Wetenschap
Kleine vliegende robots vervoeren zware lasten
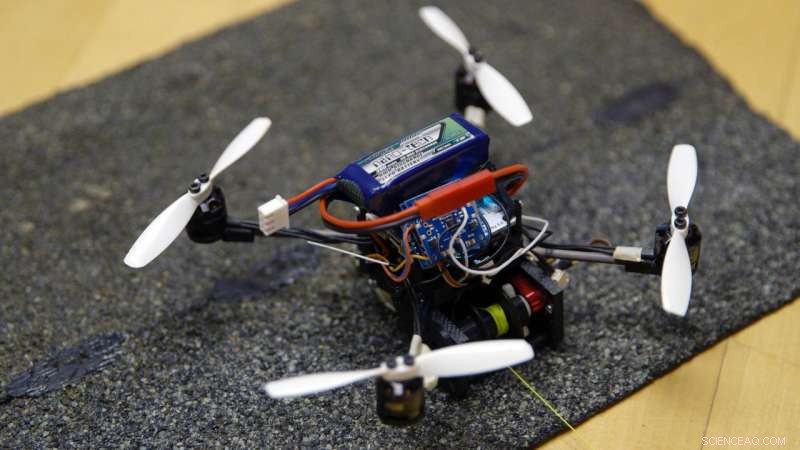
Een FlyCroTug met microspines vastgezet op een dakpan zodat hij een waterfles omhoog kan trekken. Krediet:Kurt Hickman
Een gesloten deur is slechts een van de vele obstakels die geen belemmering vormen voor een nieuw type vliegen, micro, sleeprobot genaamd een FlyCroTug. Uitgerust met geavanceerde grijptechnologieën en de mogelijkheid om objecten eromheen te verplaatsen en eraan te trekken, twee FlyCroTugs kunnen samen de deurklink vastlassen en de deur opentrekken.
Ontwikkeld in de laboratoria van Mark Cutkosky, de Fletcher Jones-leerstoel aan de School of Engineering aan de Stanford University, en Dario Floreano aan de École Polytechnique Fédérale de Lausanne in Zwitserland, FlyCroTugs zijn microluchtvoertuigen die de onderzoekers hebben aangepast zodat de voertuigen zichzelf kunnen verankeren aan verschillende oppervlakken met behulp van lijmen geïnspireerd op de voeten van gekko's en insecten, eerder ontwikkeld in het laboratorium van Cutkosky.
Met deze hechtingsmechanismen, FlyCroTugs kunnen objecten tot 40 keer hun gewicht trekken, zoals deurklinken in één scenario, of camera's en waterflessen in een reddingssituatie. Vergelijkbare voertuigen kunnen met behulp van aerodynamische krachten slechts objecten optillen die ongeveer twee keer hun eigen gewicht bedragen.
"Als je een kleine robot bent, de wereld is vol grote obstakels, " zei Matthew Estrada, een afgestudeerde student aan Stanford en hoofdauteur van een paper over FlyCroTugs, gepubliceerd op 25 oktober in Wetenschap Robotica . "Het combineren van de aerodynamische krachten van ons luchtvoertuig samen met de interactiekrachten die we genereren met de bevestigingsmechanismen resulteerde in iets dat erg mobiel was, zeer krachtig en ook micro."
De onderzoekers zeggen dat de FlyCroTugs door hun kleine formaat kunnen navigeren door knusse ruimtes en redelijk dicht bij mensen. waardoor ze nuttig zijn voor zoek- en reddingsacties. Stevig vasthouden aan oppervlakken terwijl ze trekken, de kleine robots kunnen mogelijk stukjes puin verplaatsen of een camera plaatsen om een verraderlijk gebied te evalueren.
Een richtsnoer nemen uit de natuur
Zoals bij de meeste projecten in Cutkosky's lab, de FlyCroTugs zijn geïnspireerd op de natuur. In de hoop een luchtvoertuig te hebben dat snel was, klein en zeer wendbaar, maar ook in staat om grote lasten te verplaatsen, de onderzoekers keken naar wespen.
"Wespen kunnen snel naar een stuk voedsel vliegen, en als het ding dan te zwaar is om mee te vertrekken, ze slepen het over de grond. Dus dit was een soort van begininspiratie voor de aanpak die we namen, " zei Cutkosky, wie is co-auteur van het artikel.
De onderzoekers lazen studies over het vangen en transporteren van wespenprooien, die de verhouding van vluchtgerelateerde spieren tot totale massa identificeren die bepaalt of een wesp met zijn prooi vliegt of hem sleept. Ze volgden ook het voorbeeld van de wesp door verschillende bevestigingsopties te hebben, afhankelijk van waar de FlyCroTugs landen.
Voor gladde oppervlakken, de robots hebben gekkogrijpers, niet-kleverige lijmen die de ingewikkelde teenstructuren van een gekko nabootsen en vasthouden door intermoleculaire krachten te creëren tussen de lijm en het oppervlak. Voor ruwe oppervlakken, deze robots zijn uitgerust met 32 microspines, een reeks vishaakachtige metalen stekels die afzonderlijk op kleine putjes in een oppervlak kunnen worden vastgeklikt.
Elke FlyCroTug heeft een lier met een kabel en microspines of gekko-lijm om te kunnen trekken. Afgezien van die vaste functies zijn ze verder zeer aanpasbaar. De locatie van de grijpers kan variëren afhankelijk van het oppervlak waar ze zullen landen, en de onderzoekers kunnen ook onderdelen toevoegen voor bewegingen op de grond, zoals wielen. Het was geen sinecure om al deze functies op een klein luchtvoertuig met tweemaal het gewicht van een golfbal te krijgen, volgens de onderzoekers.
"Mensen hebben de neiging om drones te zien als machines die vliegen en de wereld observeren, maar vliegende insecten doen veel andere dingen, zoals wandelen, klimmen, grijpen, bouwen - en sociale insecten kunnen zelfs samenwerken om krachten te vermenigvuldigen, " zei Floreano, wie was senior auteur op het papier. "Met dit werk we laten zien dat kleine drones die in staat zijn om te verankeren in de omgeving en samen te werken met andere drones taken kunnen uitvoeren die typisch zijn toegewezen aan humanoïde robots of veel grotere machines."
Interactie met de wereld
Drones en andere kleine vliegende robots lijken tegenwoordig misschien een rage, maar de FlyCroTugs - met hun vermogen om naar afgelegen locaties te navigeren, verankeren en trekken - vallen in een meer specifieke niche, volgens Cutkosky.
"Er zijn veel laboratoria over de hele wereld die beginnen te werken met kleine drones of luchtvoertuigen, maar als je kijkt naar degenen die ook nadenken over hoe deze kleine voertuigen fysiek kunnen interageren met de wereld, het is een veel kleinere set, " hij zei.

