Wetenschap
Ambidextere robots kunnen e-commerce drastisch versnellen

Een nieuwe "ambidextrous" benadering stelt robots in staat om een breed scala aan objecten vast te pakken zonder training. Krediet:Adriel Olmos
E-commerce blijft groeien en heeft tijdens de afgelopen feestdagen nieuwe niveaus bereikt. Om het enorme volume en de verscheidenheid aan bestellingen snel te kunnen vervullen, bedrijven zoals Amazon, Walmart, en Alibaba investeren fors in nieuwe magazijnen. Om het tekort aan arbeidskrachten aan te pakken, veel bedrijven overwegen robots. Echter, het betrouwbaar grijpen van een breed scala aan producten blijft een grote uitdaging voor robotica.
In een woensdag gepubliceerde krant 16 januari in Wetenschap Robotica , ingenieurs aan de Universiteit van Californië, Berkeley presenteert een roman, "ambidextere" benadering om een breed scala aan objectvormen te grijpen zonder training.
"Een enkele grijper kan niet alle objecten aan, " zei Jeff Mahler, een postdoctoraal onderzoeker aan UC Berkeley en hoofdauteur van het artikel. "Bijvoorbeeld, een zuignap kan geen afdichting creëren op poreuze voorwerpen zoals kleding en grijpers met parallelle kaken kunnen mogelijk niet beide zijden van sommige gereedschappen en speelgoed bereiken."
Mahler werkt in het lab van Ken Goldberg, een UC Berkeley-hoogleraar met gezamenlijke benoemingen bij de faculteiten Electrical Engineering and Computer Sciences en de faculteit Industrial Engineering and Operations Research.
De robotsystemen die in de meeste e-commerce fulfilmentcentra worden gebruikt, zijn afhankelijk van zuiggrijpers die het bereik van objecten dat ze kunnen grijpen, kunnen beperken. Het UC Berkeley-papier introduceert een "ambidextere" benadering die compatibel is met een verscheidenheid aan grijpertypen. De aanpak is gebaseerd op een gemeenschappelijke "beloningsfunctie" voor elk type grijper die de kans kwantificeert dat elke grijper zal slagen. Hierdoor kan het systeem snel beslissen welke grijper voor elke situatie moet worden gebruikt. Om effectief een beloningsfunctie te berekenen voor elk type grijper, het artikel beschrijft een proces voor het leren van beloningsfuncties door te trainen op grote synthetische datasets die snel worden gegenereerd met behulp van gestructureerde domeinrandomisatie en analytische modellen van sensoren en de fysica en geometrie van elke grijper.
Toen de onderzoekers beloningsfuncties trainden voor een parallel-kaakgrijper en een zuignapgrijper op een tweearmige robot, ze ontdekten dat hun systeem bakken met maximaal 25 voorheen onzichtbare objecten opruimde met een snelheid van meer dan 300 picks per uur met een betrouwbaarheid van 95 procent.
"Als je in een magazijn pakketten aan het samenstellen bent voor levering, objecten variëren sterk, " zei Goldberg. "We hebben een verscheidenheid aan grijpers nodig om een verscheidenheid aan objecten te hanteren."
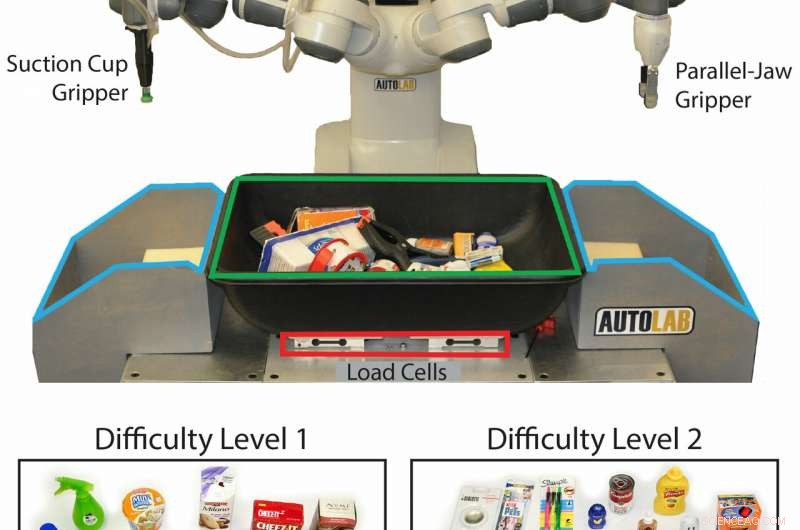
Opstelling van de tweearmige ambidextere robot en de objecten die hij probeerde te grijpen, onderverdeeld in twee moeilijkheidsgraden. Krediet:Mahler et al., Wetenschap. Robot. 4, eaau4984 (2019)
 Nieuwe benadering van terpeensynthese
Nieuwe benadering van terpeensynthese- Nieuwe ontdekking van cellulose kan leiden tot nieuwe chemicaliën, biobrandstoffen
- Geïnspireerd door bot, nieuw adaptief materiaal wordt sterker door trillingen
- Kunstmatige intelligentie ARTIST legt direct materiaaleigenschappen vast
- Studie werpt nieuw licht op productie van hydroxylradicalen, die helpen bij het afbreken van luchtverontreinigende stoffen
- Weer van Coral Reefs
- Onderzoekers waarschuwen voor gevolgen voor het klimaat als de Braziliaanse snelweg door de Amazone wordt geasfalteerd
- Oude rotsen, bevooroordeelde gegevens:uitdagingen overwinnen bij het bestuderen van de geodynamo
- Zes dingen die u moet weten over het rode tij in Florida
- Hoe hongersnood werkt
Hoofdlijnen
- Op bewijs gebaseerde tips om uw geheugen te verbeteren
- Huidige vee-injecties verhogen het risico op letsel, onderzoek vindt
- Wat is een Mordant in de microbiologie?
- Verschil tussen plant- en diercelafdeling
- Symbiose en celevolutie:Lynn Margulis en de oorsprong van eukaryoten
- Wat betekent ion?
- Hoe verbeteren microscopen ons leven vandaag?
- Heeft Kelp veel verschillende cellen?
- Hoe is zuurstof belangrijk voor de afgifte van energie in de celademhaling?
- Omstreden Air France-KLM-aandelen stijgen als hotelgroep onderzoekt bod (update)

- Zelflerende bionische hand kan leiden tot nieuwe generatie prothetische ledematen

- Een nieuw algoritme zorgt voor meer realistische geluidseffecten in VR

- Huidachtige sensoren geven een menselijke touch aan draagbare technologie

- De eerste wetenschappelijke databank van Indonesië is een stap in de richting van het versterken van open data-praktijken


 Ruimteweer kan moeilijk zijn voor Arctische regio's - nieuwe techniek helpt bij het voorspellen van ruimteweer
Ruimteweer kan moeilijk zijn voor Arctische regio's - nieuwe techniek helpt bij het voorspellen van ruimteweer- Terug naar de zwaartekracht:Russen praten over 's werelds eerste ruimtefilm
- Wetenschappers co-auteur Edwards Aquifer memoires
- Google maakt jarenlang goed dat oplichters topposities in zoekresultaten krijgen met nieuw systeem
- Tekenen en symptomen van hondsdolheid bij eekhoorns
- Hoe het kubieke volume van een Log
- Onderzoekers ontwikkelen nieuw allergiehulpmiddel met behulp van koude plasmatechnologie
- Hoe de natuur te herstellen en menselijke ellende te voorkomen:VN-rapport
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
