Wetenschap
Een nieuwe zwervende biologger die langs het lichaamsoppervlak van een potvis reist

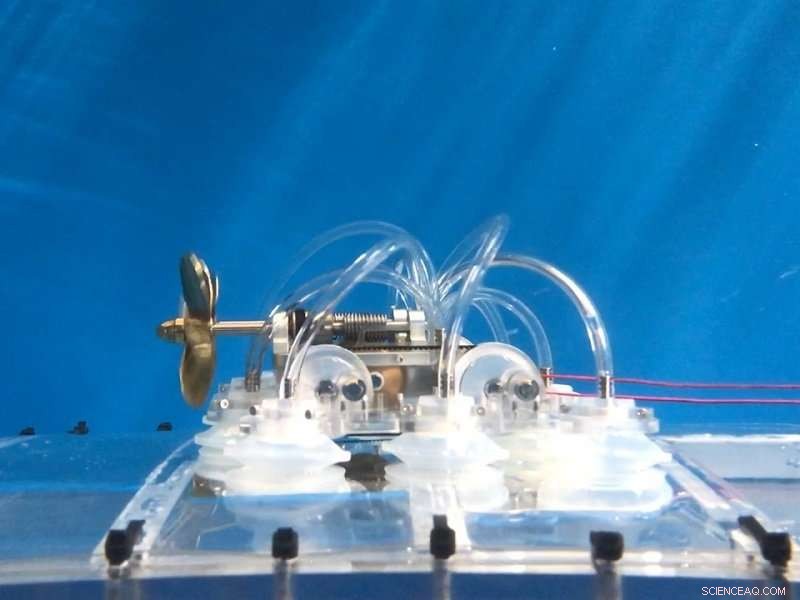
Krediet:Tsuchiya et al.
Een team van onderzoekers van Yamagata University en Teikyo University of Science, in Japan, hebben onlangs een nieuwe zwervende biologger ontwikkeld, of walvisrover, die langs het lichaamsoppervlak van een potvis kan reizen en waardevolle gedragsgegevens kan verzamelen. Biologging omvat het biologisch volgen van individuele dieren, meestal door kleine dataloggers rechtstreeks op hun lichaam te bevestigen. Het kan een zeer effectieve manier zijn om de mysteries van het dierenleven te ontrafelen, door het verzamelen van gegevens en observaties met betrekking tot het gedrag van een dier, beweging, en biologie.
"Ons project begon in 2012. In het voorgaande jaar, een mariene zoöloog, Prof. Kyoichi Mori, met mij had overlegd hoe we een actueel probleem konden aanpakken, " Prof. Yuichi Tsumaki, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "We wilden graag videogegevens vastleggen van jagende potvissen, omdat niemand weet wat er gebeurt als een potvis een reuzeninktvis eet."
traditioneel, dieren worden bestudeerd door hun gedrag visueel te observeren, gewoontes en biologie. Echter, deze visuele observatiemethoden zijn moeilijk te implementeren als het gaat om onderzoek naar de ecologie van zeedieren, vooral degenen die de diepten van de zee of oceaan bewonen.
Biologtechnieken hebben het vermogen van onderzoekers om deze dieren in hun natuurlijke habitat te bestuderen aanzienlijk verbeterd. In recente jaren, vooruitgang in elektronische technologie heeft geleid tot de ontwikkeling van een breed scala aan biologgers van verschillende groottes en gewichten.
Met biologgers kunnen onderzoekers belangrijke informatie over zeedieren verzamelen, inclusief hun 3D-bewegingstraject, duik diepte, en zwemsnelheid, evenals fysiologische gegevens zoals lichaamstemperatuur en elektrocardiogrammetingen. Sommige van deze biologgers zijn ook uitgerust met camera's en kunnen zo ongekende afbeeldingen of video's verzamelen die het roofzuchtige of sociale gedrag van een dier weergeven.
Krediet:Tsuchiya et al.
"We wilden een cameralogger rond de mond bevestigen, met als hoofddoel het opnemen van beelden van een potvis die een reuzeninktvis eet, " legde Tsumaki uit. "Om dit te bereiken, we hebben een walvisrover ontwikkeld die het potentieel heeft om de mond van het dier te bereiken. De walvisrover is gebaseerd op het 'milieugedreven concept' dat in ons vorige werk werd voorgesteld, in het kader van asteroïde-exploratie. Om zich voort te bewegen in ruwe omgevingen met minimale mechanismen, de energie van de omgeving wordt gebruikt voor voortbeweging. Dit systeem zou idealiter zowel compactheid als mobiliteit moeten bereiken op een diepte van meer dan 1000 m."
De door Tsumaki en zijn collega's ontwikkelde walvisrover verbetert de zichtbaarheid van de mond van een potvis terwijl deze over de diepe zee beweegt, reizen langs het lichaamsoppervlak van het dier met behulp van robottechnologie. Een milieugedreven concept dat door de onderzoekers is bedacht, stelt de biologger in staat om adsorptiebeweging te bereiken, gebruik van de waterstroom die wordt opgewekt door een zwemmende walvis als krachtbron, zonder afhankelijk te zijn van een aparte centrale verwerkingseenheid (CPU) en batterij.
"We hebben de afmetingen verkleind door het ventielsysteem te concentreren, en verhoogde de adsorptiekracht door de zuignapmaat en flexibiliteit te vergroten, "Kosuke Tsuchiya, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "We hebben een adsorptie-loopbeweging bereikt op een diepte van 500 m met alleen de waterstroom als krachtbron. Onze technologie heeft het potentieel om te worden gebruikt op het gebied van niet alleen biologgen, maar ook onderwaterrobottoepassingen, zoals inspectie van onderzeese kabelsystemen of inspectie van de bodem van grote schepen."
