties. Onderzoekers hebben dus geprobeerd technologie te ontwikkelen die de verkenning van asteroïde-oppervlakken mogelijk zou maken, bijvoorbeeld, in situ instrumenten gebruiken om hun samenstelling en ondergrondmateriaal te analyseren.
Hoppende robots kunnen bijzonder nuttig zijn voor het verkennen van dergelijke oppervlakken, omdat mobiliteit door ballistisch hoppen verschillende voordelen heeft in de aanwezigheid van onregelmatige zwaartekrachtvelden. Dit soort robots kan grote afstanden over ruw terrein afleggen, met een beperkt energieverbruik. Een team van onderzoekers van de Universiteit van Arizona heeft onlangs de dynamiek van ballistisch hoppen en een nieuwe benadering voor bewegingsplanning op asteroïde-oppervlakken ontwikkeld.
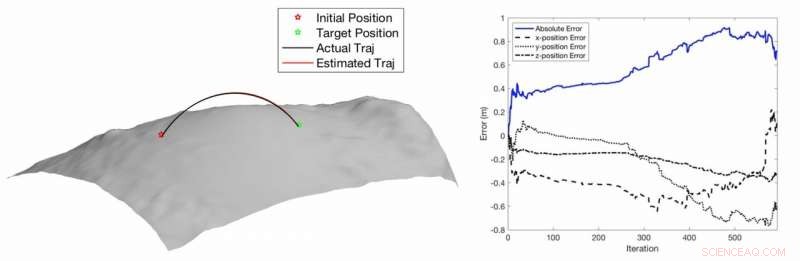
Zelflokalisatie met behulp van 3D-puntenwolkscanmatching. Krediet:Kalita &Thangavelautham.
"In tegenstelling tot de aarde, asteroïde zwaartekracht is laag, omdat zulke hopping rovers meer geschikt zijn, omdat ze grote afstanden kunnen afleggen over willekeurig ruw terrein met weinig energie, "Himangshu Kalita, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Echter, hun onregelmatige vorm resulteert in een zeer onregelmatig zwaartekrachtveld, wat het hoppen zeer onzeker maakt. Dus, een sequentiële architectuur voor hopping rover-autonomie is vereist die vooruit kan plannen voordat een hop wordt uitgevoerd en tegelijkertijd zichzelf kan lokaliseren."
De aanpak van Kalita en zijn collega Jekan Thanga berekent de snelheid die nodig is om een doelwit te onderscheppen en lokaliseert vervolgens de springende robot. Om de robot te lokaliseren, de onderzoekers gebruikten pose-schattingsmethoden op basis van opeenvolgende scan-matching met behulp van een 3D-laserscanner.
De verzamelde informatie wordt vervolgens gebruikt om de beweging van de springende robot op het oppervlak van de doelasteroïde te plannen. De robot zou meerdere sprongen moeten uitvoeren om een gewenste locatie op de asteroïde te bereiken, terwijl je ook obstakels ontwijkt.
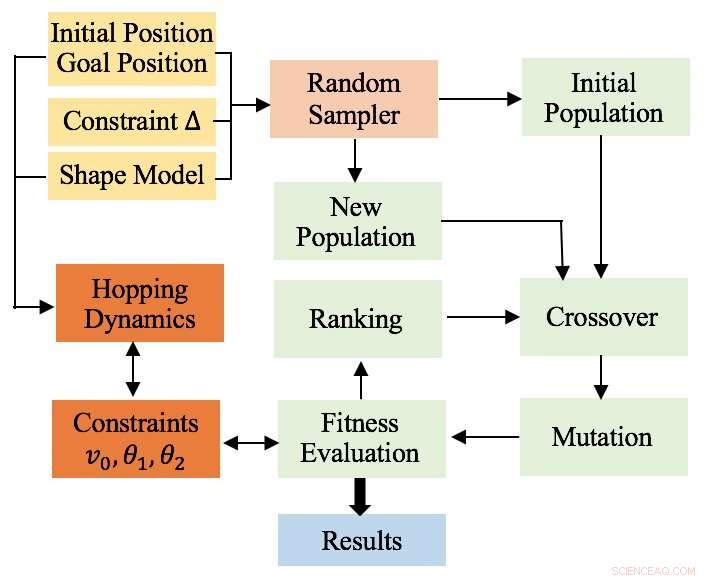
Schema van de geoptimaliseerde padplanner met behulp van evolutionair algoritme. Krediet:Kalita &Thangavelautham.
