Wetenschap
Zelfrijdende auto's buiten de gebaande paden rijden

Een zelfrijdende auto rijdt het bos in. Krediet:Matthew Doude, CC BY-ND
Autonome voertuigen kunnen de algemene regels van Amerikaanse wegen volgen, herkennen van verkeerslichten en rijstrookmarkeringen, het opmerken van oversteekplaatsen en andere vaste kenmerken van de straten. Maar ze werken alleen op goed gemarkeerde wegen die vooraf zorgvuldig zijn gescand en in kaart zijn gebracht.
Veel verharde wegen, Hoewel, hebben vervaagde verf, borden verduisterd achter bomen en ongebruikelijke kruispunten. In aanvulling, 1,4 miljoen mijl Amerikaanse wegen - een derde van de openbare wegen van het land - zijn onverhard, zonder wegmarkeringen zoals rijstrookmarkeringen of stop-hier-lijnen. Dat is exclusief kilometers privéwegen, onverharde opritten of onverharde paden.
Wat moet een regelvolgende autonome auto doen als de regels onduidelijk of niet bestaan? En wat moeten de passagiers doen als ze ontdekken dat hun voertuig hen niet kan brengen waar ze heen gaan?
Rekening houden met het obscure
De meeste uitdagingen bij het ontwikkelen van geavanceerde technologieën hebben betrekking op het omgaan met zeldzame of ongewone situaties, of gebeurtenissen die prestaties vereisen die verder gaan dan de normale mogelijkheden van een systeem. Dat geldt zeker voor autonome voertuigen. Enkele voorbeelden op de weg zijn het navigeren door bouwzones, een paard en wagen tegenkomen, of het zien van graffiti die eruitziet als een stopbord. Van de weg af, de mogelijkheden omvatten de volledige verscheidenheid van de natuurlijke wereld, zoals bomen langs de weg, overstromingen en grote plassen – of zelfs dieren die de weg versperren.

gesimuleerde woestijn, weide- en bosomgevingen gegenereerd door de Mississippi State University Autonomous Vehicle Simulator. Krediet:Chris Goodin, Staatsuniversiteit van Mississippi, Auteur verstrekt
Bij het Centrum voor geavanceerde voertuigsystemen van de Mississippi State University, we zijn de uitdaging aangegaan om algoritmen te trainen om te reageren op omstandigheden die bijna nooit voorkomen, zijn moeilijk te voorspellen en complex om te creëren. We proberen autonome auto's in het moeilijkst mogelijke scenario te plaatsen:rijden in een gebied waarvan de auto geen voorkennis heeft, zonder betrouwbare infrastructuur zoals wegverf en verkeersborden, en in een onbekende omgeving waar het net zo waarschijnlijk is om een cactus als een ijsbeer te zien.
Ons werk combineert virtuele technologie en de echte wereld. We creëren geavanceerde simulaties van levensechte buitenscènes, die we gebruiken om kunstmatige intelligentie-algoritmen te trainen om een camerafeed te nemen en te classificeren wat het ziet, bomen labelen, lucht, open paden en mogelijke obstakels. Vervolgens zetten we die algoritmen over naar een speciaal gebouwd testvoertuig met vierwielaandrijving en sturen we het naar onze speciale offroad-testbaan, waar we kunnen zien hoe onze algoritmen werken en meer gegevens kunnen verzamelen om in onze simulaties te verwerken.
Virtueel starten
We hebben een simulator ontwikkeld die een breed scala aan realistische buitenscènes kan creëren waar voertuigen doorheen kunnen navigeren. Het systeem genereert een scala aan landschappen met verschillende klimaten, zoals bossen en woestijnen, en kan laten zien hoe planten, struiken en bomen groeien in de loop van de tijd. Het kan ook weersveranderingen simuleren, zonlicht en maanlicht, en de nauwkeurige locaties van 9, 000 sterren.

Een wegspoeling, zoals te zien in het echte leven, links, en in simulatie. Krediet:Chris Goodin, Staatsuniversiteit van Mississippi, Auteur verstrekt
Het systeem simuleert ook de metingen van sensoren die vaak worden gebruikt in autonome voertuigen, zoals lidar en camera's. Die virtuele sensoren verzamelen gegevens die als waardevolle trainingsgegevens in neurale netwerken worden ingevoerd.
Een testbaan bouwen
Simulaties zijn slechts zo goed als hun weergave van de echte wereld. Mississippi State University heeft 50 hectare grond aangekocht waarop we een testbaan aan het ontwikkelen zijn voor off-road autonome voertuigen. Het pand is uitstekend geschikt voor off-road testen, met ongewoon steile hellingen voor ons gebied van Mississippi - tot 60 procent hellingen - en een zeer diverse populatie van planten.
We hebben bepaalde natuurlijke kenmerken van dit land geselecteerd waarvan we verwachten dat deze bijzonder uitdagend zullen zijn voor zelfrijdende voertuigen, en repliceerde ze precies in onze simulator. Dat stelt ons in staat om de resultaten van de simulatie direct te vergelijken met real-life pogingen om door het eigenlijke land te navigeren. Eventueel, we zullen vergelijkbare echte en virtuele combinaties van andere soorten landschappen creëren om de mogelijkheden van ons voertuig te verbeteren.

