Wetenschap
Een machine learning-techniek gebruiken om een hondachtige robot wendbaarder en sneller te maken
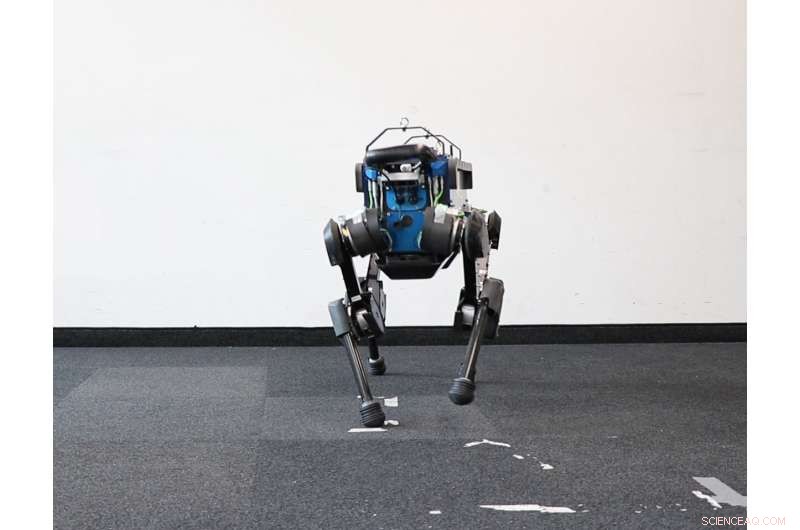
De ANYmal-robot. Krediet:Hwangbo et al., Wetenschap. Robot. 4, eaau5872 (2019)
Een team van onderzoekers van Robotic Systems Lab in Zwitserland en Intelligent Systems Lab in Duitsland en de VS heeft een manier gevonden om machine learning toe te passen op robotica om dergelijke machines meer mogelijkheden te geven. In hun artikel gepubliceerd in het tijdschrift Wetenschap Robotica , de groep beschrijft hoe ze machine learning toepasten op robotica en zo een hondachtige robot meer wendbaarheid en snelheid gaven.
Machine learning is de laatste tijd veel in het nieuws, omdat dergelijke systemen menselijke vermogens blijven besluipen, waardoor ze ongekende mogelijkheden krijgen. In deze nieuwe poging de onderzoekers probeerden een deel van diezelfde verbetering toe te passen op een hondachtige robot genaamd ANYmal - een ongebonden machine ter grootte van een grote hond die rond kan lopen op een manier die erg lijkt op die van een echt dier. ANYmal is oorspronkelijk gemaakt door een team van Robotic Systems Lab en is gecommercialiseerd. Nu is het bedrijf een samenwerking aangegaan met Intelligent Systems Lab om de robot de mogelijkheid te geven om te leren hoe hij de dingen moet doen die hij doet door te oefenen, in plaats van door te programmeren.
Machine learning werkt door doelen voor een systeem op te stellen en het vervolgens een middel te geven om manieren te testen om die doelen te bereiken - voortdurend verbeterend naarmate benchmarks worden bereikt. Het testen wordt steeds opnieuw gedaan, soms duizenden keren. Dergelijk testen is moeilijk met een robot, zowel vanwege de vele factoren die erbij betrokken zijn (zoals alle attributen die nodig zijn om het evenwicht te bewaren) als vanwege de enorme tijdsinvestering. Nadat we een manier hadden gevonden om het eerste probleem aan te pakken, de onderzoekers vonden een manier om de tweede te omzeilen. In plaats van ELKE worsteling door zijn leerregime in de echte wereld, de onderzoekers creëerden een virtuele versie van de robot die op een eenvoudige desktopcomputer kon draaien.
De onderzoekers merken op dat het ongeveer 1000 keer sneller was om de robot te laten leren in zijn virtuele incarnatie dan in de echte wereld. Ze lieten de virtuele hond zichzelf maximaal 11 uur trainen en downloadden vervolgens de resultaten naar de fysieke robot. Uit testen bleek dat de aanpak heel goed werkte. De nieuwe en verbeterde versie van ANYmal was wendbaarder (in staat om te voorkomen dat een mens hem omtrapt en kon zichzelf weer rechtzetten als hij viel) en hij liep ongeveer 25 procent sneller.