De onderzoekers testten hun innovatieve en milieugedreven walvisrover in verschillende veld- en laboratoriumexperimenten. Ze ontdekten dat het met succes over een vlak acryloppervlak kon reizen op een diepte van bijna 500 m, wat de toepasbaarheid in diepzeeomgevingen bevestigt.
Krediet:Tsuchiya et al.
In watertanklab-experimenten, de biologger kan over een gebogen acryloppervlak van 1,5 m reizen, met een slagingspercentage van 46%. Deze voorlopige bevindingen suggereren dat de technologie mogelijk nog niet toepasbaar is in real-world scenario's, waar het langere afstanden zou moeten afleggen. Echter, over het algemeen leverde de biologger veelbelovende resultaten op, met een groot potentieel voor een verscheidenheid aan onderwatertoepassingen.
"Momenteel, we ontwerpen een nieuw prototype met een nieuwe zuignapopstelling, meetapparatuur en vlotter, "Zei Tsumaki. "Deze kenmerken zouden ons in staat moeten stellen om het prototype voor de eerste keer aan het lichaamsoppervlak van een potvis te bevestigen. In de nabije toekomst, we gaan experimenten doen in de oceaan rond de Ogasawara-eilanden."
© 2018 Wetenschap X Netwerk
 Onderzoekers ontwikkelen molecuul dat kan leiden tot eerste synthetische antimalariamiddel in één dosis
Onderzoekers ontwikkelen molecuul dat kan leiden tot eerste synthetische antimalariamiddel in één dosis- Nieuwe computationele methode vermindert het risico op medicijnformulering
- De effecten van water tijdens een titratie-experiment
- Hoe Mg /m3 te converteren naar Ppm
- Zelfherstellend cement kan de geothermische industrie transformeren
- Wetenschappers ontwikkelen nieuwe technologie om drinkwater te beschermen tegen algentoxines uit het Eriemeer
- Onderzoekers vinden bewijs om het gedrag van langzame aardbevingen te verklaren
- Dunner wordende ozonlaag heeft mogelijk 252 miljoen jaar geleden de grootste massa-extinctie op aarde veroorzaakt
- Mestfeest en hongersnood:het wereldwijde stikstofprobleem oplossen
- Lidar-onderzoek suggereert dat de verliezen aan koolstofopslag groter zijn dan gedacht in Amazone als gevolg van verliezen aan de rand van bossen
Hoofdlijnen
- Drie artikelen helpen de code van co-enzym Q-biosynthese te kraken
- Wat is de schijfachtige structuur aan de zijde van chloroplasten?
- De celstructuur van een ui
- Wat weefsel zacht en toch zo taai maakt?
- Gekooide blauwe mosselen als milieudetectives
- Dolfijnen slaan mensen, chimpansees bij vroege tekenen van zelfbewustzijn
- Wetenschappers roepen op tot actie om invasieve boomsoort aan te pakken
- Waarom haten sommige mensen het geluid van kauwen? Wetenschappers hebben misschien het antwoord
- De microbiologische kunst van het maken van een betere worst
- Lessen om te leren, ondanks nog een melding over vermiste vlucht MH370 en nog steeds geen verklaring

- Hoe studenten voor te bereiden op de opkomst van kunstmatige intelligentie op de arbeidsmarkt

- Autofabrikanten melden lagere autoverkopen in het eerste kwartaal van het eerste kwartaal door virushit

- Dit is waarom elektrische auto's veel gegrom hebben, oomph en koppel

- Lesotho komt naar voren als onwaarschijnlijk testbed voor 5G-revolutie


 Leuk feit over fossiele brandstoffen voor kinderen
Leuk feit over fossiele brandstoffen voor kinderen- Wetenschappers ontdekken dat houtskool ammoniakvervuiling opvangt
- Op nanoschaal is deeltjes stromen op onverwachte manieren
- Wat inheemse overlevenden van seksueel misbruik van kinderen aan onderzoekers vertelden die ze nodig hebben
- Geen Hoover-dammen meer:waterkrachtlanden lijden meer armoede, corruptie en schulden
- Energiereuzen worden geconfronteerd met een productievermindering van 35% om de klimaatdoelstellingen van Parijs te halen:waakhond
- De efficiëntie van op de natuur geïnspireerde metaheuristieken in dure wereldwijde optimalisatie met een beperkt budget
- Google gaat in beroep tegen record EU-boete over Android
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