"De bewegingsplanningsarchitectuur die in het artikel wordt besproken, kan bijna optimale banen vinden voor een hoppende rover om een doellocatie te bereiken vanaf zijn oorspronkelijke locatie op het oppervlak van een asteroïde met onregelmatige zwaartekrachtvelden, " legde Kalita uit. "Onze aanpak maakt gebruik van een high-fidelity dynamica-model om evaluatie met vallen en opstaan uit te voeren in de simulatie van kandidaat-manoeuvres om hun geschiktheid te bepalen. De evaluatie van vallen en opstaan houdt rekening met risico, beloningen en lokale onzekerheden."
Veel asteroïden zijn rijk aan hulpbronnen zoals water, koolstofverbindingen, ijzer- en platinagroepmetalen. Sommige asteroïden bevatten ook resten van bestaande planeten en zouden dus kunnen dienen als 'tijdcapsules', het verstrekken van ongerepte records van de vroege geologie en geo-geschiedenis van dergelijke planeten. Het verkennen van deze asteroïden zou waardevol inzicht kunnen bieden in de oorsprong van het zonnestelsel en de planeten die zich daarin bevinden. In de toekomst, de door Thanga en Kalita bedachte benadering zou de weg kunnen effenen voor de verkenning van asteroïde-oppervlakken, leiden tot interessante observaties en ontdekkingen.
-
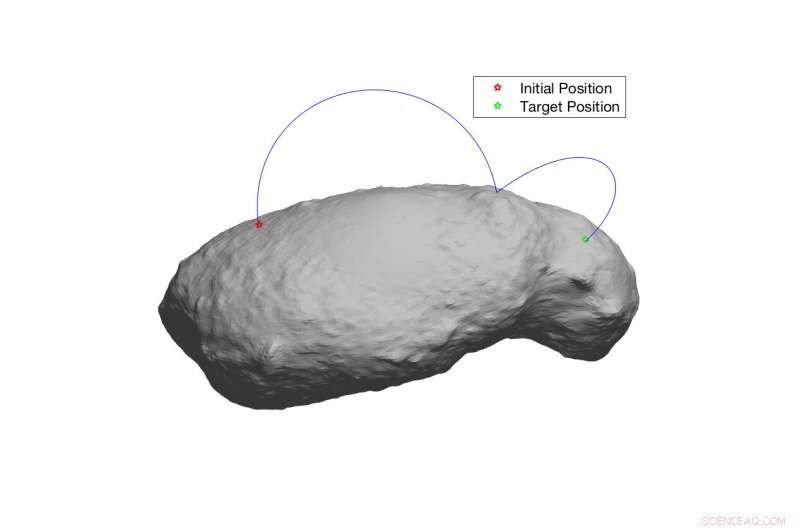
Optimaal traject gegenereerd door de padplanner om een doellocatie te bereiken. Krediet:Kalita &Thangavelautham.
-
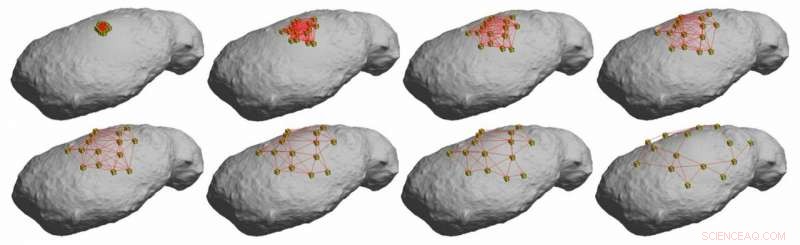
Meerdere rovers verkennen samen het oppervlak van asteroïde Itokawa. Krediet:Kalita &Thangavelautham.