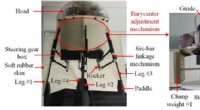
De Halo Project-auto kan gegevens verzamelen over rijden en navigeren in ruig terrein. Krediet:Beth Newman Wynn, Staatsuniversiteit van Mississippi, Auteur verstrekt
Meer gegevens verzamelen
We hebben ook een testvoertuig gebouwd, genaamd het Halo-project, die een elektromotor en sensoren en computers heeft die door verschillende offroad-omgevingen kunnen navigeren. De Halo Project-auto heeft extra sensoren om gedetailleerde gegevens over de werkelijke omgeving te verzamelen, waarmee we virtuele omgevingen kunnen bouwen om nieuwe tests in uit te voeren.
Twee van zijn lidar-sensoren, bijvoorbeeld, zijn onder elkaar kruisende hoeken aan de voorkant van de auto gemonteerd, zodat hun stralen over de naderende grond zwaaien. Samen, ze kunnen informatie geven over hoe ruw of glad het oppervlak is, evenals het vastleggen van metingen van gras en andere planten en items op de grond.
We hebben enkele opwindende vroege resultaten van ons onderzoek gezien. Bijvoorbeeld, we hebben veelbelovende voorlopige resultaten laten zien dat machine learning-algoritmen die zijn getraind in gesimuleerde omgevingen nuttig kunnen zijn in de echte wereld. Zoals bij de meeste onderzoeken naar autonome voertuigen, er is nog een lange weg te gaan, but our hope is that the technologies we're developing for extreme cases will also help make autonomous vehicles more functional on today's roads.
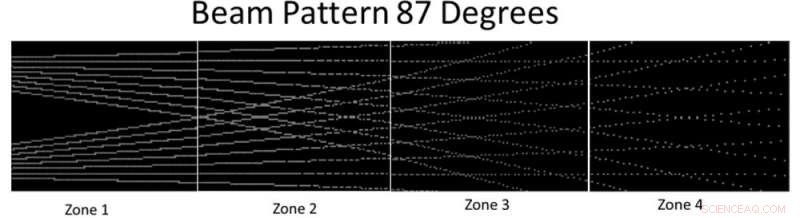
Lidar beams intersect, scanning the ground in front of the vehicle. Credit:Chris Goodin, Mississippi State University, Author provided
Dit artikel is opnieuw gepubliceerd vanuit The Conversation onder een Creative Commons-licentie. Lees het originele artikel. 
 Hoe Bullet Proof Glass
Hoe Bullet Proof Glass- Veerkrachtige en duurzame rubberen trottoirs kunnen duizenden levens redden, wetenschappers zeggen:
- Schimmelgeesten beschermen de huid, stof van gifstoffen, straling
- Op de natuur geïnspireerd materiaal maakt gebruik van vloeibare versterking
- Hout gebruiken in elektroden voor duurzamer, duurzame wearables
- Coronavirus:hoe lockdown voedselonzekerheid blootlegde in een kleine Bengaalse stad
- Project zoekt duurzame blauwdruk voor waterkrachtdammen
- Hoe verontreiniging te identificeren
- Wat voor soort reactie is fotosynthese?
- Warmte uit de kern van de aarde kan een onderliggende kracht zijn in platentektoniek
Hoofdlijnen
- Wat gebeurt er als dieren geïsoleerd evolueren?
- Misplaatste monarchen:clusters van vlinders in het noorden
- Poema's die in de buurt van menselijke ontwikkeling leven, verbruiken meer energie
- Nieuwe ontdekking om de ontwikkeling van zouttolerante wijnstokken te versnellen
- Gouden nanodeeltje gebruikt om virus te vervangen in nieuwe CRISPR-aanpak
- Onderzoek naar klimaatverandering van de achteruitgang van de jongen van lederschildpadden levert geen antwoorden op
- Wat zijn de drie belangrijkste verschillen tussen een plantencel en een dierencel?
- Facilitated Diffusion: Definition, Example & Factors
- Wat voor soort Allele slaat een generatie over?
- MIT-robot combineert visie en aanraking om het spel van Jenga . te leren

- Amazon rolt Scout-bezorgrobots uit

- Een nieuwe robotkwal die in staat is om 3D-straalvoortstuwing en -manoeuvres uit te voeren
- Het doorbraakalgoritme van Toshibas realiseert 's werelds snelste, grootschalige combinatorische optimalisatie
- Top antitrusthandhaver waarschuwt Big Tech voor gegevensverzameling


 Spinazie en nanodiamanten?
Spinazie en nanodiamanten?- Nieuw katalysatormateriaal produceert overvloedige goedkope waterstof
- Geavanceerde biobrandstoffen kunnen uiterst efficiënt worden geproduceerd
- Welke dieren in de woestijn zijn herbivoren?
- Hoe betrouwbaar zijn reconstructies en modellen voor temperatuurveranderingen in het verleden?
- Hoe het boren naar olie in het Arctic National Wildlife Refuge van invloed kan zijn op dieren in het wild
- Moleculaire ontwerpstrategie onthult bijna-infraroodabsorberende koolwaterstof
- Onderzoekers meten en modelleren inhomogene energielandschappen in grafeen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