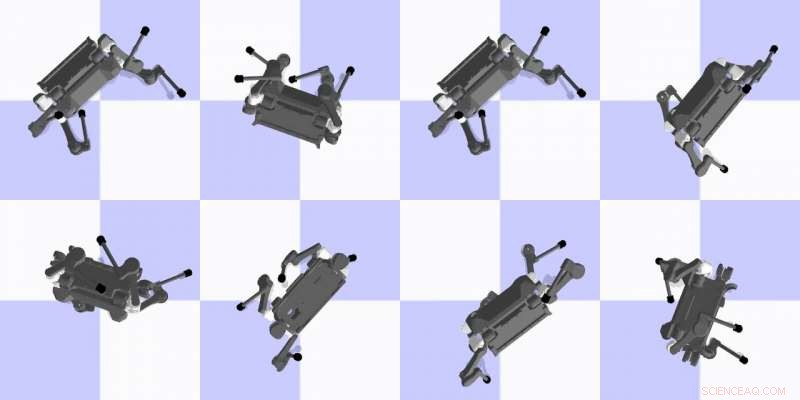
Verschillende valconfiguraties van de ANYmal-robot. Krediet:Hwangbo et al., Wetenschap. Robot. 4, eaau5872 (2019)
© 2019 Wetenschap X Netwerk
 Meringue-achtig materiaal kan vliegtuigen zo stil maken als een haardroger
Meringue-achtig materiaal kan vliegtuigen zo stil maken als een haardroger- Nieuwe aardgaskatalysator zou schoon transport stimuleren
- Welke elementen zijn in gloeilampen?
- Met gewone tape, onderzoekers maken chip die de ontwikkeling van medicijnen kan versnellen
- Hoe de optimale temperatuur voor een enzym te meten
- Onderzoekers ontdekken dat de wereldwijde methaanuitstoot in de oceaan wordt gedomineerd door ondiepe kustwateren
- Regent het in een woestijn?
- NASA ziet kleine tropische cycloon Caleb vervagen
- Wetenschappers identificeren hotspots van kustrisico's in Latijns-Amerika en het Caribisch gebied
- Het rode tij groeide in minder dan een maand drastisch langs de westkust van Florida
Hoofdlijnen
- De krimpende eland van Isle Royale
- Survival of the least-fit:antiviraal middel richt zich selectief op de meest onaangename virussen
- Hoe cellen tellen met een microscoop
- Processen die ATP als energiebron gebruiken
- Osmose & celstructuur
- Hoe SARS werkt
- Hoe deelbaar door uit te drukken in Excel
- Mummies buikjes om de evolutie van de spijsvertering te onthullen
- Mannelijke dolfijnen bieden geschenken aan om vrouwtjes aan te trekken
- Smart home-dashboard om het energieverbruik beter te visualiseren

- Niet meteen:elektrische auto's hebben nog een lange weg te gaan

- Warmteterugwinning in staalfabrieken om concurrentiekracht te vergroten

- Twitter zoekt hulp bij het meten van de gezondheid van zijn wereld

- Afbeelding:Robotachtige vultrechter


 Hoe een breuk in de eenvoudigste vorm te schrijven
Hoe een breuk in de eenvoudigste vorm te schrijven- Diamanten in uw apparaten:kracht voor de volgende generatie energieopslag
- Wat is de definitie van een gemeenschappelijke oplossing in College Algebra?
- Studie vindt fysieke verwering van steenafbraak belangrijker dan eerder werd erkend
- Californië heeft steenkool gedumpt - is gas de volgende?
- Rusland zegt Facebook te onderzoeken na hardhandig optreden van Telegram
- Nickelodeon bouwt Filippijns onderwaterpretpark
- Onderzoekers onderzoeken of supernova's grote oceaandieren hebben gedood bij het aanbreken van het Pleistoceen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | German | Dutch | Norway | French | Swedish | Danish |

-
Wetenschap © https://nl.scienceaq.com
