Wetenschap
De druk voelen met universele tactiele beeldvorming
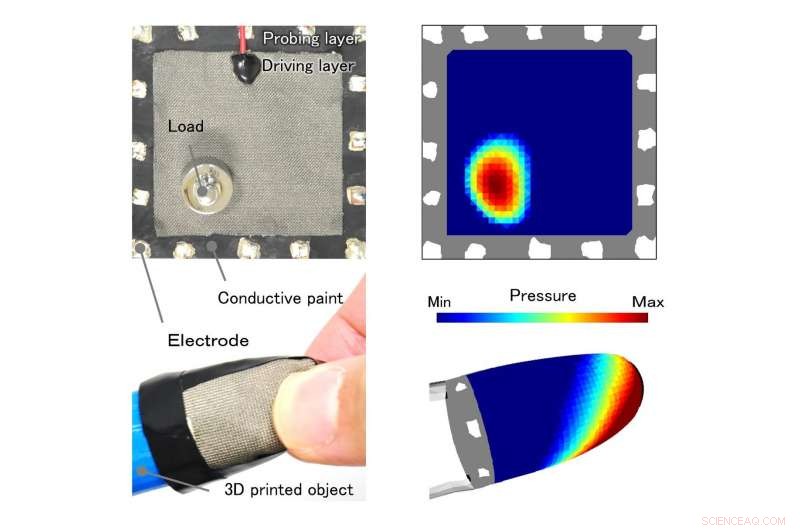
Fig. 1. Tactiele beeldvorming met universele geleiders. Krediet:Universiteit van Osaka
Aanraken, of tactiele waarneming, is van fundamenteel belang voor een reeks van real-life toepassingen, van robotica tot chirurgische geneeskunde tot sportwetenschap. Tactiele sensoren zijn gemodelleerd naar de biologische tastzin en kunnen onderzoekers helpen de menselijke waarneming en beweging te begrijpen. Onderzoekers van de Universiteit van Osaka hebben nu een nieuwe benadering ontwikkeld voor het meten van drukverdeling met behulp van tactiele beeldvormingstechnologie.
Druk is een van de belangrijkste kenmerken van aanraking, en tactiele beeldvorming kan worden gebruikt om druk- of spanningsverdelingen over een interessant object te meten. De meest voorkomende huidige benadering van tactiele beeldvorming omvat het gebruik van een reeks sensoren die zijn samengesteld uit drukgevoelige materialen. Echter, dergelijke arrays vereisen complexe fabricageprocessen en stellen beperkingen aan het sensorontwerp, vandaar de noodzaak van een nieuwe methode, nu beschreven in een artikel in IEEE-transacties op industriële elektronica .
"De druk tussen twee geleiders is direct gerelateerd aan de elektrische contactweerstand ertussen, " zegt Osamu Oshiro van de Universiteit van Osaka. "We hebben deze relatie gebruikt om een sensor te ontwikkelen die bestaat uit een paar elektromechanisch gekoppelde geleiders, waarbij de ene geleider een aandrijffunctie had en de andere de sondefunctie. Deze sensor heeft geen drukgevoelige materialen nodig en is eenvoudiger te vervaardigen."
Deze strategie maakte de ontwikkeling mogelijk van een universele tactiele sensor voor het meten van de contactdrukverdeling met behulp van eenvoudige geleidende materialen zoals koolstofverf. Het ontwerpconcept combineerde innovatie in mechatronicatechnologie, die de ontwikkeling mogelijk maakte van een flexibele sensor op basis van conventionele geleiders die zijn aangesloten op elektroden, met een op tomografie gebaseerde benadering voor het bepalen van de drukverdeling over de gekoppelde geleiders.
De voorgestelde methode is verbeterd ten opzichte van eerdere op elektrische impedantie tomografie gebaseerde tactiele detectietechnieken om sensoren te voorzien van een hoge positionele nauwkeurigheid, instelbare gevoeligheid en bereik, en een relatief eenvoudig fabricageproces. "De sensoren kunnen worden gerealiseerd met behulp van verschillende geleidende materialen, inclusief geleidende stoffen en verven, " zegt hoofdauteur Shunsuke Yoshimoto. "Flexibele sensoren van het plaattype werden vervaardigd, samen met vingervormige sensoren geproduceerd door 3D-geprinte structuren te coaten met geleidende verf, om mogelijke praktische toepassingen te illustreren."
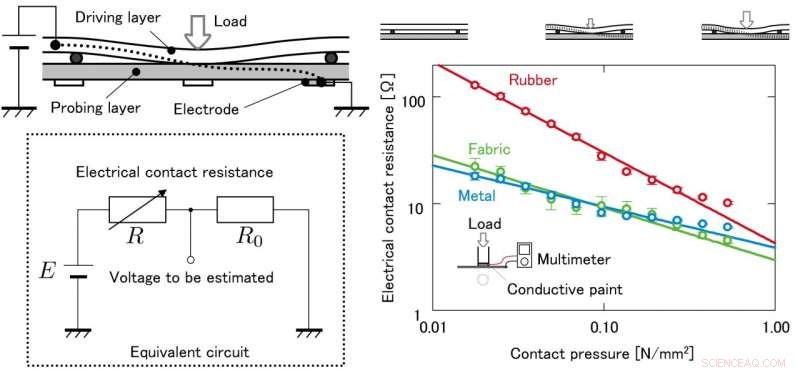
Fig. 2. Sensorprincipe en illustratie van de relatie tussen de elektrische contactweerstand en de contactdruk. Krediet:Universiteit van Osaka