Het FlyCroTug-ontwerp is geïnspireerd op het vermogen van wespen om op een oppervlak te klikken en zware prooien te slepen. Krediet:Estrada et al., Wetenschap. Robot. 3, eaau6903 (2018)
Met twee FlyCroTugs kunnen de onderzoekers succesvol een deur openen. Ze hadden ook een vlieg boven op een afbrokkelende structuur en haalden een camera op om naar binnen te kijken. Volgende, ze hopen te werken aan autonome besturing en de logistiek van het vliegen met meerdere voertuigen tegelijk.
"De tools om voertuigen als deze te maken worden steeds toegankelijker, " zei Estrada. "Ik ben enthousiast over het vooruitzicht om deze bevestigingsmechanismen steeds meer in de gereedschapsriem van de ontwerper te integreren, robots in staat te stellen te profiteren van interactiekrachten met hun omgeving en deze voor nuttige doeleinden te gebruiken."
 Onderzoek wijst op ethische inkoop van materialen voor moderne technologie
Onderzoek wijst op ethische inkoop van materialen voor moderne technologie- Hoe te titreerbare zuurgraad te meten
- Onderzoekers ontwikkelen test van 15 minuten om immuunrespons te beoordelen
- Grote stappen voor het vastleggen van koolstof met behulp van aarde-overvloedige elementen als fotokatalytisch systeem
- Nieuwe verbinding kan fotodynamische therapie voor kanker verbeteren
- Onderzoekers brengen symbiotische relaties tussen bomen en microben wereldwijd in kaart
- Milieuactivisten klagen aan om de overname van federale wetlandvergunningen door Florida te stoppen
- Neerslagmetingen in heel Duitsland via het mobiele netwerk
- Bijna 2 miljoen hectare grasland in Groot-Brittannië is verloren gegaan door de uitbreiding van bossen en stedelijke gebieden
- Meer onderzoek nodig om uitbarsting van supervulkanen te voorspellen
Hoofdlijnen
- Waarom zijn er geen zeeslangen in de Atlantische Oceaan?
- Rollen van celorganellen in mitose
- Anti-verouderingsbehandelingen - de wetenschap van het leven langer
- Sumatraanse neushoorns zijn nooit hersteld van verliezen tijdens het Pleistoceen, genoom bewijs toont
- Verlichting aan het water verstoort de natuur in het omliggende ecosysteem drastisch
- Wat gebeurt er op een microscopisch niveau tijdens homeostase?
- De machtige Banyan-boom kan eeuwenlang lopen en leven
- Een natuurlijke schimmelstam kan olielekkages opruimen en de oliezanden van Albertas weer tot leven brengen
- Wat gebeurt er nadat u een wortel in zout water hebt gestopt?
- Amerikaanse luchtvaartchef zegt dat Boeing 737 MAX pas in 2020 opnieuw wordt gecertificeerd

- Ryanair waarschuwt voor banenverlies in Duitsland als stakingen aanhouden

- Watchdog zegt dat FBI toegang heeft tot ongeveer 640 miljoen foto's

- Met een terugval in iPhone-verkopen, zijn we post Peak Smartphone?

- Nu zie je het:detectie door een infraroodcamera ontwijken, octopusstijl

 Minder biobrandstoffen, meer groene ruimte:onderzoeker klimaatactie roept op tot dringende verandering
Minder biobrandstoffen, meer groene ruimte:onderzoeker klimaatactie roept op tot dringende verandering- India's droogperiode van 50 jaar en daaropvolgende omkering - strijd tussen natuurlijke en antropogene variabiliteit
- Orkaan stuurde vuil water uit de riolen naar Biscayne Bay. Wat gebeurt er nu?
- Video:Satellietgegevens bewaren
- Eerste bewijs dat slachtoffers van de middeleeuwse pest met grote zorg werden begraven
- Hoe u uzelf kunt beschermen tegen de hacktechniek van spear phishing
- Heisenberg-limiet krijgt een zinvolle update
- Hoe wordt fossiele brandstof omgezet in elektriciteit?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