-
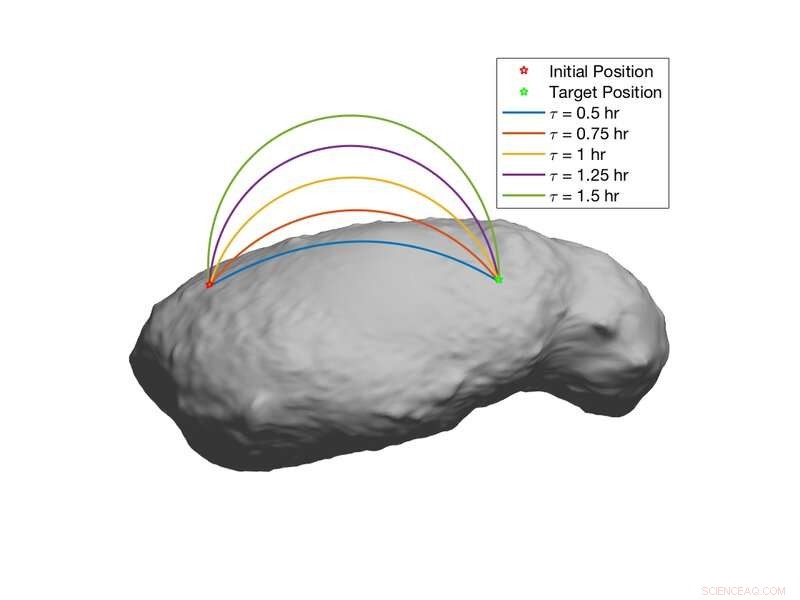
Hoppaden van de oorspronkelijke locatie naar een doellocatie op het oppervlak van Itokawa. Krediet:Kalita &Thangavelautham.
"Flyby- en langeafstandsobservatie van asteroïden is onvoldoende om te bepalen wat zich onder de bovenste laag asteroïden bevindt, " zei Thanga. "Onze aanpak, wat het uitvoeren van ballistisch hoppen inhoudt voor oppervlakteverkenning van asteroïden, kan deze vragen beantwoorden. Bovendien, de rovers die tot nu toe op asteroïde-oppervlakken zijn ingezet, vertrouwen op een moederschip voor lokalisatie, maar hun ontmoeting komt zelden voor. Onze simulaties laten zien dat door gebruik te maken van een 3D-mappingsensor aan boord, de rovers kunnen moederschip-onafhankelijke zelflokalisatie uitvoeren, wat een voorloper is voor rover-autonomie."
De aanpak van Thanga en Kalita is ontworpen om de beweging van een springende robot over lange afstanden effectief te plannen, op asteroïde oppervlakken met onregelmatige zwaartekrachtvelden. Dezelfde benadering kan worden toegepast op meerdere gecoördineerde robots die tegelijkertijd het oppervlak van een bepaalde asteroïde verkennen. De onderzoekers hebben hun methode ook uitgebreid om verschillende optimale trajecten te berekenen, waarmee een robot een gewenst doel kan bereiken terwijl hij meerdere waypoints bezoekt.
"We zijn nu bezig met het ontwikkelen van prototypes voor geminiaturiseerde hoppende rover die op sublimaat gebaseerde drijfgassen zullen gebruiken om te springen, Kalita zei. "Met gesimuleerde onregelmatige zwaartekrachtvelden, we zullen onze aanpak kunnen testen om huppeltrajecten te vinden."
© 2019 Wetenschap X Netwerk
 Ontwerpen van hiërarchische nanoporeuze membranen voor zeer efficiënte adsorptie- en opslagtoepassingen
Ontwerpen van hiërarchische nanoporeuze membranen voor zeer efficiënte adsorptie- en opslagtoepassingen- Duurzame kunststoffen zijn in aantocht
- Producten biologisch afbreekbaarder maken met zetmeel
- Traditionele Chinese geneeskrachtige plant levert nieuwe insecticiden op
- Industrieel gebruik van jodium
Hoofdlijnen
- Handelen of niet handelen? De ivoren impasse doorbreken
- Nieuwe strategie zou bestaande medicijnen in staat kunnen stellen bacteriën te doden die chronische infecties veroorzaken
- Het bacteriële sociale netwerk hacken
- 10 planten verloren in de geschiedenis
- Een 3D-plantencel maken
- Hoe maak je een dierencel uit Candy
- Heb jij een innerlijke stem? Niet iedereen doet
- Onderzoeker ontdekt dat wanneer sperma concurreert, eieren hebben een keuze
- Cellulaire ademhaling bij de mens






 Wat is ureum?
Wat is ureum? - Wil je je robocall-pijn in bedwang houden? Probeer nu deze 3 dingen
- NASA vindt zware regenval in de zich ontwikkelende tropische storm Nate
- Online STEM-demonstraties kunnen net zo effectief zijn als lesgeven in de klas
- Hoe bouw je een Mason Bee House
- Zou de neolithische revolutie het bewijs kunnen leveren van de beste manieren om ons aan te passen aan klimaatverandering?
- Microscoopkit verandert smartphones in laboratoriumtools
- Studie dwingt tot heroverweging van de bevolkingsgeschiedenis van Ibiza
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