Het gemak van aanpassing van de gevoeligheid en het detectiebereik en de precisie van de drukschatting betekent dat deze tactiele beeldvormingsbenadering naar verwachting geavanceerde besturing van multifunctionele robots mogelijk zal maken. "Van deze sensoren wordt verwacht dat ze toepasbaar zijn op gebieden zoals de bediening van apparaten op afstand en industriële automatisering, ", stelt co-auteur Yoshihiro Kuroda.
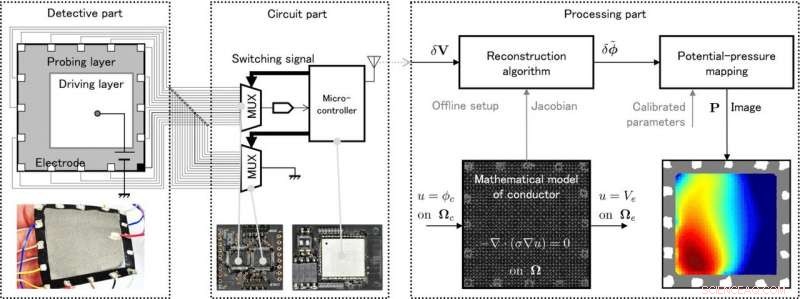
Fig. 3. Overzicht van de belangrijkste onderdelen van het sensorsysteem. Krediet:Universiteit van Osaka
 Nieuwe materialen:Briljant wit zonder pigmenten
Nieuwe materialen:Briljant wit zonder pigmenten- Chemici melden een nieuwe toepassing voor het afvalproduct van de opwekking van kernenergie
- Bacteriën aanvallen met op haaienhuid geïnspireerde oppervlakken
- Scholes vindt nieuw magnetisch veldeffect in diamagnetische moleculen
- Onderzoekers beoordelen de vooruitgang in 3D-printen van legeringen met hoge entropie
- Offshore olie- en gasboringen verbieden
- Het snel bevolkte kustgebied van de Golf tot Pakistan wordt geconfronteerd met een enorm tsunami-risico
- 'S Werelds grootste stadsdatabase werpt licht op onze steeds meer verstedelijkte planeet
- De waterkwaliteit kan veranderen in gebouwen die zijn gesloten tijdens de COVID-19-pandemie, ingenieurs zeggen:
- Erosie van de Himalaya geregeerd door tektonische bewegingen, de effecten van klimaatverandering op landschapsvorming beperken
Hoofdlijnen
- Deskundigen maken zich zorgen over rauw vlees-diëten voor katten en honden
- Wat hebben piranha's en goudvissen gemeen?
- Wat bevindt zich aan de linkerkant van uw lichaam in menselijke anatomie?
- Fysische en chemische eigenschappen van lipiden
- Schimmel is afhankelijk van bacteriën om de belangrijkste componenten van zijn voortplantingsmechanisme te reguleren
- Onderzoek levert test op om bittere pitstoornis in Honeycrisp-appels te voorspellen
- Mimetolieten:de gezichten die we zien in rotsformaties
- 6 veelvoorkomende hallucinaties en wat ze ons vertellen
- rRNA: Wat is het?
- De-identificatieteam onderzoekt gezichtsherkenningsblok in video's

- Opkomende economieën maken inhaalslag in smartphone-adoptie:enquête

- Huawei verliest juridische aanklacht tegen Amerikaans federaal aankoopverbod

- Meer grimmig nieuws voor Amerikaanse kranten:enquête

- Neurale netwerk dat potentiële medicijnen veilig vindt, kan grootschalige pooling van gevoelige gegevens aanmoedigen


 De verborgen dreiging van lerarenstress
De verborgen dreiging van lerarenstress- NASA volgt een gefragmenteerde, zwakkere tropische storm Hector in noordwestelijke Stille Oceaan
- Wetenschapsnieuws dat je tijdens de vakantie hebt gemist
- Gemeenschappelijke spinnen in Zuid-Afrika
- Wat gebeurt er met een exotherme reactie als de temperatuur wordt verhoogd?
- Sentinel-satelliet legt geboorte van gigantische ijsberg vast
- Hoe kunnen er pitloze druiven zijn? Hoe kunnen ze zich voortplanten?
- Wordt kunstmatige intelligentie de toekomst van muziek?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
